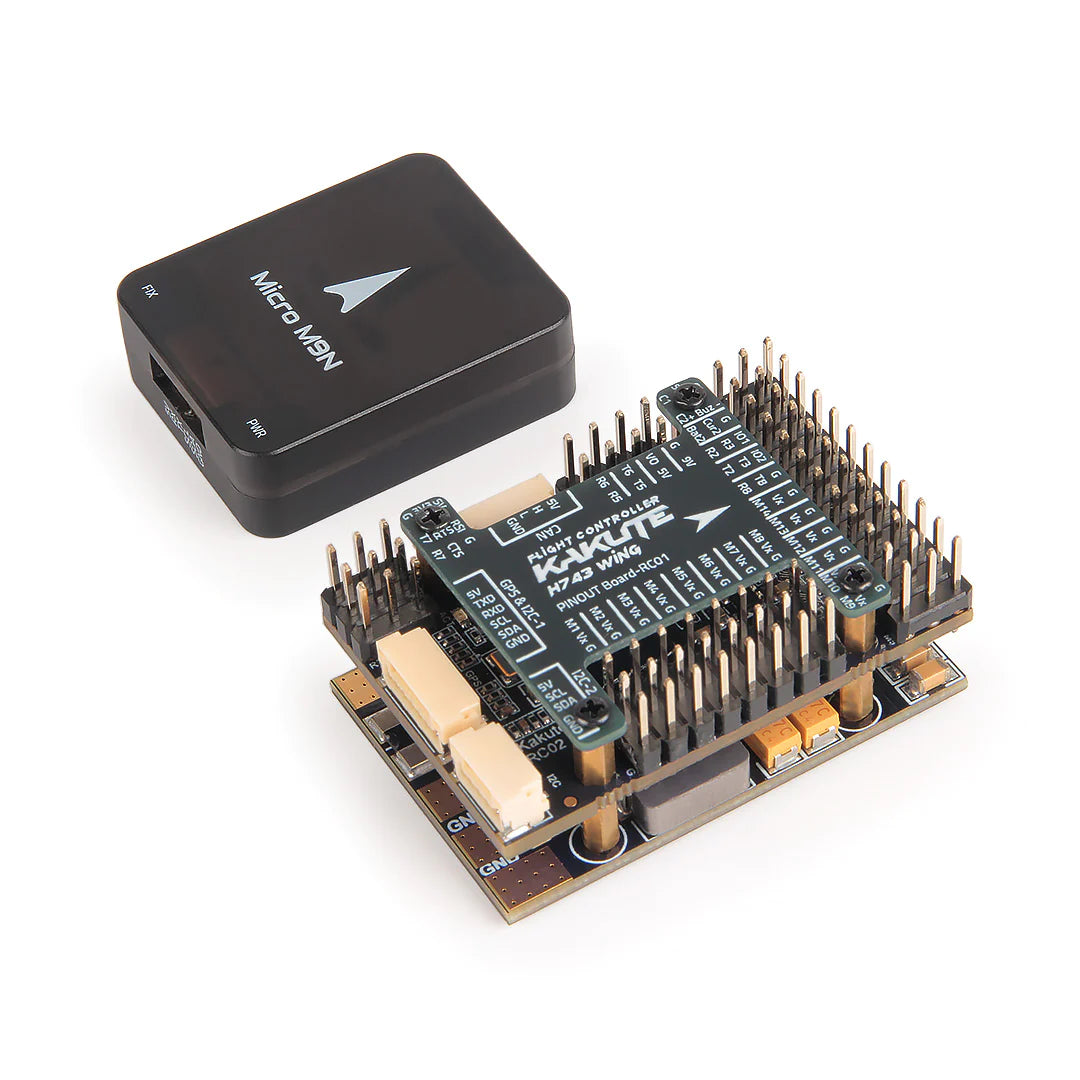
Controlador de vuelo con piloto automático Holybro Kakute H743-Wing: diseño específico para aplicaciones de ala fija y VTOL con módulo GPS M9N M10
Controlador de vuelo con piloto automático Holybro Kakute H743-Wing: diseño específico para aplicaciones de ala fija y VTOL con módulo GPS M9N M10
HolyBro
Precio habitual
$125.00 USD
Precio habitual
Precio de oferta
$125.00 USD
Precio unitario
por
Impuestos incluidos.
Los gastos de envío se calculan en la pantalla de pago.
