Holybro DroneCAN M8N Módulo GPS - Procesador STM32G4 BMM150 Brújula 3GNSS Compatible con protocolo DroneCAN
Holybro DroneCAN M8N Módulo GPS - Procesador STM32G4 BMM150 Brújula 3GNSS Compatible con protocolo DroneCAN
HolyBro
No se pudo cargar la disponibilidad de retiro
Descripción
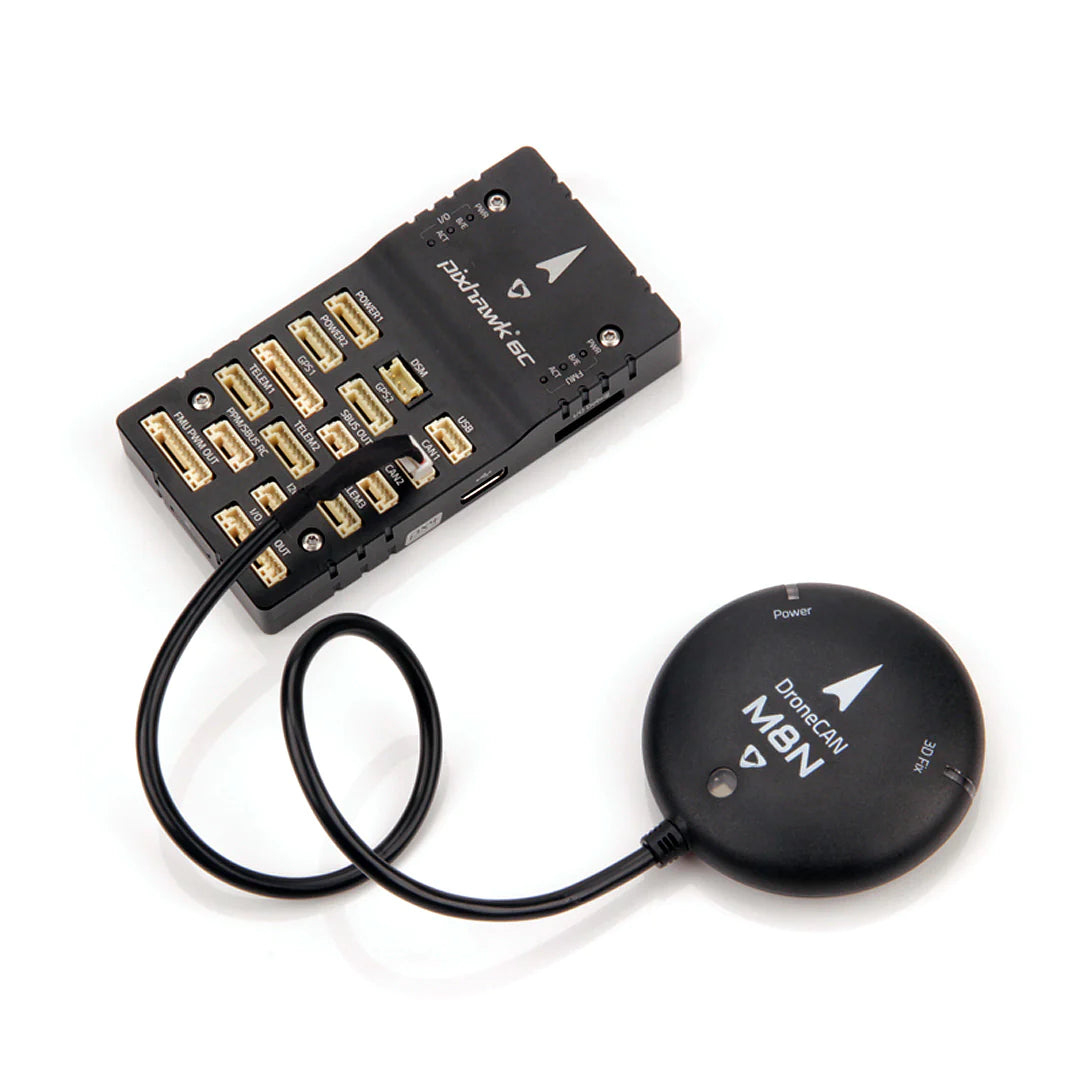
El GPS Holybro DroneCAN tiene un módulo UBLOX M8N o M9N, brújula BMM150 e indicador LED tricolor. Tiene el procesador STM32G4 y adoptó el protocolo DroneCAN para la comunicación, lo que lo hace más confiable y mejor para lidiar con interferencias electromagnéticas en comparación con la conexión en serie. No ocupa ningún puerto serie del controlador de vuelo y se pueden conectar diferentes dispositivos CAN al mismo bus CAN a través de una placa divisora CAN.
Especificación:
| DronCAN M8N | |
| Receptor GNSS | Ublox NEO M8N |
| Número de GNSS simultáneos | Hasta 3 GNSS (GPS, Galileo, GLONASS, BeiDou) |
| Procesador | STM32G4 (170MHz, 512K FLASH) |
| Brújula | BMM150 |
| Banda de frecuencia | GPS: L1C/A GLONASS: L10F Beidou: B1I Galileo: E1B/C |
| Sistema de aumento GNSS | SBAS: WAAS, EGNOS, MSAS, QZSS |
| Actualización de navegación | 5 Hz predeterminado (10 Hz MÁX.) |
| Precisión | 2,5 millones |
| Precisión de velocidad | 0,05 m/s |
| Número máximo de satélites | 22+ |
| Protocolo de comunicación | DroneCAN @ 1 Mbit/s |
| Admite FW de piloto automático | PX4, Ardupilot |
| Tipo de puerto | GHR-04V-S |
| Antena | Antena de parche cerámico de 25 x 25 x 4 mm |
| Consumo de energía | Menos de 200 mA a 5 V |
| Voltaje | 4,7-5,2 V |
| Temperatura de funcionamiento | -40~80C |
| Tamaño | Diámetro: 54 mm Espesor: 14,5 mm |
| Peso | 36g |
| Longitud del cable | 26cm |
| Otras notas | - Amplificador RF LNA MAX2659ELT+ - Capacitancia Farah recargable - Regulador de 3,3 V de bajo ruido |
Para obtener más información técnica, vaya a https://docs.holybro.com/
DroneCAN
DroneCAN es el protocolo CAN principal utilizado por los proyectos ArduPilot y PX4 para la comunicación con periféricos CAN. Es un protocolo abierto con comunicación abierta, especificación y múltiples implementaciones abiertas.
Desarrollo de DroneCAN
El proyecto DroneCAN tiene una comunidad de desarrollo activa.
- discusiones sobre discordia en https://dronecan.org/discord
- desarrollo en github en https://github.com/DroneCAN
Related Collections