Holybro Pixhawk 6X (ICM-45686) Controlador de Vuelo – IMU Triple Redundante, STM32H753, Ethernet, Compatible con PX4 y ArduPilot
Holybro Pixhawk 6X (ICM-45686) Controlador de Vuelo – IMU Triple Redundante, STM32H753, Ethernet, Compatible con PX4 y ArduPilot
HolyBro
No se pudo cargar la disponibilidad de retiro
Descripción
El Holybro Pixhawk 6X (ICM-45686) es un controlador de vuelo de piloto automático modular de alto rendimiento diseñado para aplicaciones de drones industriales y comerciales exigentes. Con IMUs ICM-45686 con triple redundancia que cuentan con tecnología BalancedGyro™, barómetros duales y un procesador STM32H753 que opera a 480 MHz, el Pixhawk 6X ofrece una fiabilidad inigualable, rendimiento en tiempo real y flexibilidad. Su arquitectura modular, avanzada aislación de vibraciones y interfaz Ethernet lo hacen ideal para sistemas UAV que requieren control robusto, precisión y adaptabilidad a la misión.
Características Clave
-
Redundancia Triple de IMU: 3x ICM-45686 IMUs (±32g) con tecnología BalancedGyro™ para navegación inercial tolerante a fallos
-
Duales Barómetros: ICP20100 y BMP388 para una mayor precisión en altitud
-
