Controlador de vuelo con piloto automático Holybro Pixhawk 5X
Controlador de vuelo con piloto automático Holybro Pixhawk 5X
HolyBro
No se pudo cargar la disponibilidad de retiro
El Pixhawk® 5X es la última actualización de la exitosa familia de Halcón de PixieControladores de vuelo ®, basados en el estándar abierto Pixhawk® FMUv5X y el estándar de bus de piloto automático Pixhawk®. Viene con el último piloto automático PX4® preinstalado, con triple redundancia, control de temperatura y dominio de sensor aislado, que ofrece un rendimiento y una confiabilidad increíbles.
Dentro del Pixhawk® 5X, puede encontrar un STM32F7 basado en STMicroelectronics®, combinado con tecnología de sensores de Bosch®, InvenSense®, que le brinda flexibilidad y confiabilidad para controlar cualquier vehículo autónomo, adecuado tanto para aplicaciones académicas como comerciales. El microcontrolador F7 del Pixhawk® 5X tiene 2 MB de memoria flash y 512 KB de RAM. El piloto automático PX4 aprovecha la mayor potencia y RAM. Gracias a la potencia de procesamiento actualizada, los desarrolladores pueden ser más productivos y eficientes con su trabajo de desarrollo, lo que permite algoritmos y modelos complejos.