No se pudo cargar la disponibilidad de retiro
Descripción general
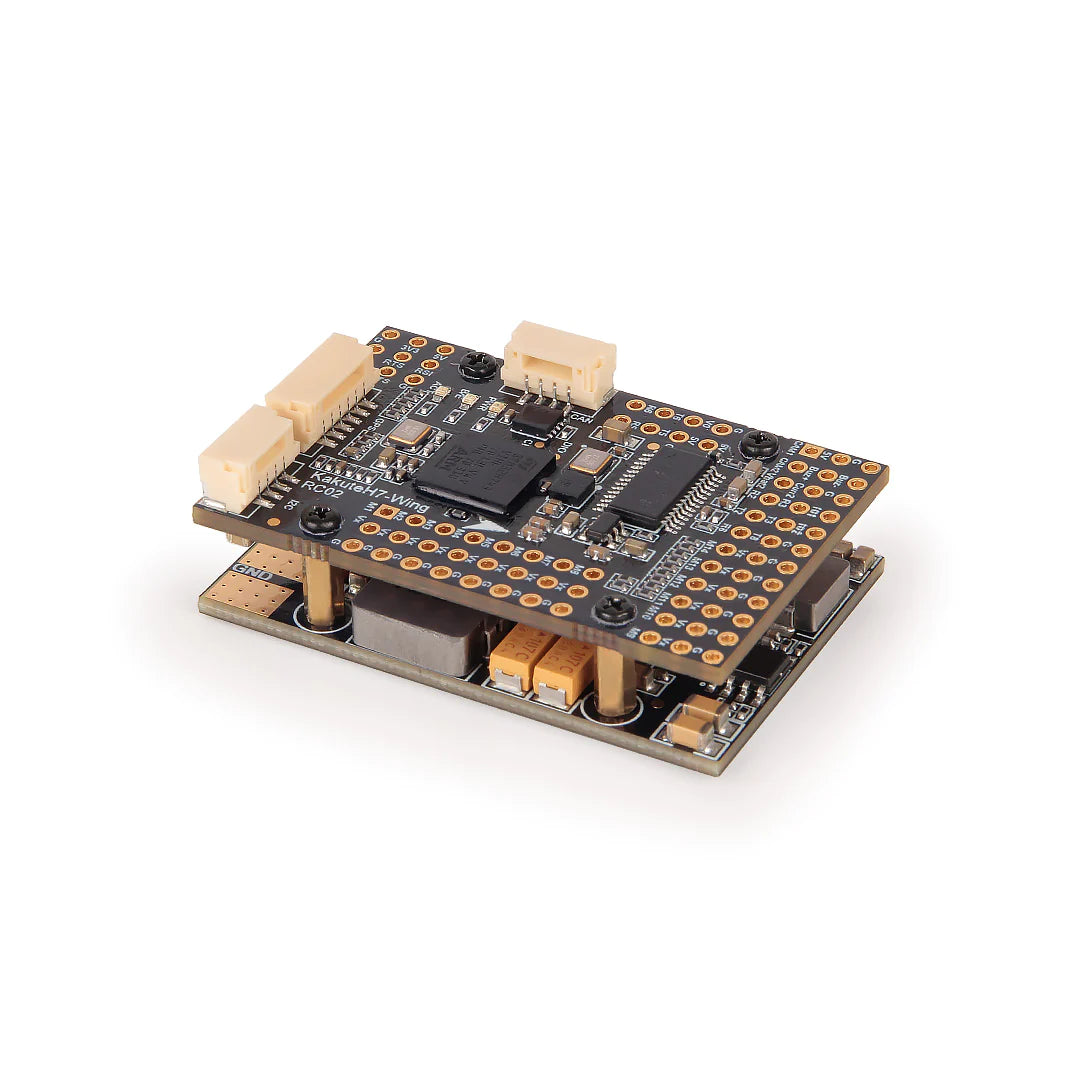
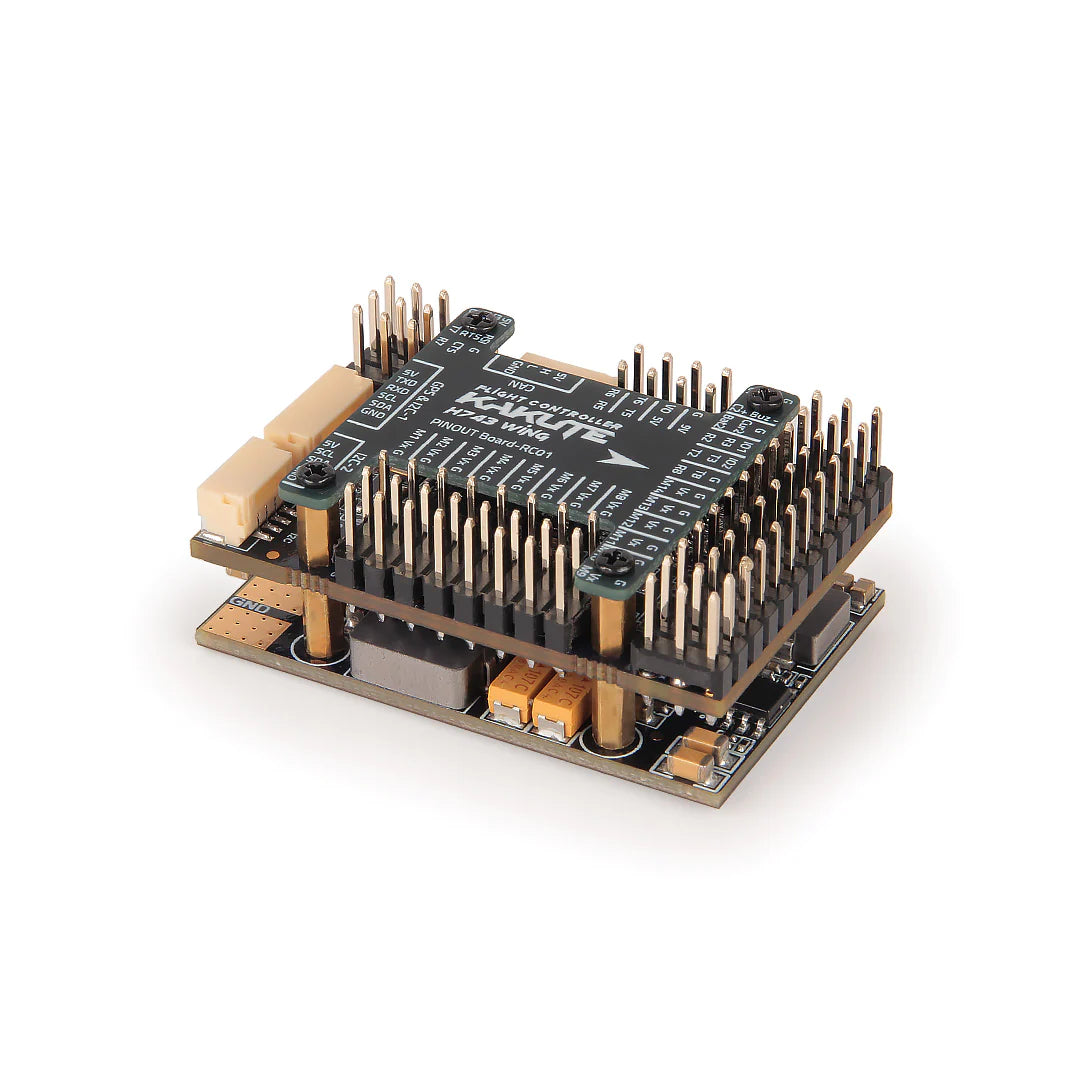
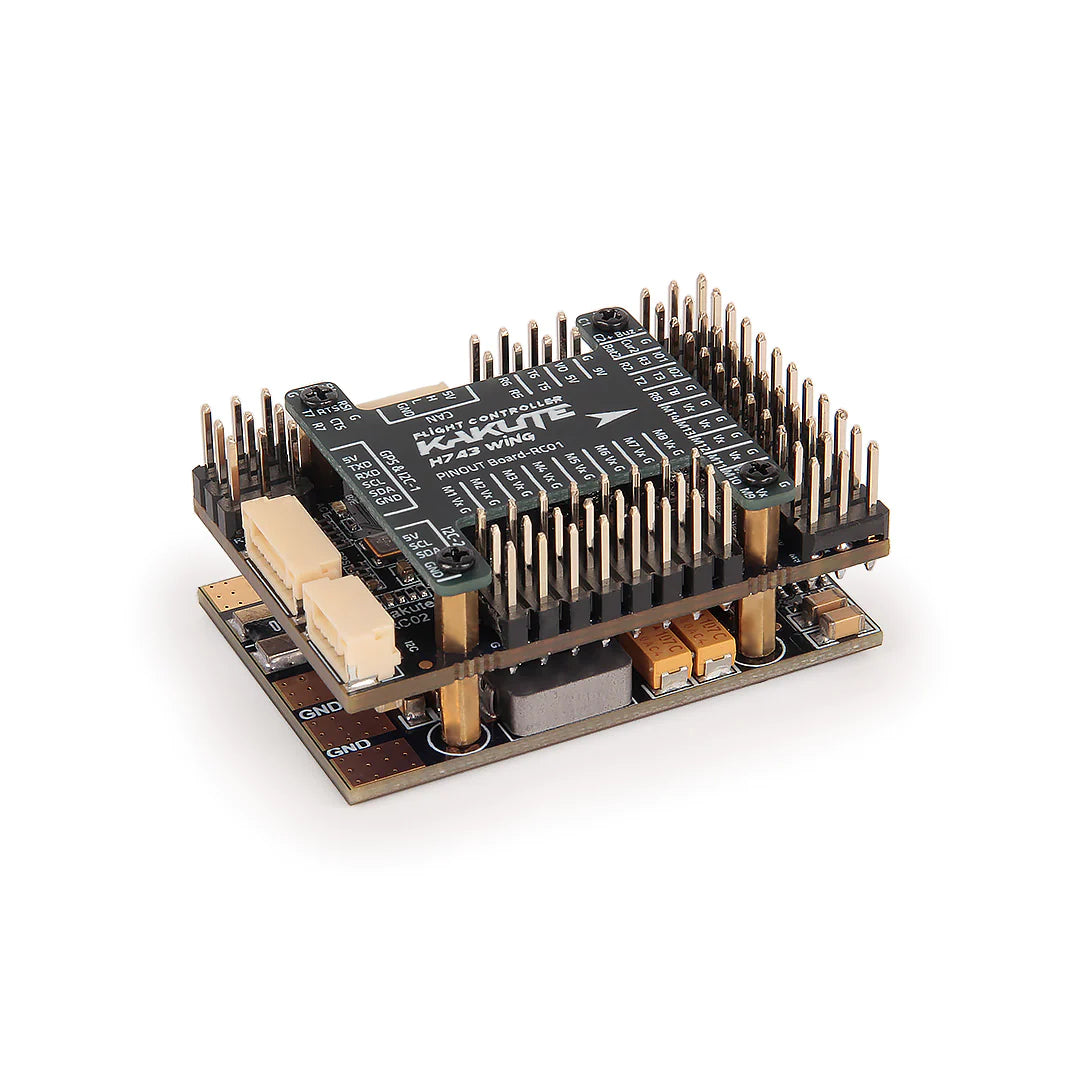
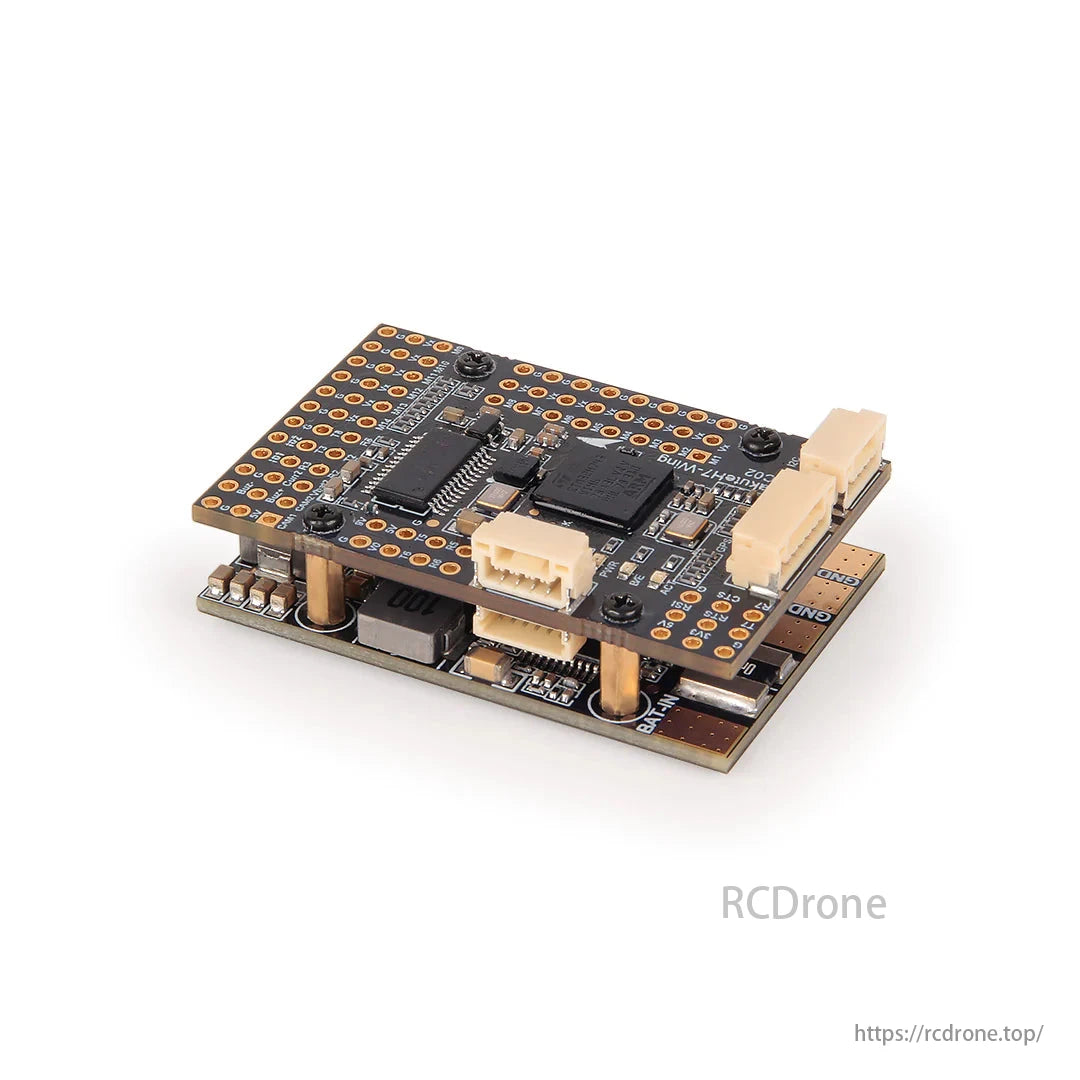
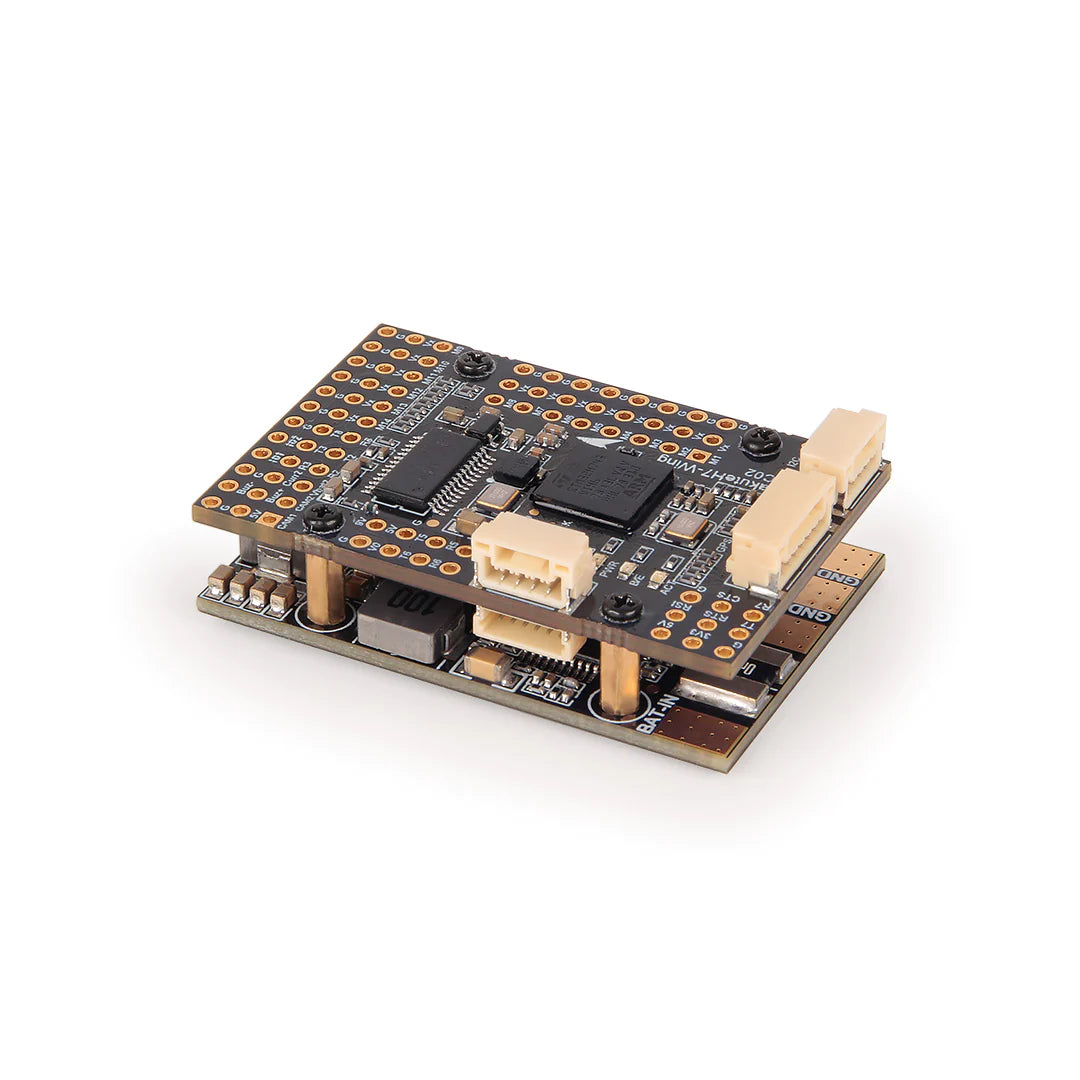
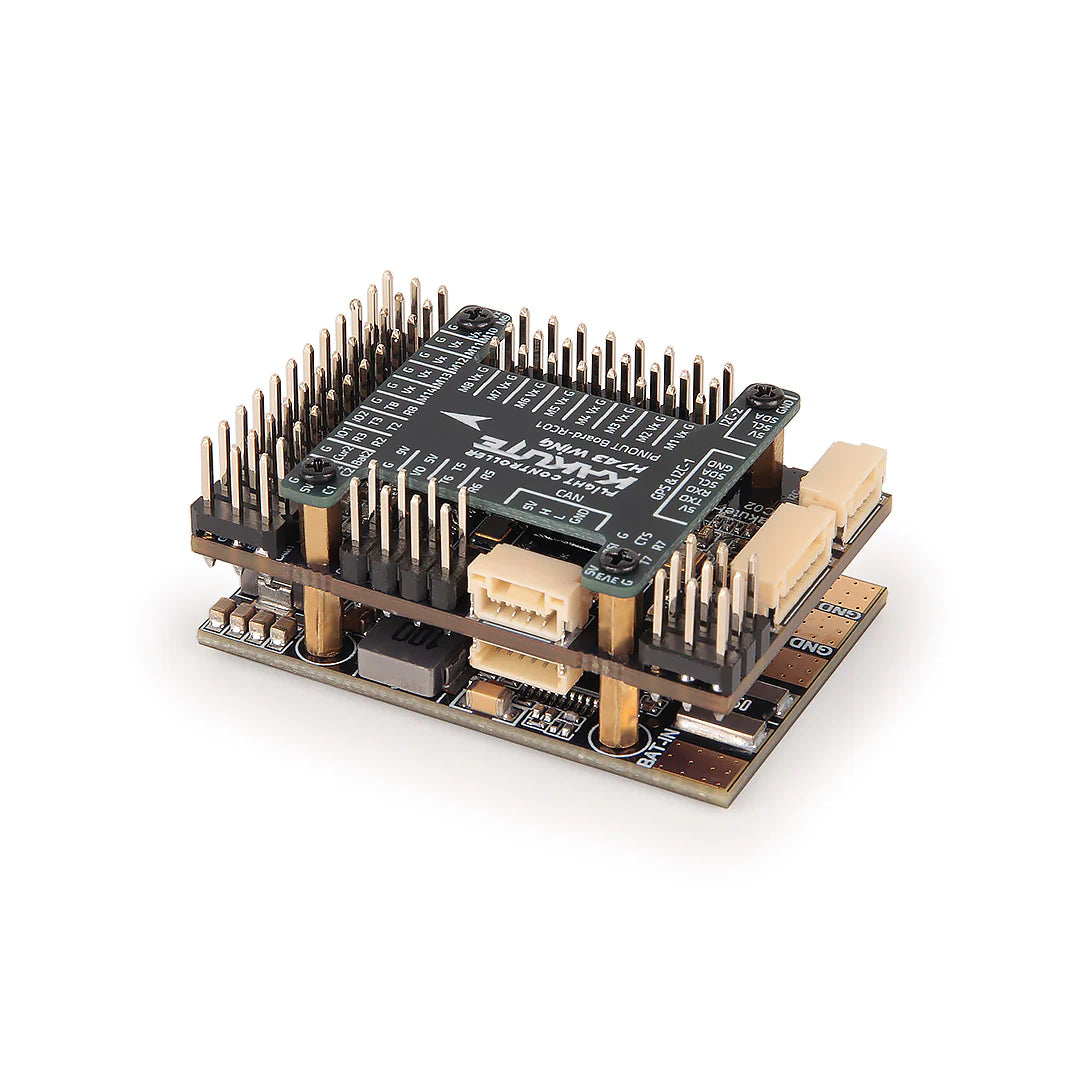
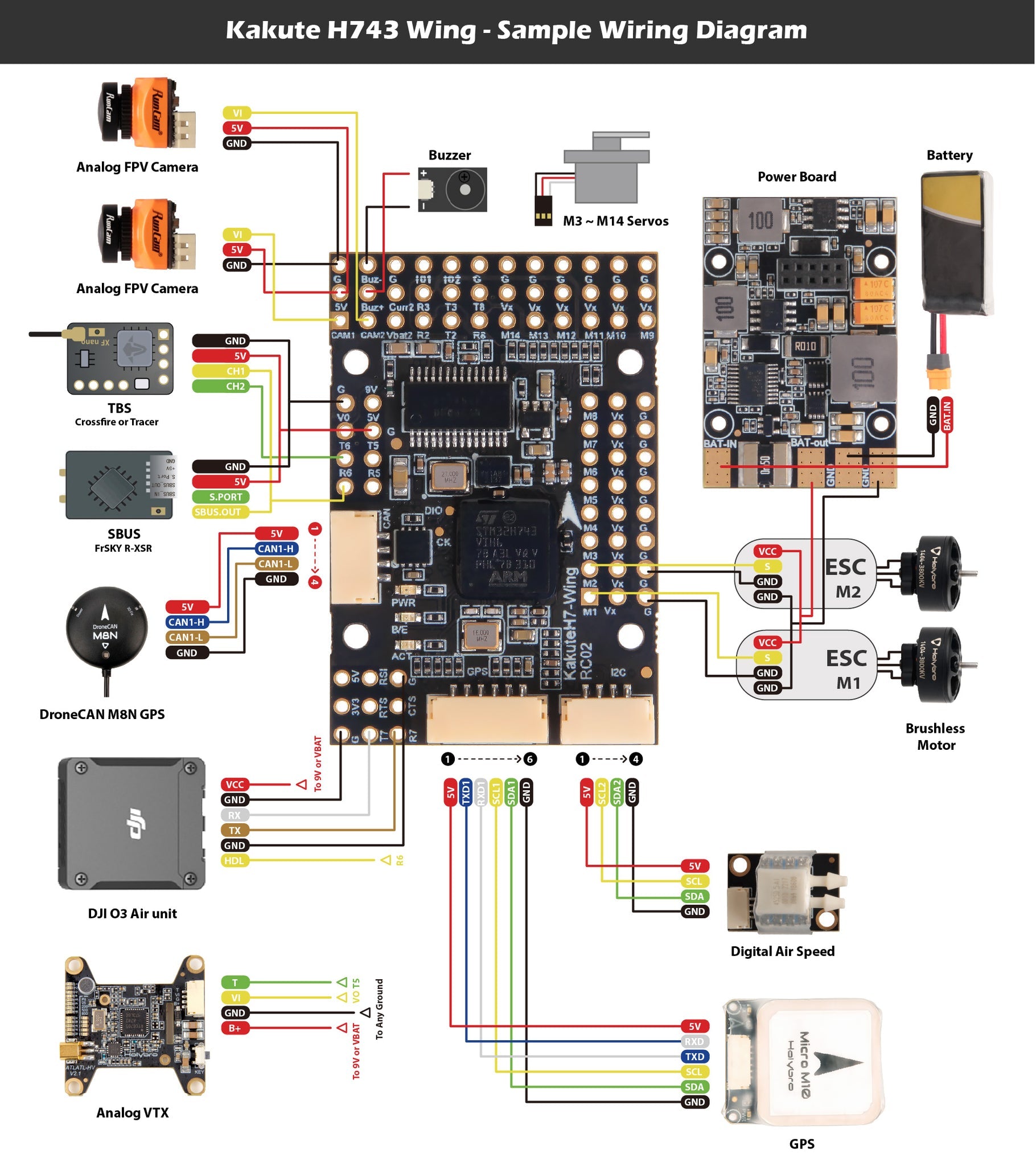
El Holybro Kakute H743 Wing es un controlador de vuelo con todas las funciones y un diseño específico para aplicaciones de ala fija y VTOL. Tiene el procesador STM32 H743 