Procesador de Alta Velocidad: STM32H753 Cortex-M7, 480MHz, con 2MB Flash & 1MB RAM
-
Diseño Modular: Separa FMU, IMU y placa base, conectados a través de un bus Pixhawk® de 100 pines y 50 pines
-
Placa IMU Controlada por Temperatura: Asegura un rendimiento óptimo del sensor en diferentes rangos de temperatura
-
Integración de Ethernet: Soporta comunicación de alta velocidad con computadoras de misión
-
Soporte para Módulo de Potencia Digital: Proporciona mediciones de voltaje y corriente más precisas
Sistema de Aislamiento Avanzado: Material duradero, formulado a medida que proporciona un alto espectro de amortiguación de vibraciones
-
Compatibilidad de Firmware: Se envía con PX4 (v1.14.3+), soporta ArduPilot (v4.5.0+)
Especificaciones
Procesadores y Sensores
| Componente | Detalles |
|---|---|
| Procesador FMU | STM32H753, ARM Cortex-M7, 480MHz, 2MB Flash, 1MB RAM |
| Procesador IO | STM32F103, ARM Cortex-M3, 72MHz |
| Sensores IMU | 3x ICM-45686 (BalancedGyro™) |
| Barómetro | ICP20100 & BMP388 |
| Magnetómetro | BMM150 |
| Elemento Seguro | NXP SE050 Plug & Trust |
Parámetros Eléctricos
| Parámetro | Value |
|---|---|
| Voltaje de entrada máximo | 6V |
| Entrada de alimentación USB | 4.75~5.25V |