El estándar abierto FMUv5X incluye IMU de alto rendimiento y bajo nivel de ruido a bordo, diseñadas para una mejor estabilización. IMU triple redundante y barómetro doble redundante en buses separados. Cuando el piloto automático PX4 detecta una falla en un sensor, el sistema cambia sin problemas a otro para mantener la confiabilidad del control de vuelo.
Un LDO independiente alimenta cada conjunto de sensores con control de potencia independiente. Un aislamiento de vibraciones de nuevo diseño filtra las vibraciones de alta frecuencia y reduce el ruido para garantizar lecturas precisas, lo que permite que los vehículos alcancen un mejor rendimiento general de vuelo. El bus de sensor externo (SPI5) tiene dos líneas de selección de chip y señales de datos listos para sensores adicionales y carga útil con interfaz SPI, y con un PHY Ethernet Microchip integrado (LAN8742AI-CZ-TR), ahora se admite la comunicación de alta velocidad con las computadoras de la misión a través de Ethernet. Dos puertos de monitoreo de batería inteligente (SMBus), compatibilidad con el módulo de potencia SMBus INA226.
El Pixhawk® 5X es perfecto para desarrolladores en laboratorios de investigación corporativos, empresas emergentes, académicos (investigación, profesores, estudiantes) y aplicaciones comerciales. El Pixhawk 5X es compatible con ambos PX4 Piloto automático & Firmware de Ardupilot.
Nota:
- El Pixhawk 5X requiere el protocolo I2C para datos de voltaje y corriente del módulo de potencia como PM02D, el módulo de potencia analógico (PM02, PM06, PM07) no es compatible con Pixhawk 5X. Cuadro comparativo de módulos de potencia
- Se entrega con el firmware PX4 de manera predeterminada. El usuario también puede usar el firmware de Ardupilot actualizando el firmware a través de Mission Planner o QGroundControl.
Puntos clave de diseño
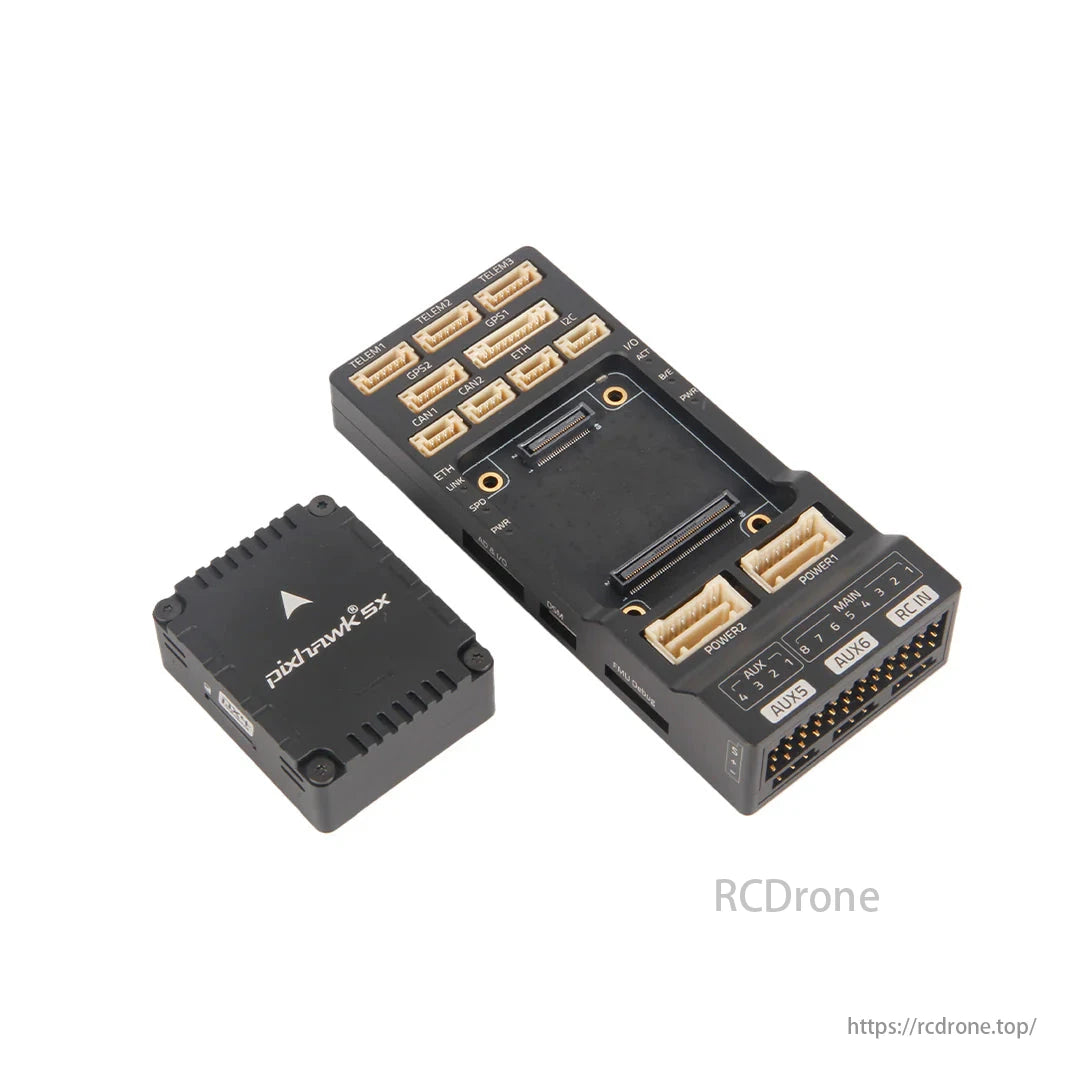