funcionando a 480 MHz y soporte CAN Bus, junto con soporte e interruptor de cámara dual, interruptor de encendido/apagado, 5 V, 6 V/8 V, 9 V/12 BEC y GPS plug-and-play, CAN. Puertos I2C.

Características
- MCU STM32H743 funcionando a 480 MHz
- IMU ICM-42688-P de alta precisión y bajo ruido
- Soporte de bus CAN
- Interruptor de entradas de cámara dual
- 3 Salida BEC integrada 5V, 6V/8V y 9V/12V
- Interruptor de pozo de encendido/apagado de 9 V/12 V
- Sensor de voltaje y corriente a bordo
- Barómetro BMP280 integrado
- Puertos GPS, CAN e I2C plug-and-play
- El diseño pequeño y de perfil bajo cabe en marcos compactos
- Soporta INAV (6.1.1 y posteriores), Ardupilot (4.4 y posteriores)
Especificaciones
- MCU: STM32H743, 480 MHz, 1 MB de RAM, 2 MB de memoria flash
- IMU: ICM-42688P (SPI3)
- Baro: BMP280 (I2C4)
- OSD: AT7456E (SPI2)
- Blackbox: ranura para tarjeta MicroSD en SDMMC2
- 7x Uarts (1,2,3,5,6,7,8) con inversión incorporada.
- 14x salidas PWM, 1x CAN, 5x ADC (Bat1/Curr1, Bat2/Curr2 y RSSI)
