Controlador de vuelo con piloto automático Holybro Pixhawk 4
Controlador de vuelo con piloto automático Holybro Pixhawk 4
HolyBro
No se pudo cargar la disponibilidad de retiro
Pixhawk® 4 cuenta con tecnología de procesador avanzada de STMicroelectronics®, tecnología de sensores de Bosch®, InvenSense® y un sistema operativo en tiempo real NuttX, que ofrece un rendimiento, una flexibilidad y una confiabilidad increíbles para controlar cualquier vehículo autónomo.
El microcontrolador del Pixhawk 4 tiene una memoria flash de 2 MB y una RAM de 512 KB. Con el aumento de potencia y recursos de RAM, los desarrolladores pueden ser más productivos y eficientes con su trabajo de desarrollo. Se pueden implementar algoritmos y modelos más complejos en el piloto automático.
Las IMU de alto rendimiento y bajo nivel de ruido que se encuentran a bordo están diseñadas para aplicaciones de estabilización. Las señales de todos los sensores que contienen datos se envían a pines de captura de interrupción y temporizador separados en el piloto automático, lo que permite registrar con precisión la hora de los datos de los sensores. Los aislamientos de vibración de nuevo diseño permiten realizar lecturas más precisas, lo que permite que los vehículos alcancen un mejor rendimiento general de vuelo.
Los dos buses SPI externos y las seis líneas de selección de chip asociadas permiten agregar sensores adicionales y una carga útil con interfaz SPI. Hay un total de cuatro buses I2C, dos dedicados para uso externo y dos agrupados con puertos seriales para módulos GPS/Compass.
Nota:
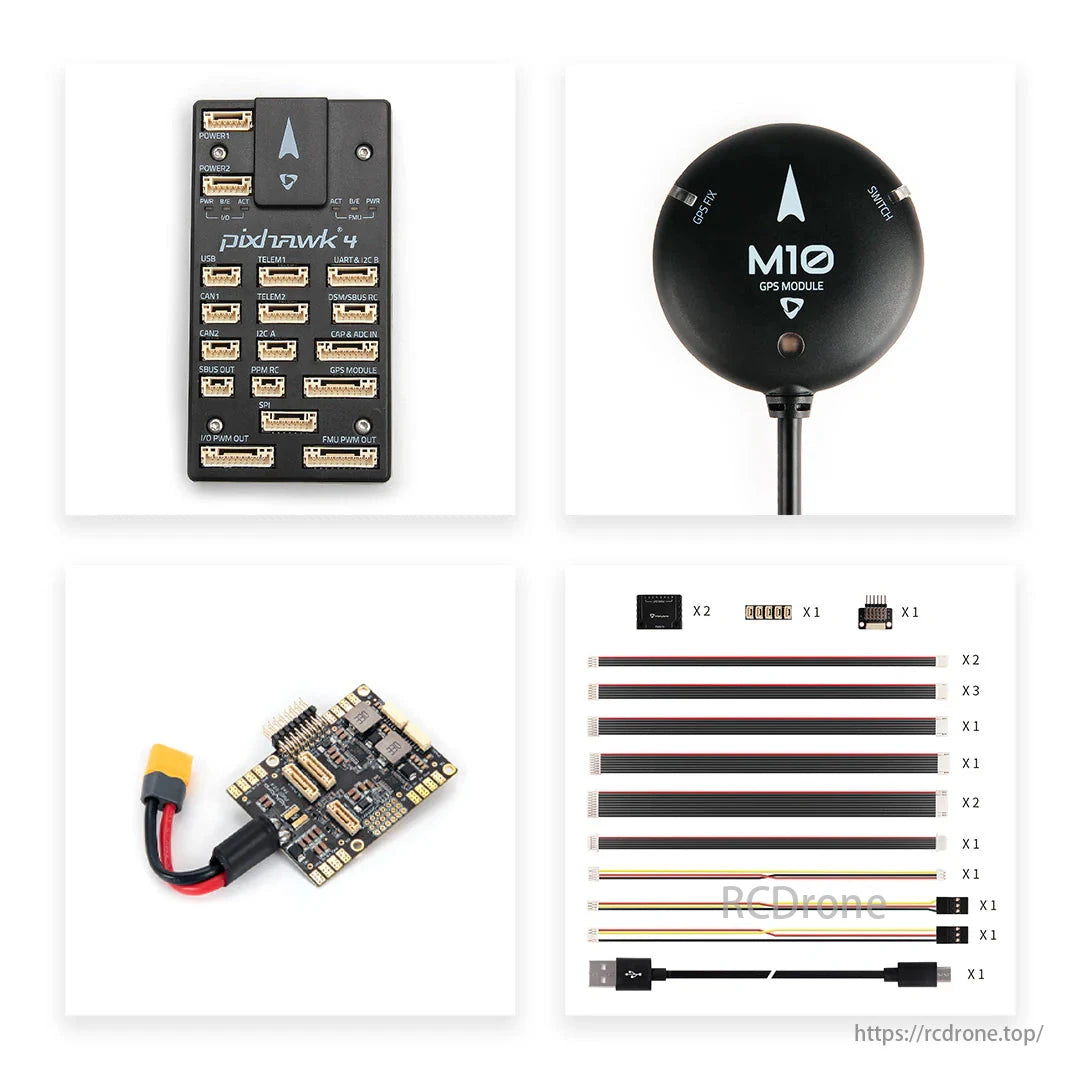
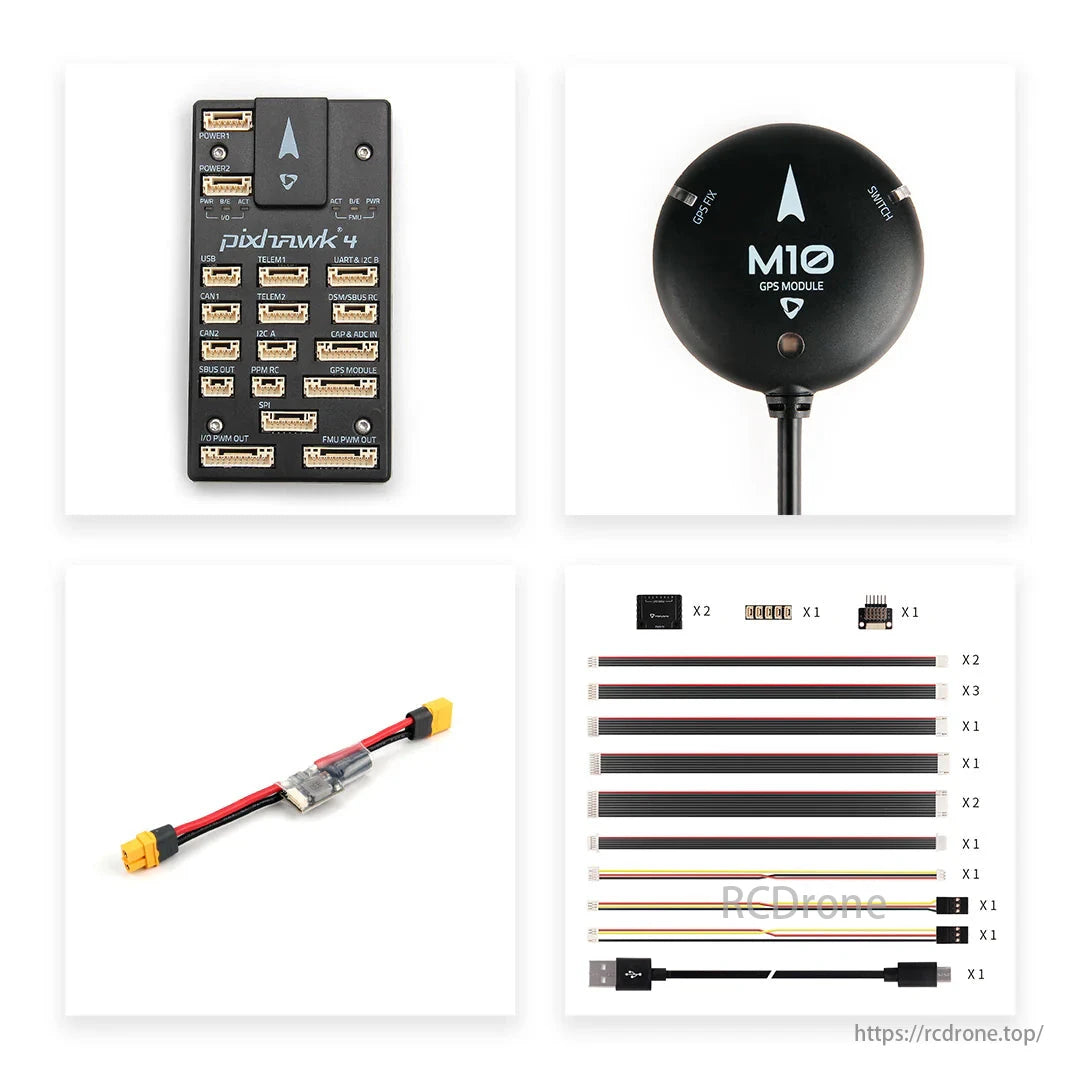
- Requiere GPS M10 PX4 1.14 y ArduPilot 4.3 o más reciente.