- Controlador de vuelo modular: IMU, FMU y sistema base separados conectados por un conector de bus de piloto automático Pixhawk® de 100 pines y uno de 50 pines, diseñado para sistemas flexibles y personalizables
- Redundancia: 3 sensores IMU y 2 sensores barométricos en buses separados, lo que permite un funcionamiento paralelo y continuo incluso en caso de fallo del hardware
- Dominios de triple redundancia: dominios de sensores completamente aislados con buses separados y control de potencia independiente
- Sistema de aislamiento de vibraciones para filtrar las vibraciones de alta frecuencia y reducir el ruido para garantizar lecturas precisas.
- Interfaz Ethernet para la integración de computadoras de misión de alta velocidad
- Calibración automática del sensor que elimina las variaciones de señales y temperatura.
- Las IMU están controladas por temperatura mediante resistencias de calentamiento integradas, lo que permite una temperatura de trabajo óptima de las IMU.
Especificaciones técnicas
- Procesador FMU: STM32F765
- Procesador Arm® Cortex®-M7 de 32 bits, 216 MHz, 2 MB de memoria, 512 KB de RAM
- Procesador de E/S: STM32F100
- Procesador ARM® Cortex®-M3 de 32 bits, 24 MHz, 8 KB de SRAM
- Sensores a bordo
- Acelerador/Giroscopio: ICM-20649 (montado en posición rígida)
- Acelerador/Giroscopio: ICM-42688P (montaje suave)
- Acelerador/Giroscopio: ICM-20602 o BMI088 (Montaje suave)
- Magnético: BMM150
- Barómetro: 2x BMP388
Datos eléctricos
- Clasificaciones de voltaje:
- Voltaje máximo de entrada: 6 V
- Entrada de alimentación USB: 4,75 ~ 5,25 V
- Entrada de riel servo: 0 ~ 36 V
Interfaces
- 16- Salidas servo PWM
- Entrada R/C para Spektrum / DSM
- Entrada R/C dedicada para entrada PPM y S.Bus
- Entrada analógica / PWM RSSI dedicada y S.Salida de bus
- 4 puertos seriales de propósito general
- 3 con control de flujo total
- 1 con límite de corriente independiente de 1 A
- 1 con I2C y línea GPIO adicional para lector NFC externo
- 2 puertos GPS
- 1 GPS completo más puerto de interruptor de seguridad
- 1 puerto GPS básico
- 1 puerto I2C
- 1 puerto Ethernet
- Aplicaciones sin transformador
- 100 Mbps
- 1 bus SPI
- 2 líneas de selección de chip