- 3x I2C (I2C1 e I2C2 para dispositivos externos, I2C4 para sensores integrados)
- 3 LED para ESTADO FC (azul, rojo) e indicador de 3,3 V (verde)
- Extensor de llave USB/DFU con USB tipo C
- Interruptor de entradas de cámara dual
- 5V/9V(12V) para interruptor de alimentación de cámara/VTX
- Detección de corriente de alta precisión (90 A continuo, 220 A pico)
- Sensor de voltaje de la batería: 5K:25.5K (Escala 1800 en INAV, BATT_VOLT_MULT 18.18 en ArduPilot)
- Potencia estática 160mA@5V
Soporte de firmware
-
Objetivo de Ardupilot: KAKUTEH7-Wing(Ardupilot 4.4 o posterior)
- Objetivo INAV: KAKUTEH7Wing (INAV 6.1.1 o posterior)
PDB
- Rango de voltaje de entrada: 10~36V (3~8S LiPo)
- 1x almohadillas de alimentación ESC
- Sentido de corriente: 90 A continuo, 220 A pico. (Escala 275 en INAV, 36 A/V en ArduPilot)
Salida BEC 5V
- Diseñado para FC, receptor, OSD, cámara, tira de LED 2812, zumbador, GPS, sensor de velocidad del aire, etc.
- Salida 5,15 +/- 0,1 VCC
- Corriente continua 2 amperios, pico 3 A
Salida BEC 9V /12V
- Diseñado para transmisor de vídeo, cámara, cardán, etc.
