





Controlador de vuelo Holybro Pix32 v6, conjunto estándar de módulo STM32H743 FC basado en Mini conjunto con GPS M8N/M9N/M10
Controlador de vuelo Holybro Pix32 v6, conjunto estándar de módulo STM32H743 FC basado en Mini conjunto con GPS M8N/M9N/M10
HolyBro
No se pudo cargar la disponibilidad de retiro
El Pix32 v6 es la última actualización de los controladores de vuelo pix32 v5. Es una variante del Pixhawk 6C. Se compone de un controlador de vuelo independiente y una placa portadora que están conectadas por un conector de 100 pines. Está diseñado para aquellos pilotos que necesitan un sistema de control de vuelo de alta potencia, flexible y personalizable.
Dentro del Pix32 v6, puede encontrar un STM32H743 basado en STMicroelectronics®, combinado con tecnología de sensores de Bosch® e InvenSense®, lo que le brinda flexibilidad y confiabilidad para controlar cualquier vehículo autónomo, adecuado para aplicaciones académicas y comerciales.
El microcontrolador H7 del Pix32 v6 contiene el núcleo Arm® Cortex®-M7 que funciona hasta 480 MHz, tiene 2 MB de memoria flash y 1 MB de RAM. Gracias a la potencia de procesamiento actualizada, los desarrolladores pueden ser más productivos y eficientes con su trabajo de desarrollo, lo que permite algoritmos y modelos complejos. Incluye IMU de alto rendimiento y bajo ruido a bordo, diseñadas para ser rentables y al mismo tiempo tener redundancia de IMU. Un sistema de aislamiento de vibraciones para filtrar las vibraciones de alta frecuencia y reducir el ruido para garantizar lecturas precisas, lo que permite que los vehículos alcancen mejores rendimientos generales de vuelo.
Este controlador de vuelo es perfecto para personas que buscan un vuelo modular y asequible. Controlador que puede utilizar una placa base personalizada. Hemos hecho públicos los esquemas de la placa base pix32 v6. Puede crear usted mismo una placa portadora personalizada o simplemente dejarnos ayudarle con ella. Al utilizar una placa base personalizada, puede asegurarse de que el tamaño físico, la distribución de pines y los requisitos de distribución de energía coincidan perfectamente con su vehículo, asegurando que tenga todas las conexiones que necesita y ninguno de los gastos y la cantidad de conectores que no necesita.
Puntos clave de diseño:
- Procesador STM32H743 de alto rendimiento con más potencia informática y RAM
- Nuevo diseño rentable con factor de forma de perfil bajo
- Sistema de aislamiento de vibraciones integrado de nuevo diseño para filtrar las vibraciones de alta frecuencia y reducir el ruido para garantizar lecturas precisas
- Las IMU tienen control de temperatura mediante resistencias de calentamiento integradas, lo que permite una temperatura de funcionamiento óptima de las IMU
Nota:
- Tabla comparativa de módulos de alimentación
- M10 GPS requiere PX4 1.14, se requiere ArduPilot 4.3 o posterior. (A partir del 7 de septiembre de 2023, PX4 lanzó 1.14 RC1 (versión candidata). Consulte este enlace para obtener los detalles de la versión más reciente. Puede encontrar más detalles sobre cómo actualizar la versión RC aquí.)
Diseñe su propio zócalo personalizado con facilidad, utilizando el archivo de diseño de referencia proporcionado.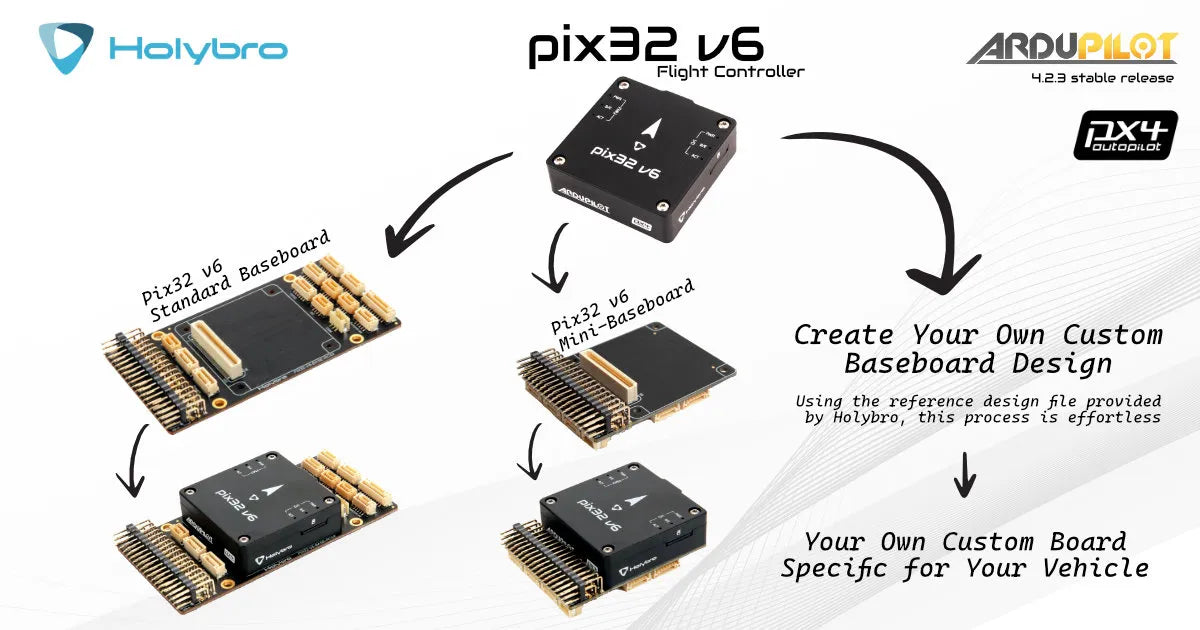
SKU20190/20192 Incluye:
- Módulo controlador de vuelo Pix32 v6
- Zócalo estándar / Mini zócalo
- Módulo de alimentación PM02 V3 12S
- Juego de cables estándar
SKU20191/SKU20193 Incluye:
- Módulo controlador de vuelo Pix32 v6
- Zócalo estándar / Mini zócalo
- Módulo de alimentación PM02 V3 12S
- Juego de minicables
- GPS M8N / GPS M9N / GPS M10
Nota: El conjunto estándar Pix32v6 se enviará con la placa base Pix32v5 hasta nuevo aviso; para obtener información adicional sobre la placa base, consulte aquí.
Related Collections