- 2 líneas preparadas para datos
- 1 línea SPI SYNC
- 1 línea de reinicio SPI
- 2 buses CAN para periféricos CAN
- CAN Bus tiene controles silenciosos individuales o control ESC RX-MUX
- 2 puertos de entrada de energía con SMBus
- 1 puerto AD y IO
- 2 entradas analógicas adicionales
- 1 entrada PWM/Captura
- 2 líneas de depuración y GPIO dedicadas
Datos mecánicos
- Dimensiones
- Módulo controlador de vuelo: 38,8 x 31,8 x 14,6 mm
- Mini zócalo: 43,4 x 72,8 x 14,2 mm
- Zócalo estándar v1: 52,4 x 103,4 x 16,7 mm
- Zócalo estándar v2A: 40,2 x 92,3 x 18,4 mm
- Zócalo estándar v2B: 40,2 x 98,3 x 16,9 mm
- Peso
- Módulo controlador de vuelo: 23 g
- Mini zócalo: 26.8 gramos
- Zócalo estándar v1: 51 g
- Zócalo estándar v2A: 58 g
- Zócalo estándar v2B: 58 g
El SKU 11045 incluye:
- Módulo controlador de vuelo Pixhawk 5X
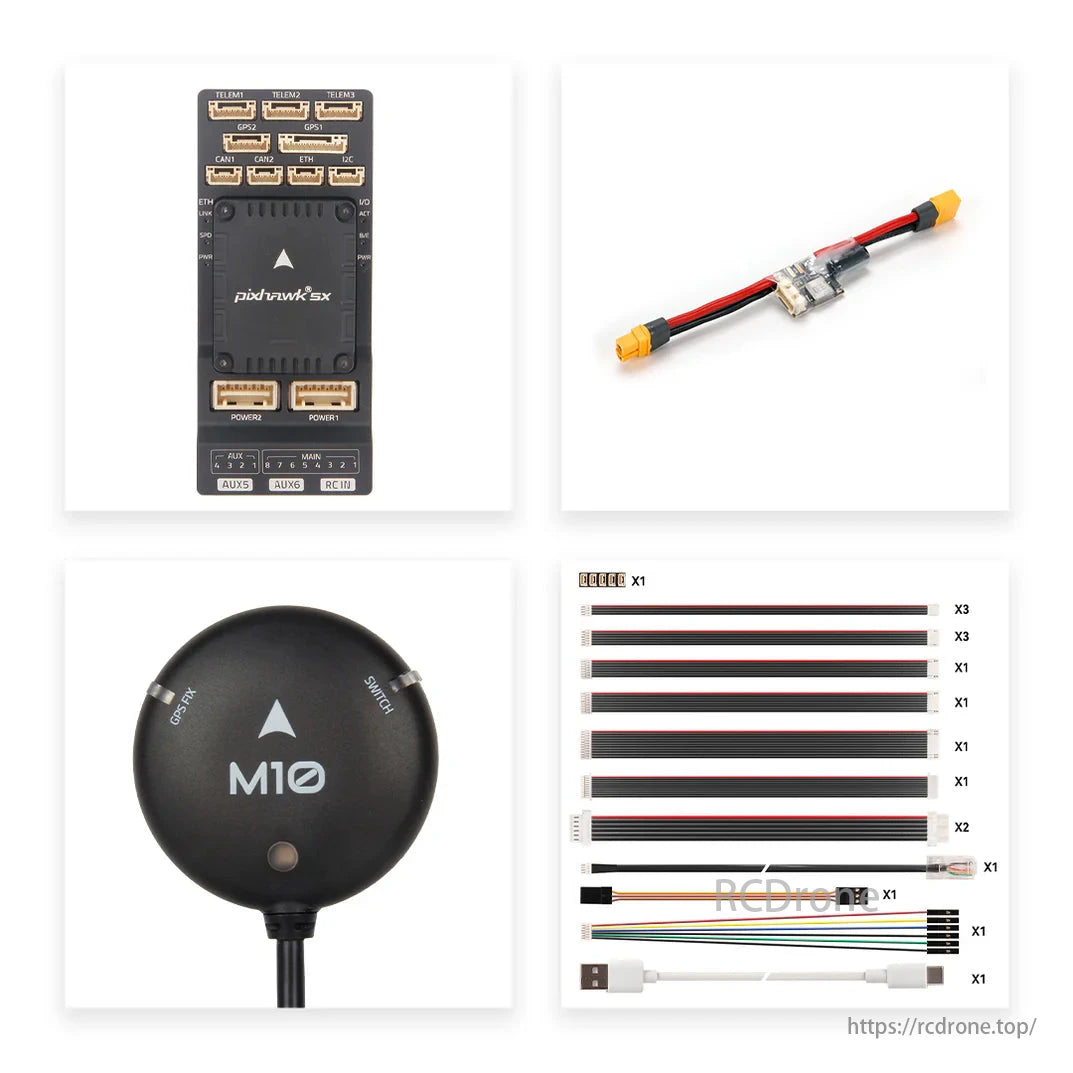
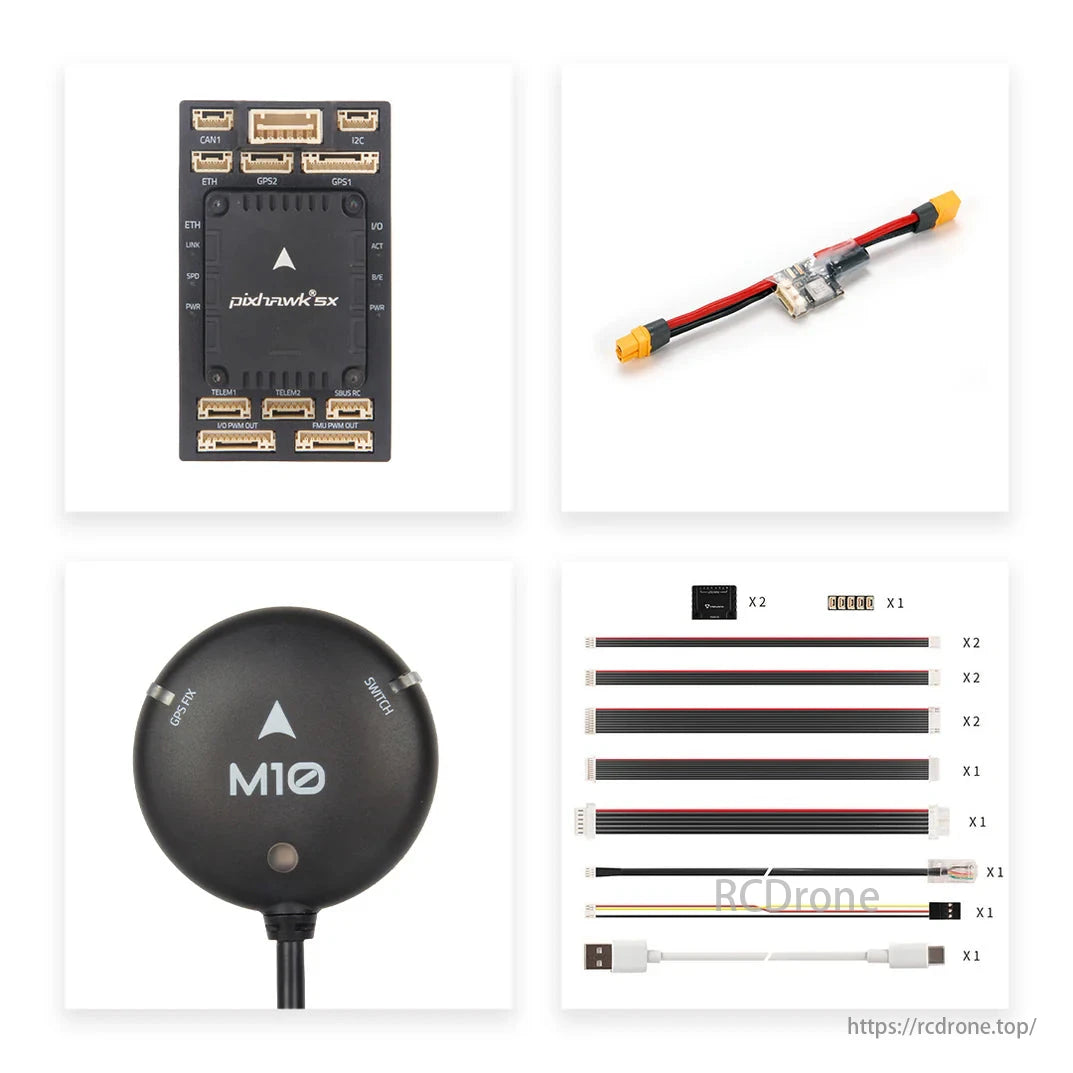
SKU 20307/SKU 20320/SKU20310 incluye:
- Módulo controlador de vuelo Pixhawk 6X
- Zócalo estándar v2A/v2B o mini zócalo
- Módulo de potencia de alto voltaje PM02D