- Corriente continua 2 amperios, pico 3 A
- Opción de 12 V con puente
Salida BEC Vx
- Diseñado para servos
- Voltaje ajustable, 6 V predeterminado, opción de 8 V con puente
- Corriente continua 6 amperios, pico 8 A
Salida BEC de 3,3 V
- Regulador lineal
- Corriente continua: 200 mA
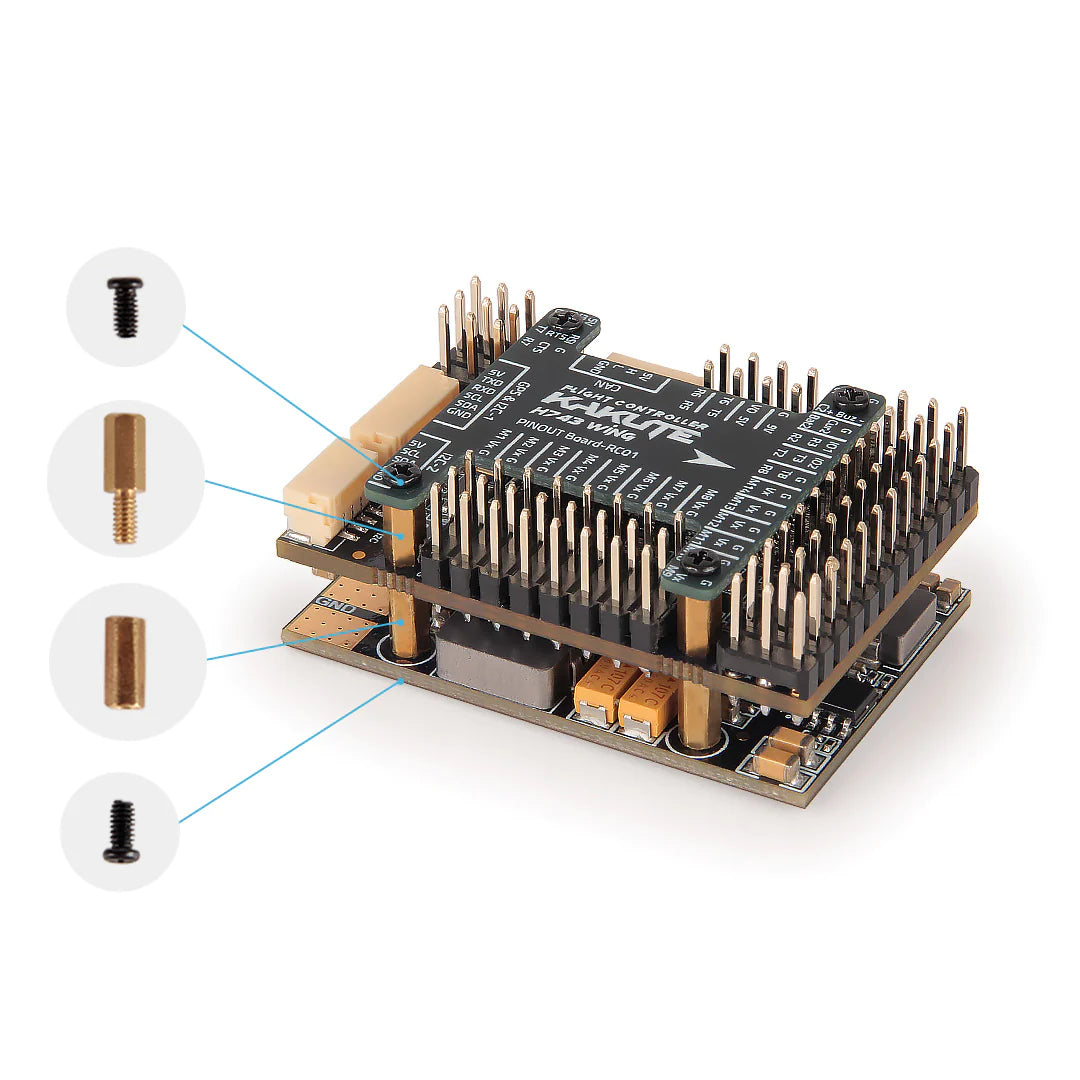
Mecánico
- Montaje: 25 x 25 mm, orificio M2
- Dimensiones: 45x 30 x 13.5mm
- Peso: 28 g con extensor USB
Enlace de referencia
- Página de documentación de Holybro
- Guía de configuración del interruptor de cámara y del interruptor de encendido/apagado de 9 V/12 V