- Cuadro comparativo de módulos de potencia
Especificaciones técnicas
- Procesador principal de FMU
- STM32F765 - ARM® Cortex® -M7 de 32 bits, 216 MHz, memoria de 2 MB, RAM de 512 KB
- STM32F765 - ARM® Cortex® -M7 de 32 bits, 216 MHz, memoria de 2 MB, RAM de 512 KB
- Procesador IO
- STM32F103 - ARM® Cortex®-M3 de 32 bits, 72 MHz, 64 KB de SRAM (actual)
- STM32F100 - ARM® Cortex® -M3 de 32 bits, 24 MHz, 8 KB de SRAM (descontinuado)
- Sensores a bordo
- Acelerador/Giroscopio: ICM-20689
- Acelerador/Giroscopio: BMI055/ICM-20602
- Revista: IST8310
- Barómetro: MS5611
- Acelerador/Giroscopio: ICM-20689
Datos eléctricos
- Salida del módulo de potencia: 4,9 ~ 5,5 V
- Voltaje máximo de entrada: 6 V
- Detección de corriente máxima: 120 A
- Entrada de alimentación USB: 4,75 ~ 5,25 V
- Entrada de riel servo: 0 ~ 36 V
- Temperatura de funcionamiento: -25-85 °C
Datos mecánicos
- Dimensiones: 44x84x12mm
- Peso (caja de plástico): 33.3g
- Peso (caja de aluminio): 49 g
Descargas:
Código 11032/11035 Incluye:
- Controlador de vuelo Pixhawk 4 (plástico o aluminio)
- Juego de cables
Código de artículo 20045/20046/20114/20115 Incluye:
- Controlador de vuelo Pixhawk 4(Plástico o Aluminio)