- Juego de cables
- Módulo controlador de vuelo Pixhawk 6X
- Zócalo estándar v2A/v2B o mini zócalo
- Módulo de potencia de alto voltaje PM02D
- Juego de cables
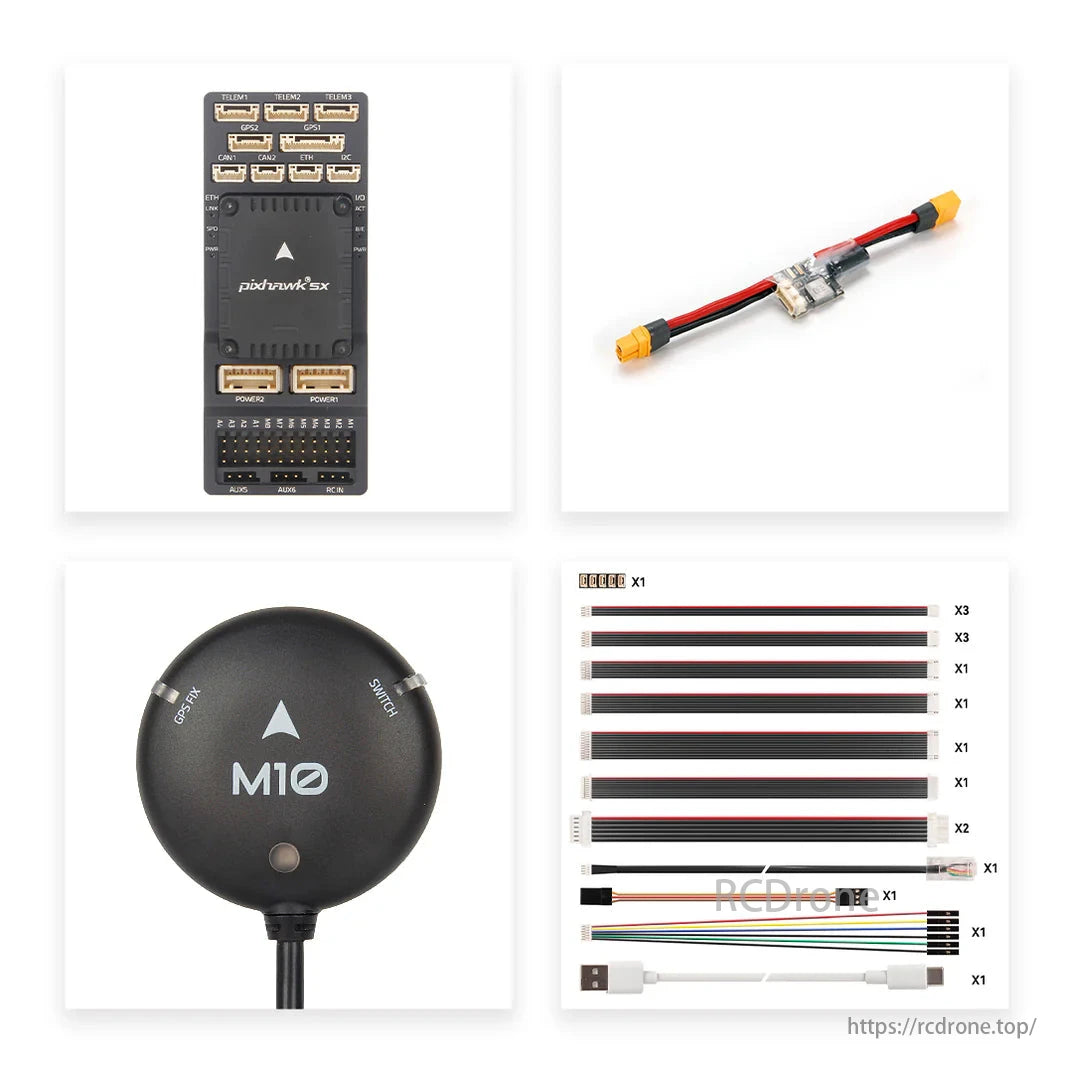
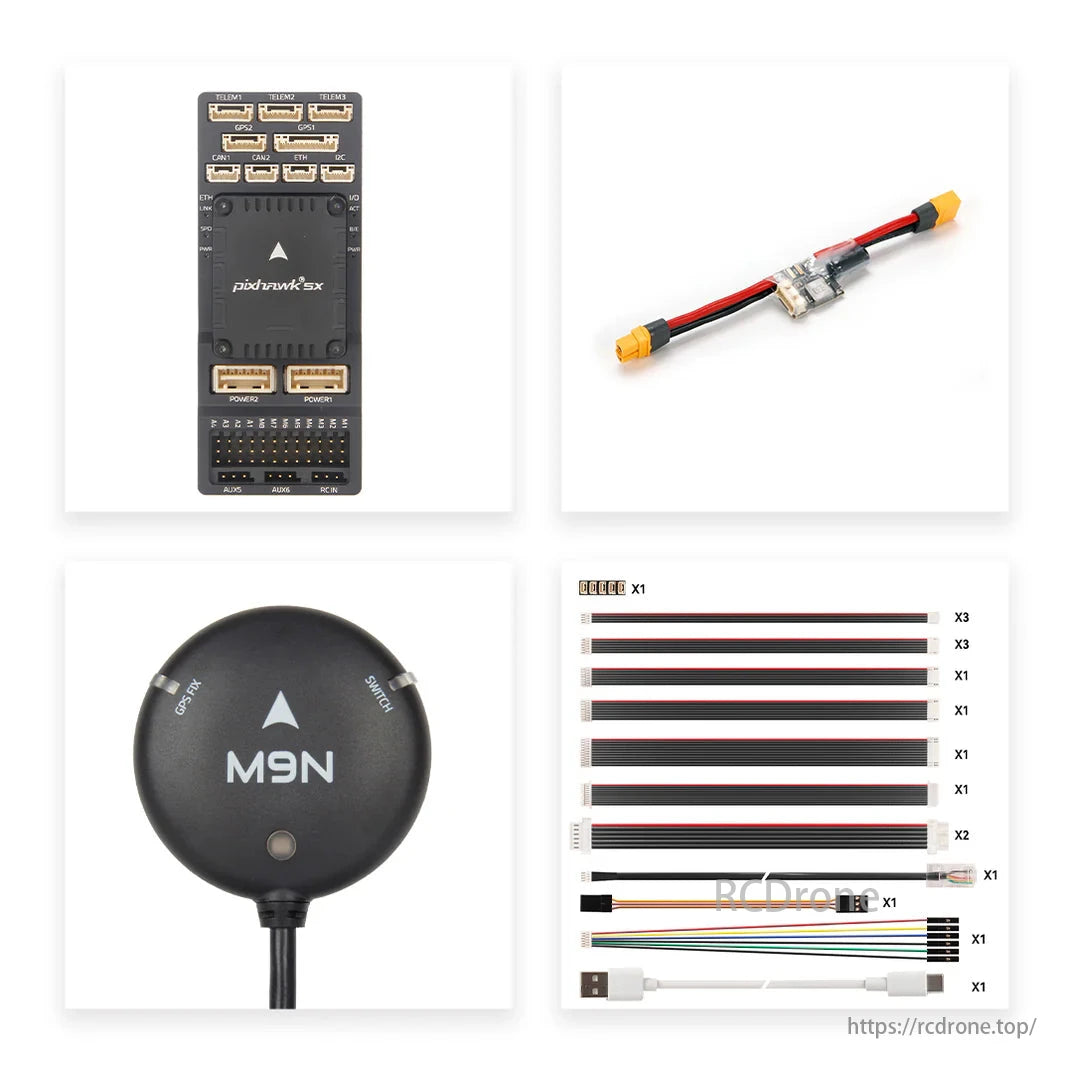
- M9N/M10 GPS
Se muestran las dimensiones de Pixhawk mini, Pixhawk Baseboard v1 y dos variantes de Pixhawk Baseboard v2 (v2A y v2B). La mini mide 43,4 x 72,8 mm, la v1 mide 52 x 101,90 mm, la v2A mide 40,2 x 92,3 mm y la v2B mide 40,2 x 98,3 mm.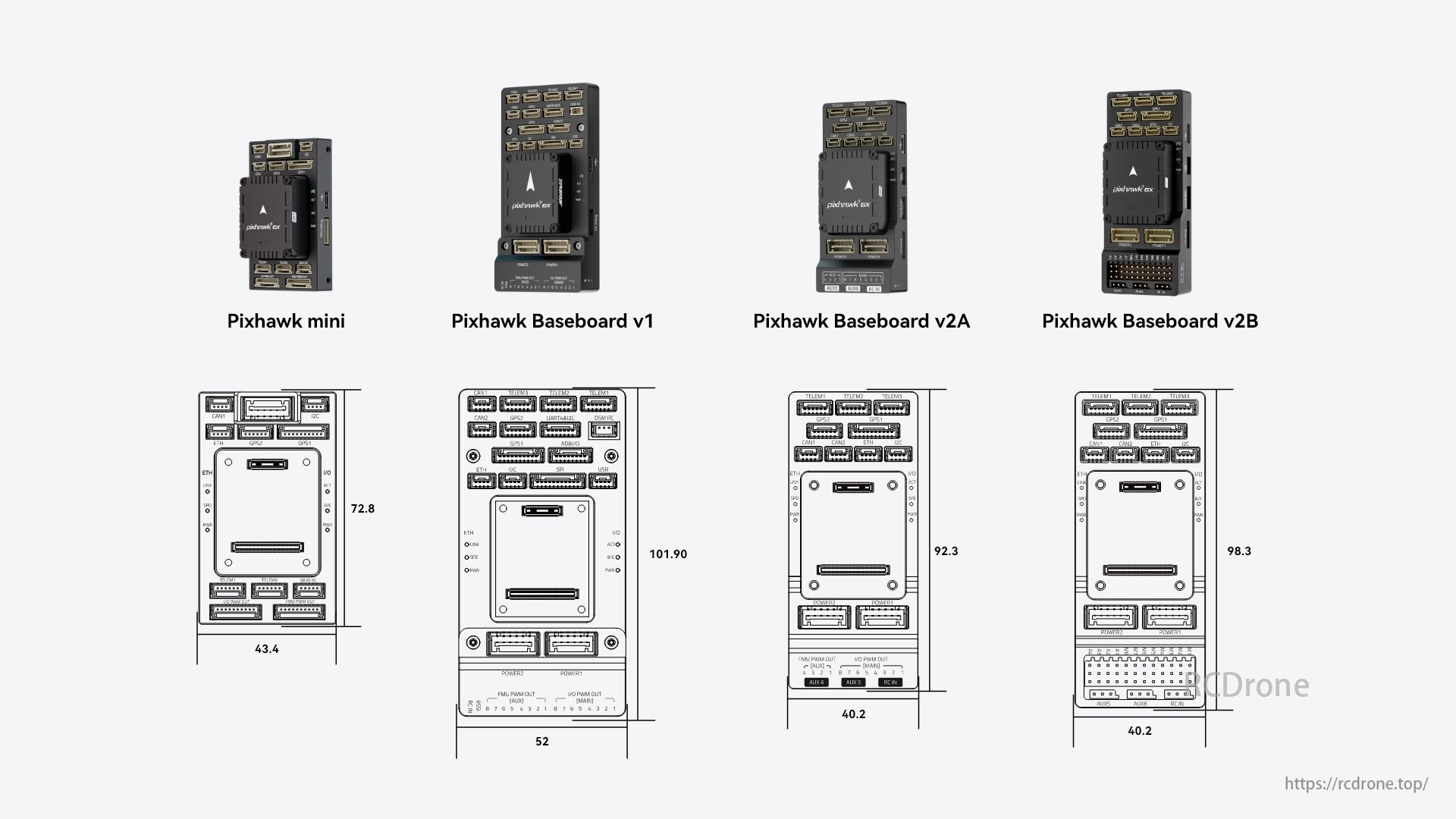
Guía de ejemplo de cableado

El diagrama de Holybro Pixhawk 5X incluye GPS primario y secundario, puertos UART4 e I2C, CAN1 y 2, receptor DSM RC, radio de telemetría, cámara IP HD FPV, batería, módulo de energía, ESC y una placa de distribución de energía.
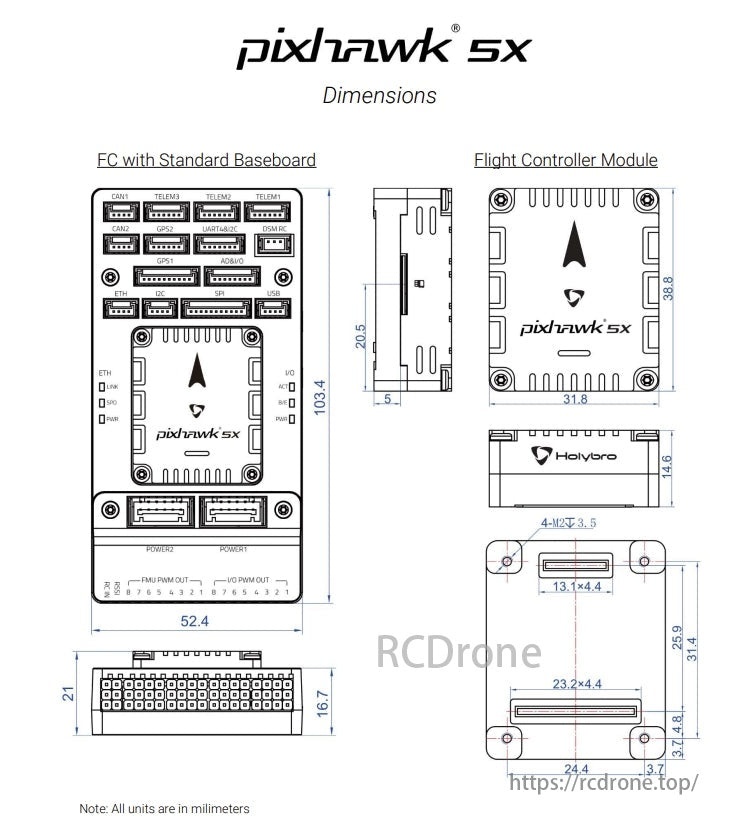
Las dimensiones del Pixhawk SX incluyen un módulo de control de vuelo y un FC con placa base estándar. El módulo mide 31,8 x 38,8 mm, mientras que la placa base mide 103,4 x 52,4 mm. Todas las unidades están en milímetros.