- WIKI de Arduino
- Mapeo de Ardupilot
- Mapeo INAV
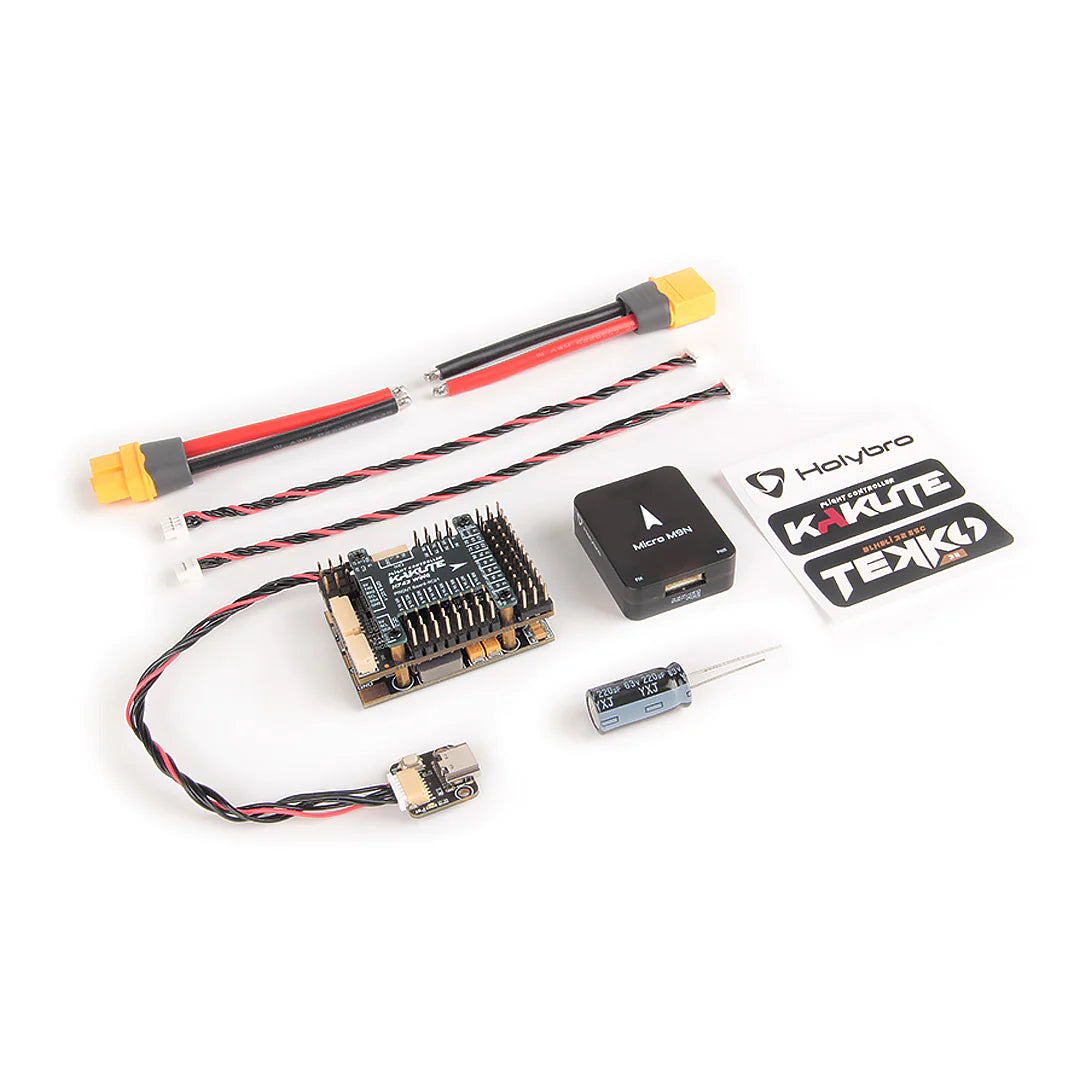
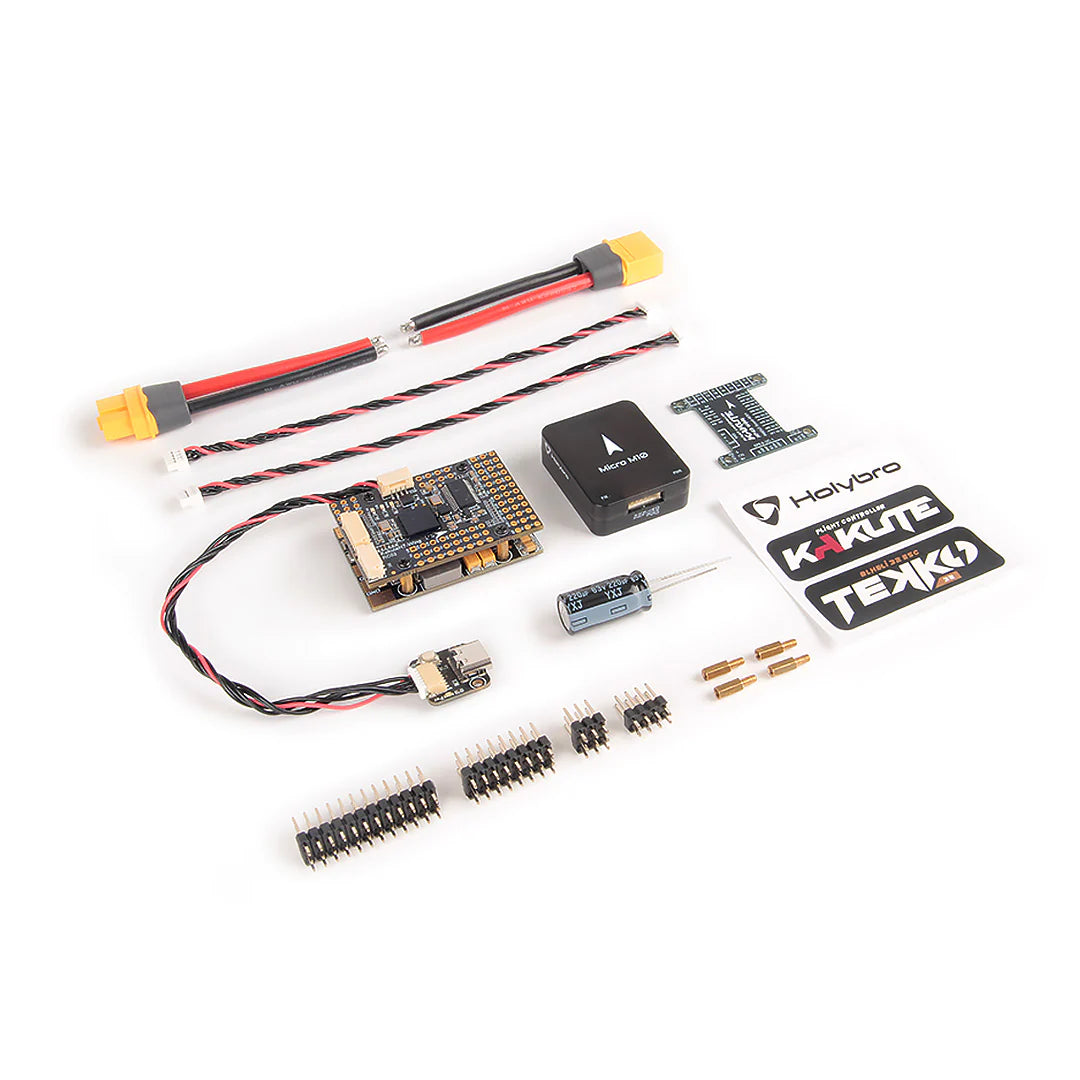
El paquete incluye
- 1 controlador de vuelo Kakute H743-Wing
- 1x placa de alimentación
- 1x tablero superior
- 1x placa USB-EXT
- 1 módulo GPS (opcional)
- 1x Condensador electrolítico: 220uF 62v
- 2 cables de alimentación XT60 de 60 mm
- Juegos de 4 2,54 pines DuPont
- 2 cables JST-GH de 4 pines
- 1x 15 cm JST-SH Cable de 6 pines (para placa USB-EXT)
Manual:
Manual Holybro Kakute H743-Wing v1.0
Related Collections