- Módulo de potencia: PM02 V3 12S/PM07 14S
- Juego de cables
Código 20139/20140/20141/20142/20269/20270/20271/20272 Incluye:
- Controlador de vuelo Pixhawk 4
- Módulo de potencia: PM02 V3 12S/PM07 14S
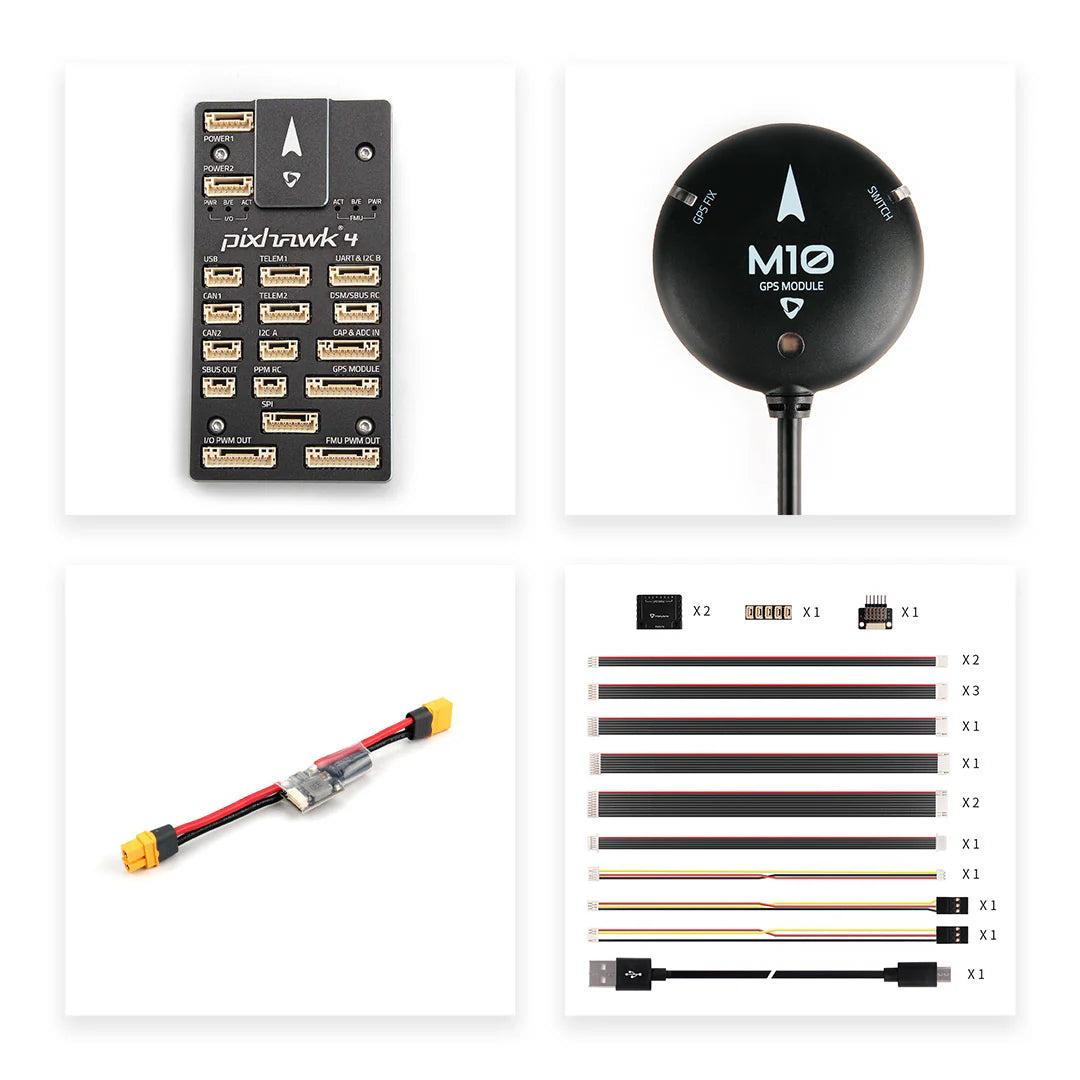
- GPS: M9N/M10
- Juego de cables

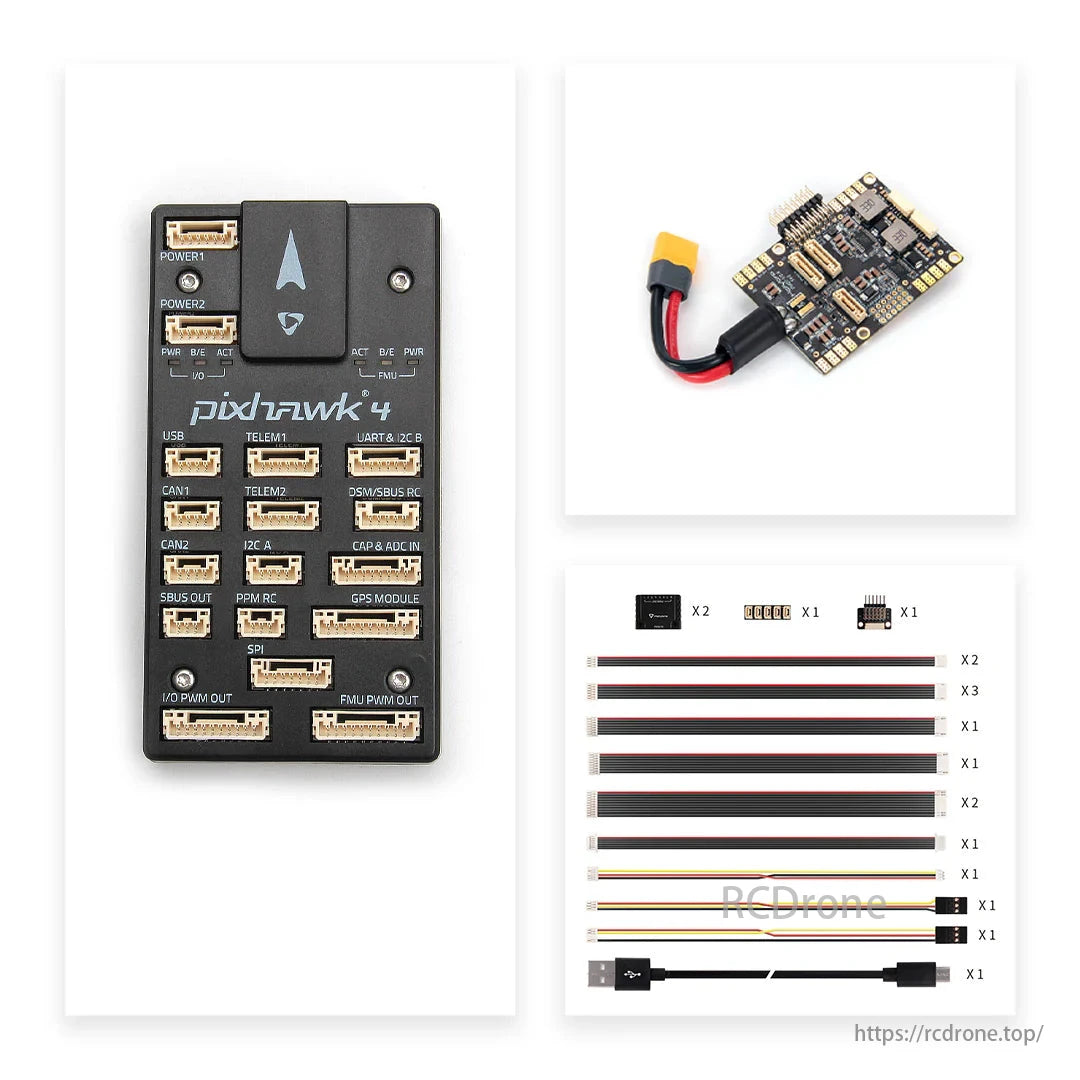
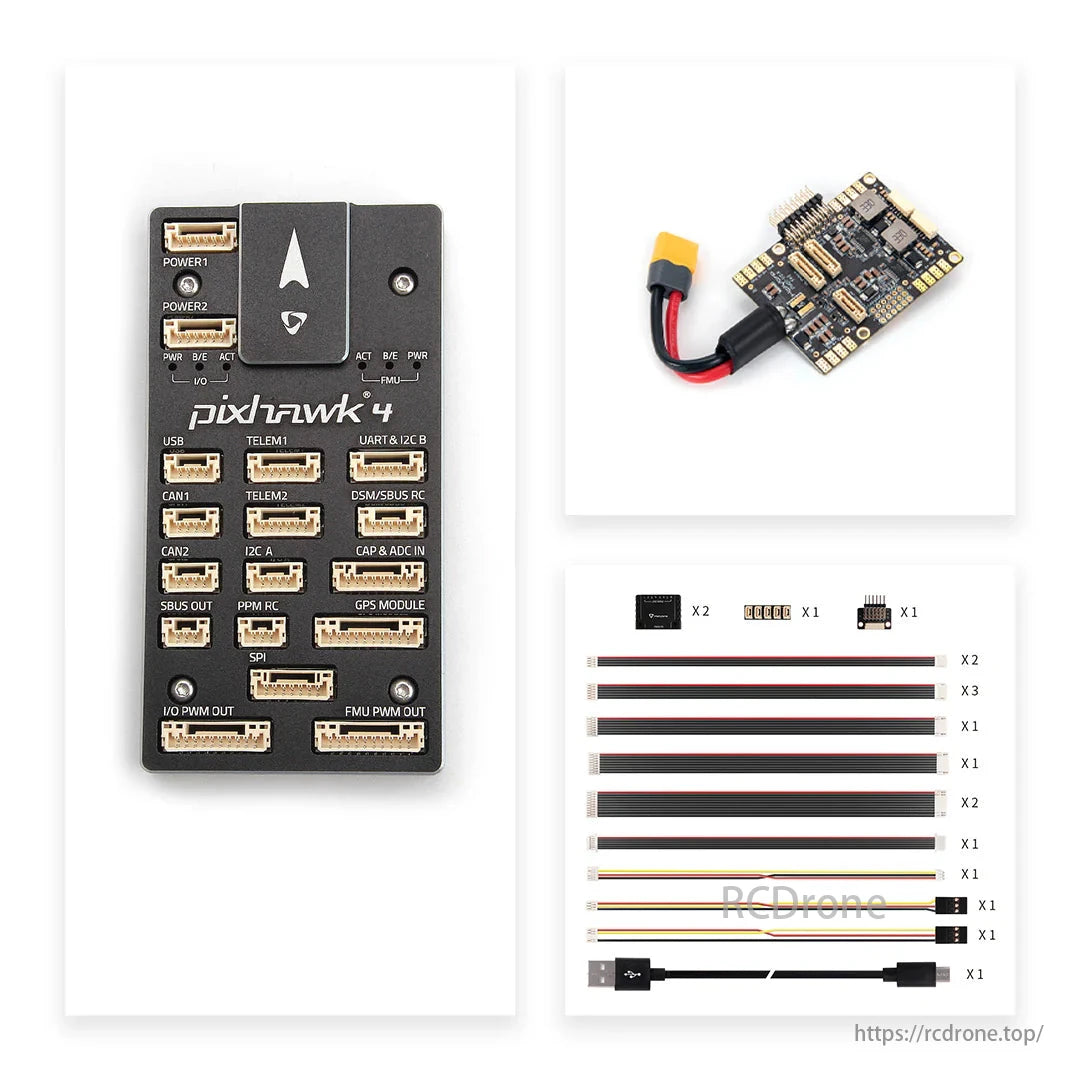