Dimensiones de la placa base estándar: 103,4 x 58 x 10,7 mm, con varios puertos y conectores que incluyen USB, Ethernet y entradas de alimentación.


Controlador de vuelo Pixhawk 5X con puertos TELEM1-3, GPS1-2, CAN1-2, ETH, I2C, POWER1-2, AUX5-6 y RC IN.
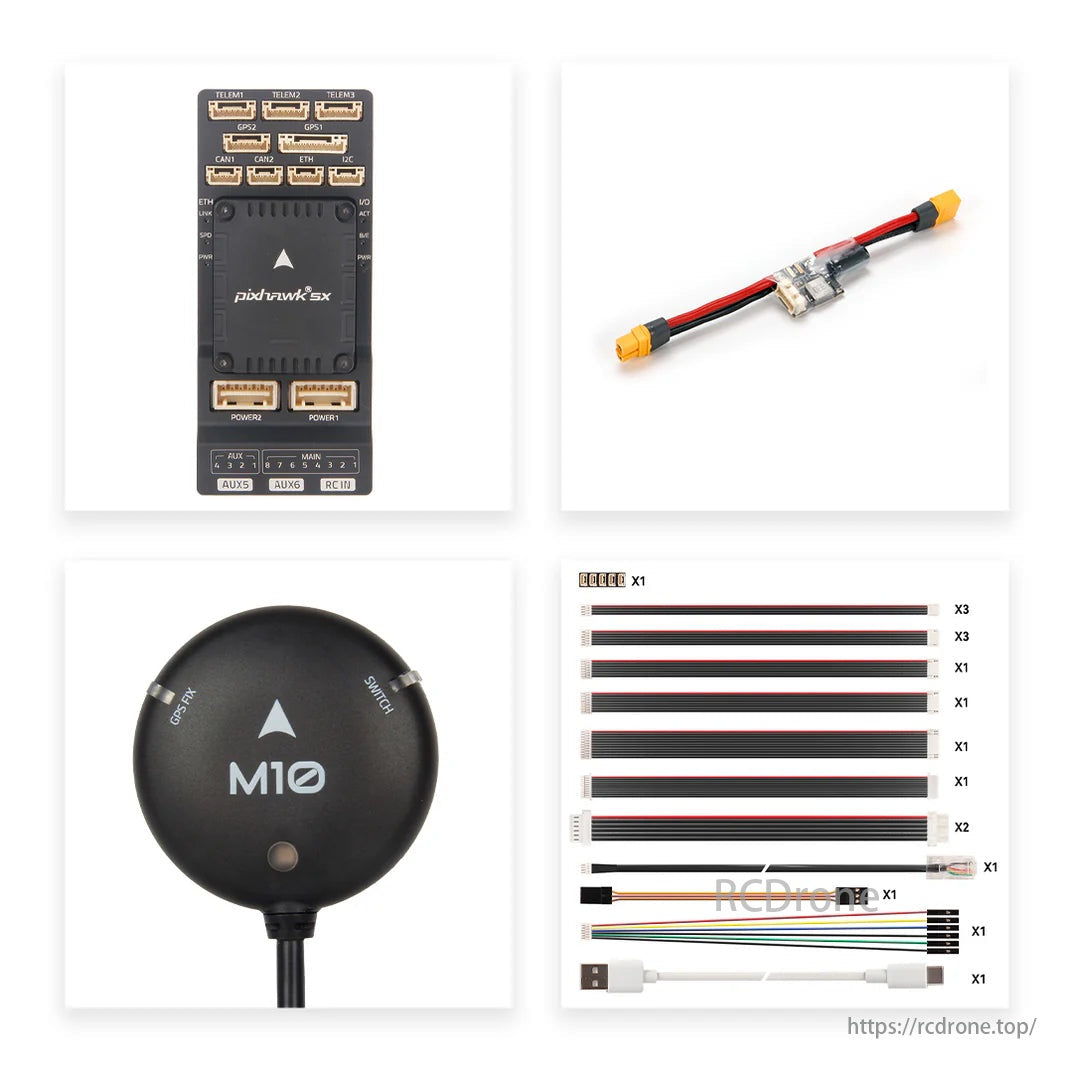
Controlador de vuelo Pixhawk 5X, módulo GPS M10, módulo de alimentación y varios cables para el montaje del dron.
Related Collections