

Módulo de Motor de Alto Par HTPU-70BM-35-NE, 20Nm Nominal, Reducción 33, 35RPM, 73W
Módulo de Motor de Alto Par HTPU-70BM-35-NE, 20Nm Nominal, Reducción 33, 35RPM, 73W
HIGH TORQUE
Precio habitual
$642.00 USD
Precio habitual
Precio de oferta
$642.00 USD
Precio unitario
por
Impuestos incluidos.
Los gastos de envío se calculan en la pantalla de pago.
No se pudo cargar la disponibilidad de retiro
Resumen
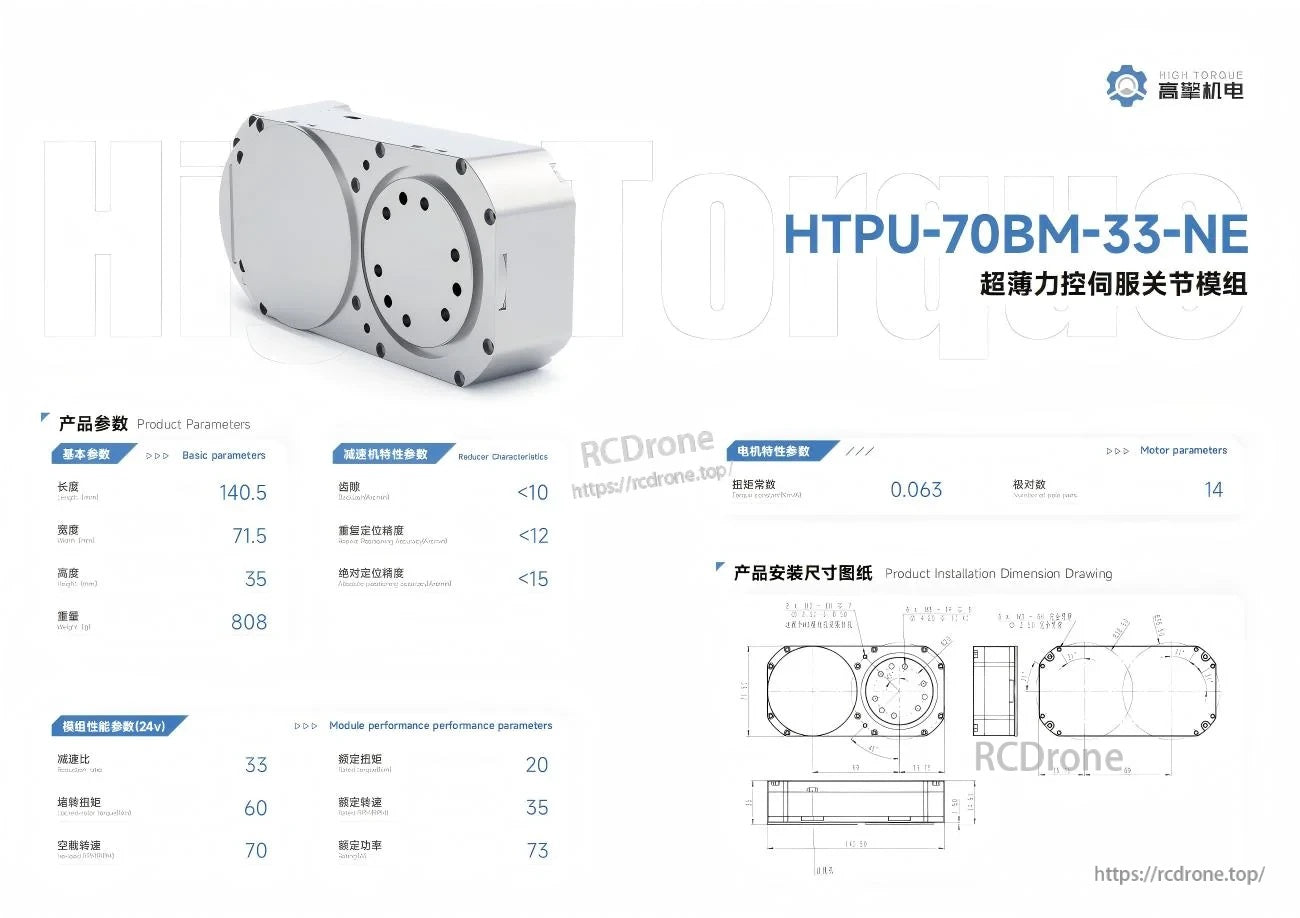
MOTOR HTPU-70BM-35-NE de ALTO PAR es un módulo de motor con engranaje de alto par y baja velocidad diseñado para juntas robóticas compactas y actuación de precisión. Es adecuado para aplicaciones que requieren un par de salida controlado, bajo retroceso y un rendimiento de posicionamiento repetible.
Características Clave
- Bajo retroceso: <10 Arcmin
- Rendimiento de posicionamiento: precisión de posicionamiento repetido <12 Arcmin; precisión de posicionamiento absoluto <15 Arcmin
- Salida de alto par: 20 Nm de par nominal; 60 Nm de par de rotor bloqueado
- Salida de baja velocidad: 35 RPM nominal; 70 RPM sin carga
- Relación de reducción: 33
Especificaciones
| Longitud y Ancho | 140.5mm |
| Ancho | 71.9mm |
| Altura | 35mm |
| Peso | 808g |
| Retroceso | <10 Arcmin |
| Precisión de Posicionamiento Repetido | <12 Arcmin |
| Precisión de Posicionamiento Absoluto | <15 Arcmin |
| Constante de Par | 0.063Nm/A |
| Número de pares de polos | 14 |
| Relación de reducción | 33 |
| Par de bloqueo del rotor | 60Nm |
| RPM sin carga | 70RPM |
| Par nominal | 20Nm |
| RPM nominal | 35RPM |
| Clasificación | 73W |
Para orientación sobre selección o preguntas de integración, comuníquese con soporte en https://rcdrone.top/ o envíe un correo electrónico a [email protected].
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos
- Vehículos AGV
- Robots ARU
Manuales
- Dibujo de instalación (PDF)
- Asistente de depuración de motor de ALTO PAR Manual del usuario (PDF)
- 1.2 Análisis del protocolo FDCAN (PDF)
- Manual del usuario (PDF)
- Modelo 3D (STEP)
Detalles
Diseñado para juntas robóticas compactas, el HTPU-70BM-35-NE combina una salida con engranaje de bajo retroceso con dimensiones de montaje claras para la integración.
Related Collections