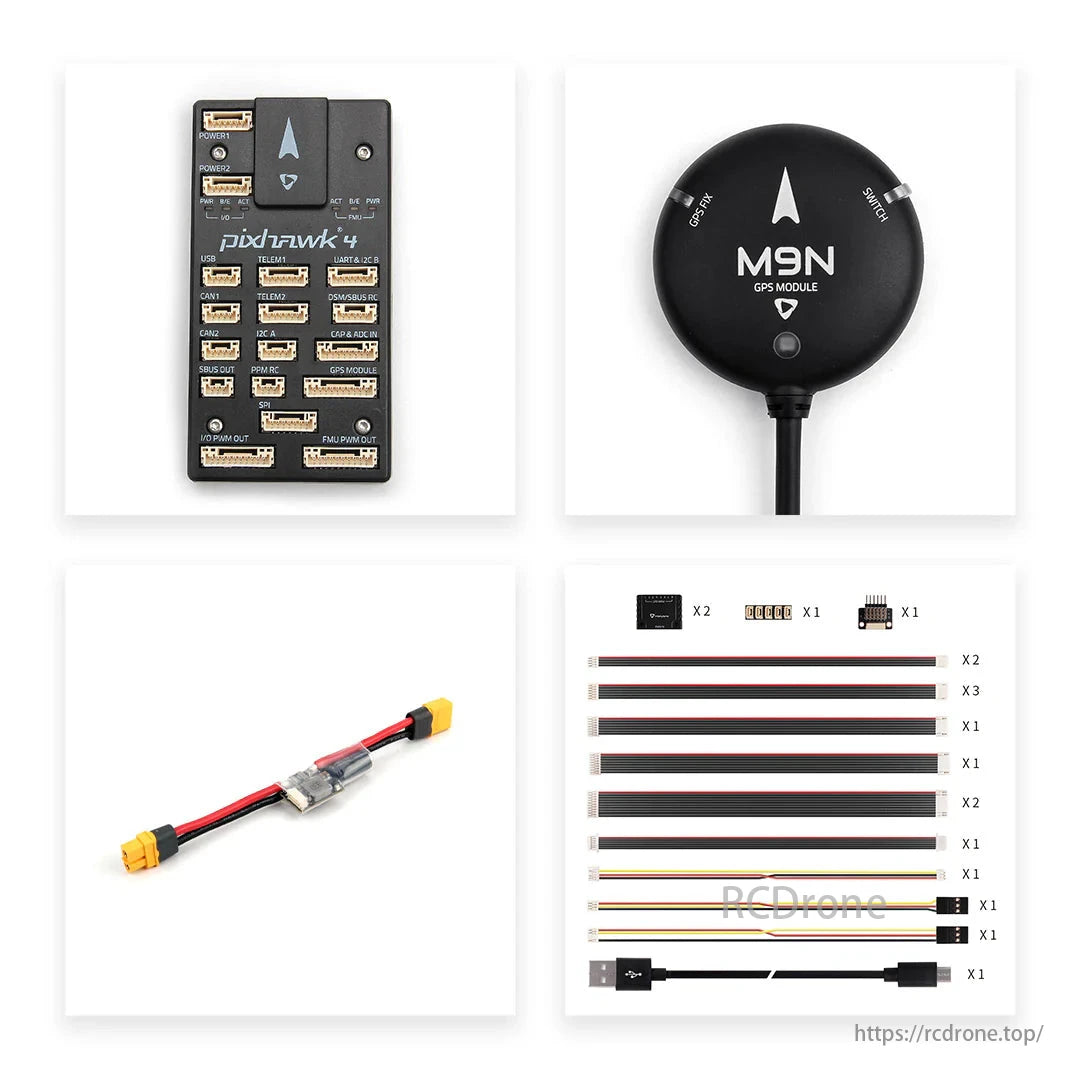
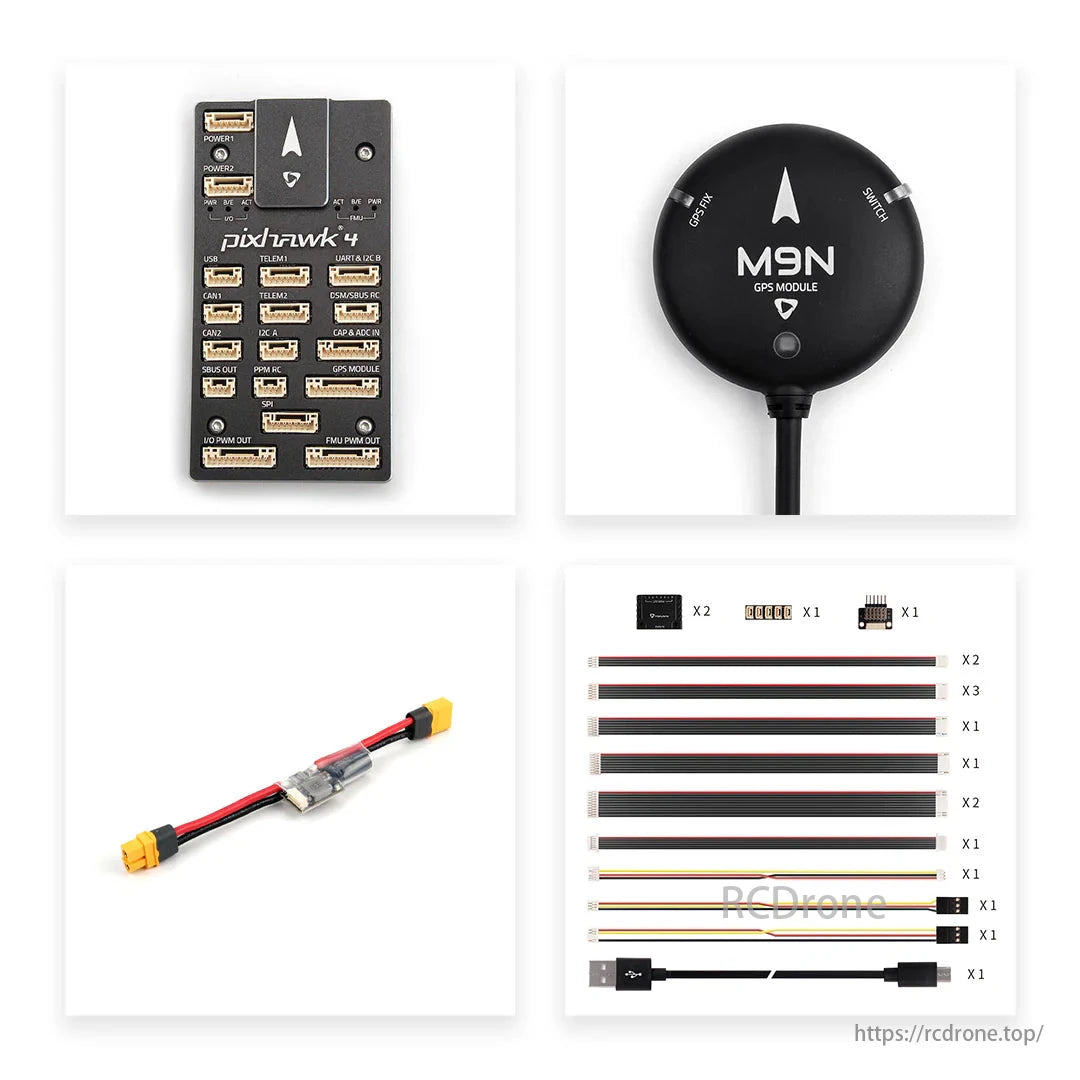
Controlador de vuelo Pixhawk 4 con varios puertos, incluidos USB, CAN, TELEM, UART, I2C, SBUS OUT, PPM RC, SPI y MÓDULO GPS.

Controlador de vuelo Pixhawk, impulsado por el sistema de piloto automático PX4.

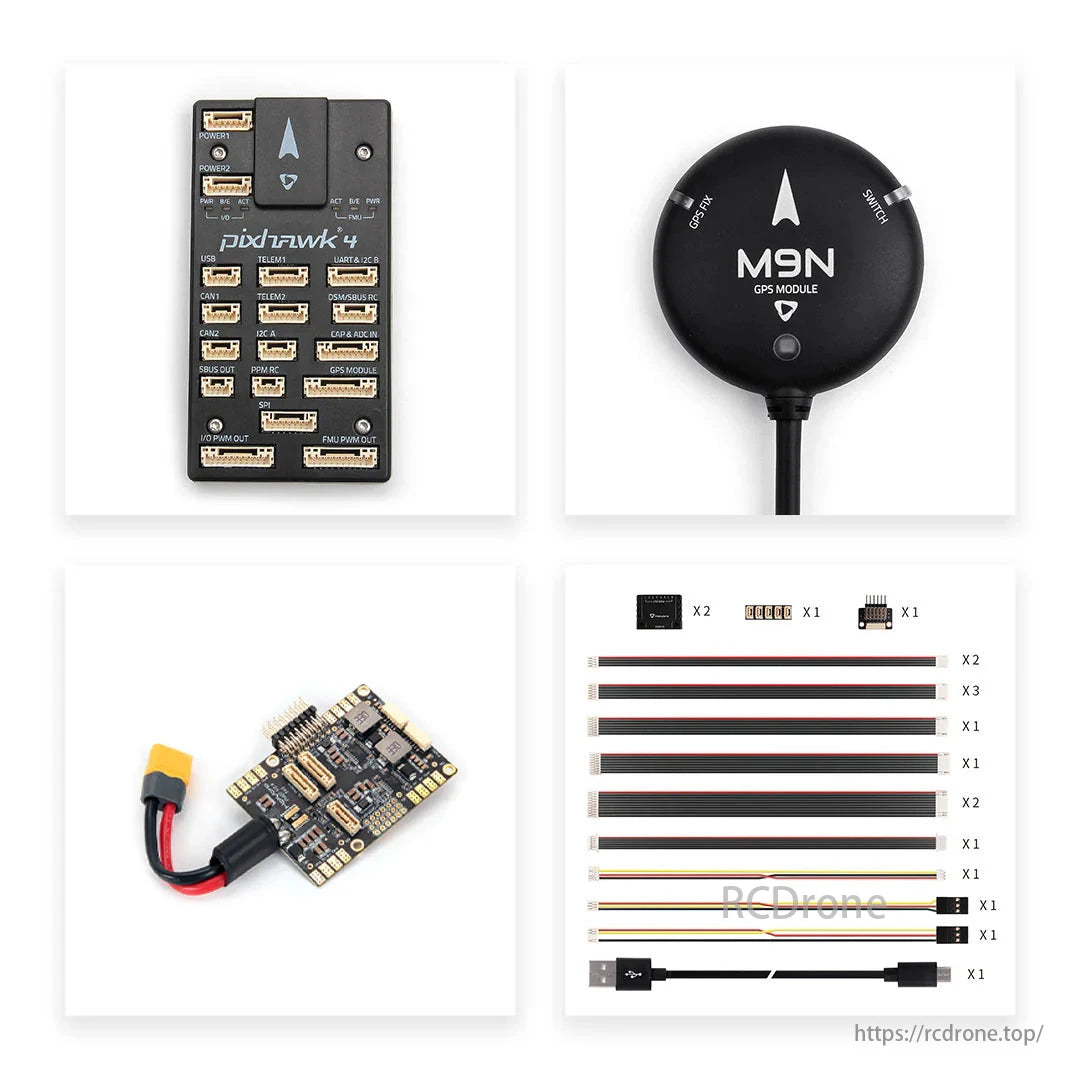
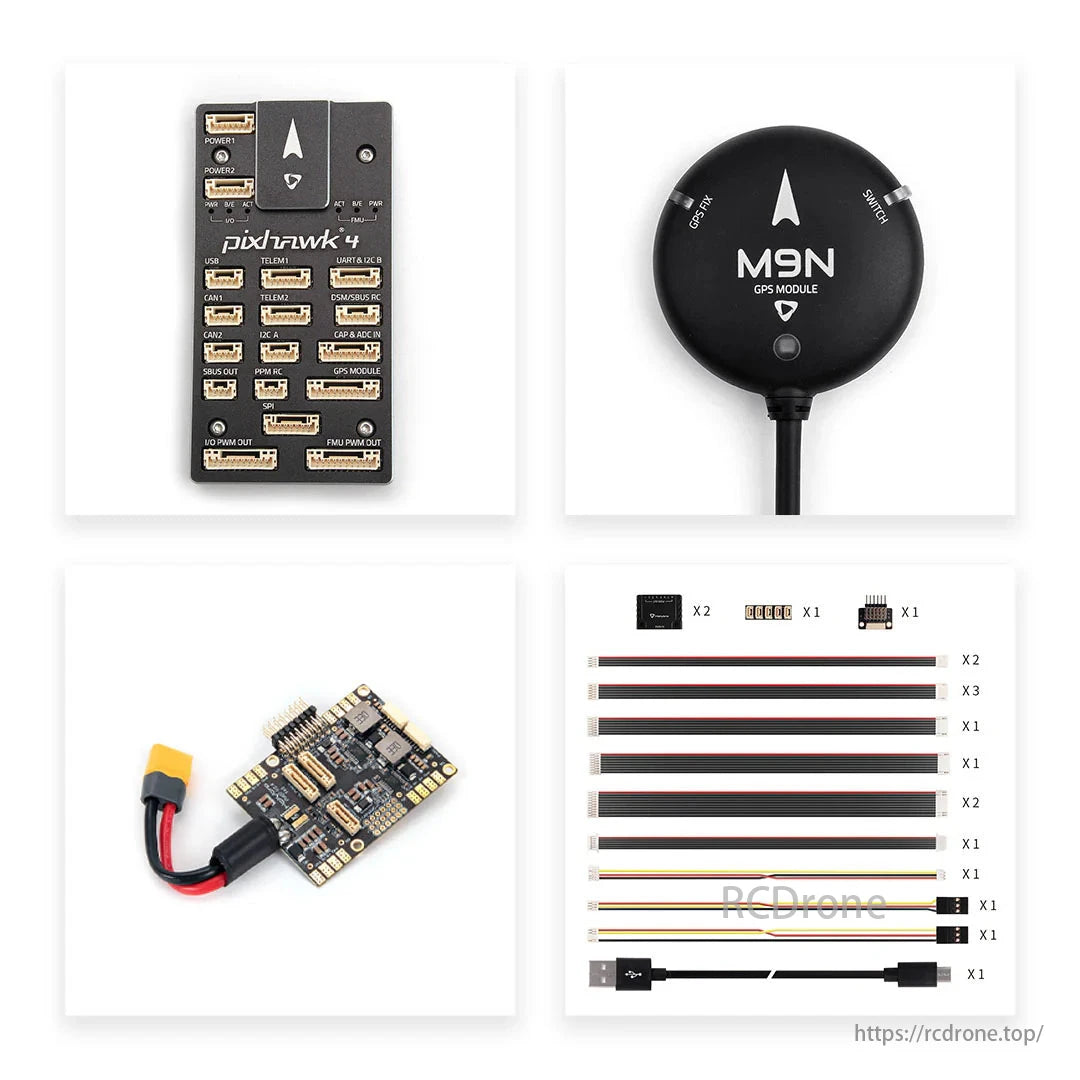
Controlador de vuelo Pixhawk 4, módulo GPS M9N, módulo de potencia con conector XT60 y varios cables para montaje de drones RC.

Controlador de vuelo Pixhawk 4 con varios puertos, incluidos USB, CAN y módulo GPS. Incluye un módulo de alimentación y varios cables para conexiones.

Controlador de vuelo Pixhawk 4, módulo GPS M9N, módulo de potencia con conector XT60 y varios cables para conexiones.
Related Collections