| Voltaje del riel del servo | 0~36V |
| Límite de corriente Telem1 & GPS2 | 1.5A combinado |
| Límite de corriente de otros puertos | 1.5A combinado |
| Voltaje de señal PWM | Predeterminado 3.3V (cambiable a 5V a través de resistor) |
| Temperatura de operación | -25°C a +85°C |
Dimensiones mecánicas y peso
| Componente | Dimensiones (mm) | Peso (g) |
|---|---|---|
| Controlador de vuelo | 38.8 x 31.8 x 16.8 | 31.3g |
| Placa base estándar | 52.4 x 102 x 16.7 | 72.5g |
| Mini Baseboard | 43.4 x 72.8 x 14.2 | 26.5g |
Compatibilidad de Firmware
-
PX4: Totalmente compatible desde la versión 1.14.3 en adelante
-
ArduPilot: Totalmente compatible desde la versión 4.5.0 y superior
-
Flasheo de firmware soportado a través de Mission Planner o QGroundControl
Aplicaciones
Ideal para integración en:
-
Drones industriales
-
Sistemas UAV comerciales
-
Aeronaves VTOL
-
Plataformas de investigación académica
-
Misiones de múltiples sensores y alta fiabilidad
Detalles

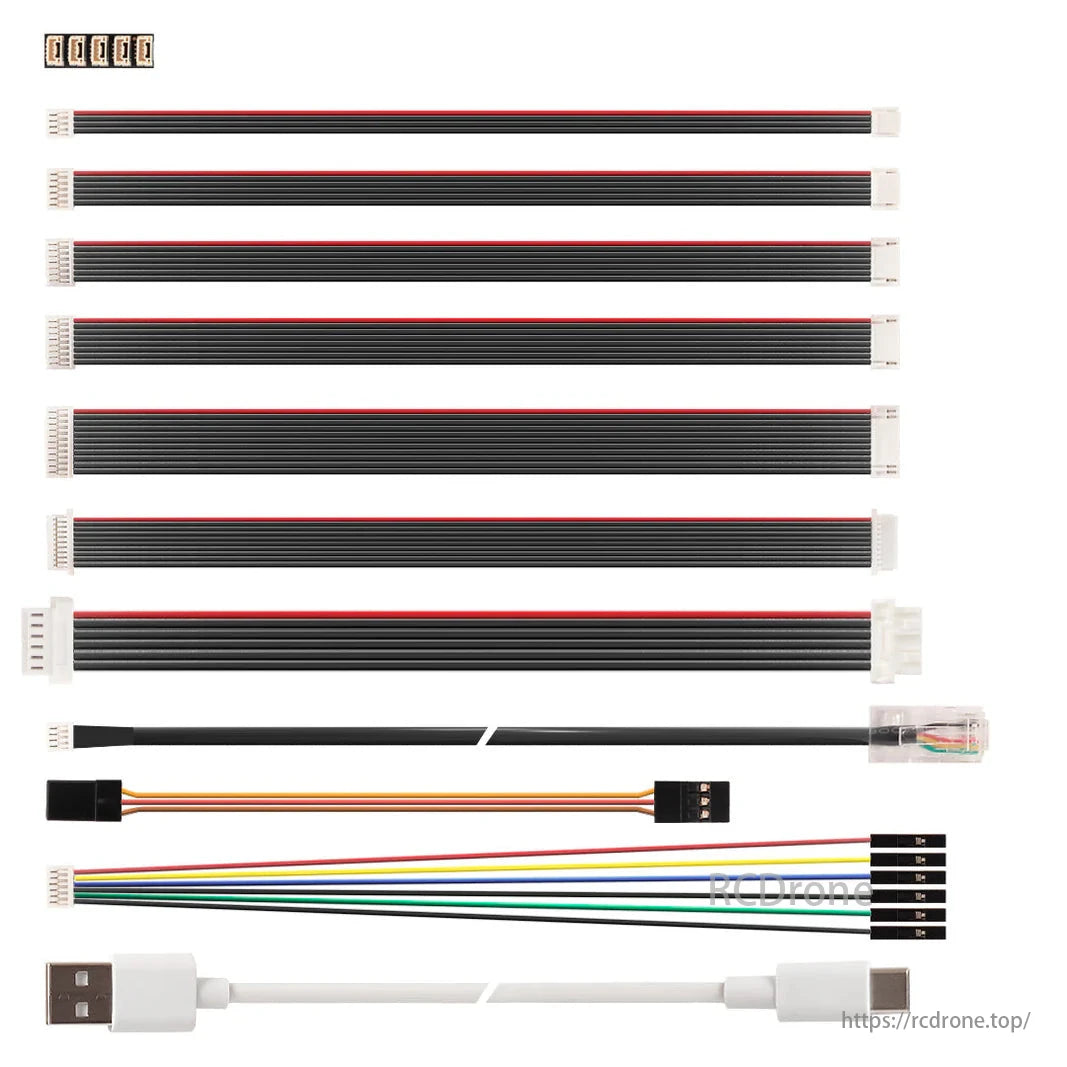
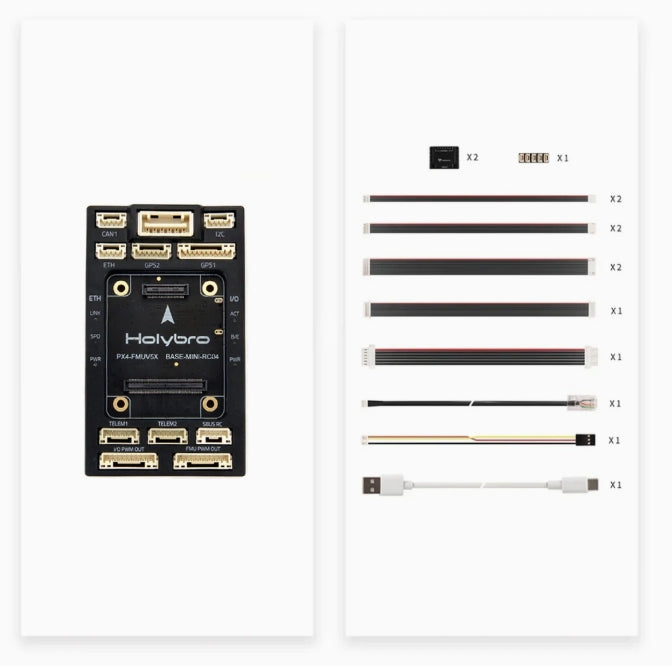
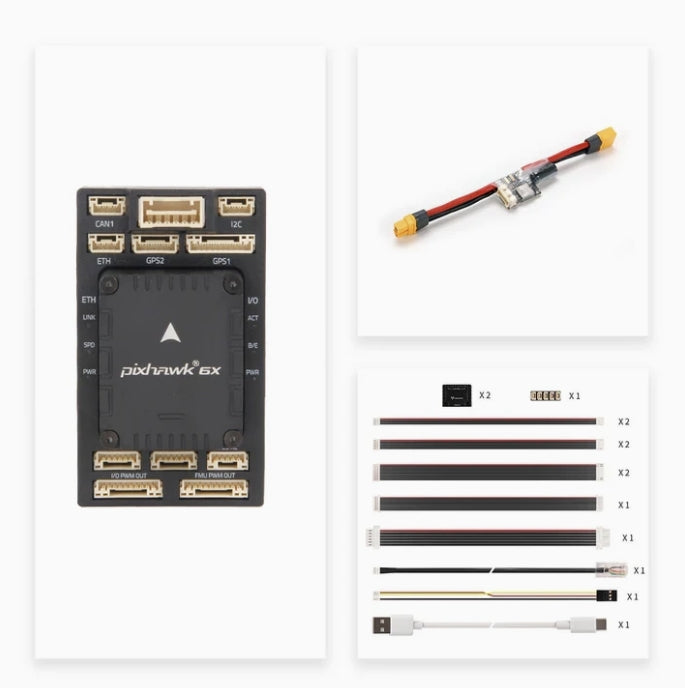
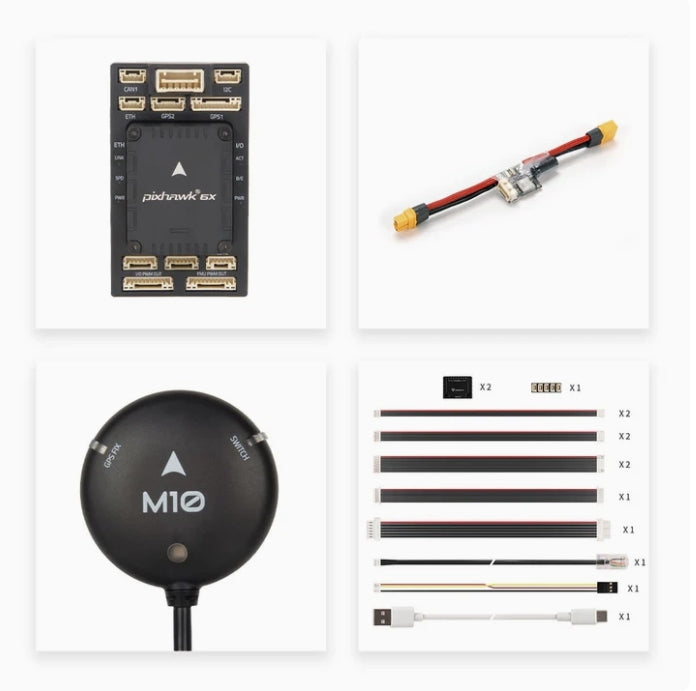
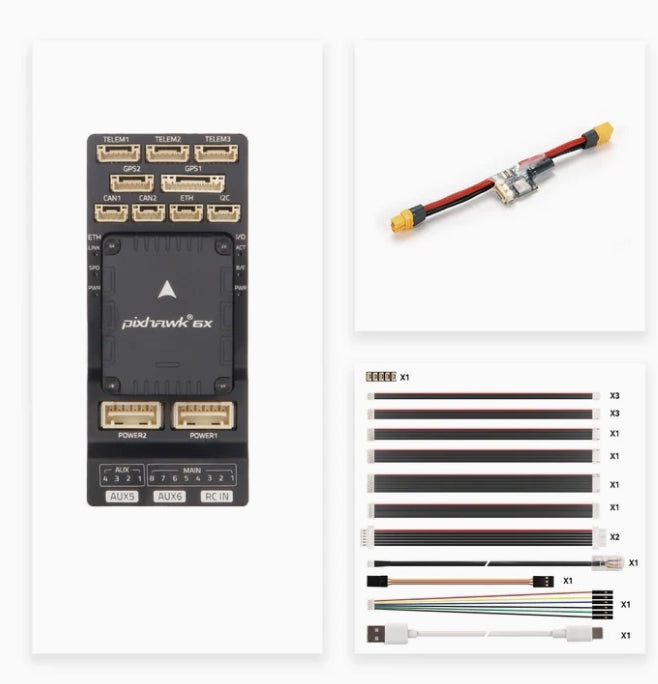
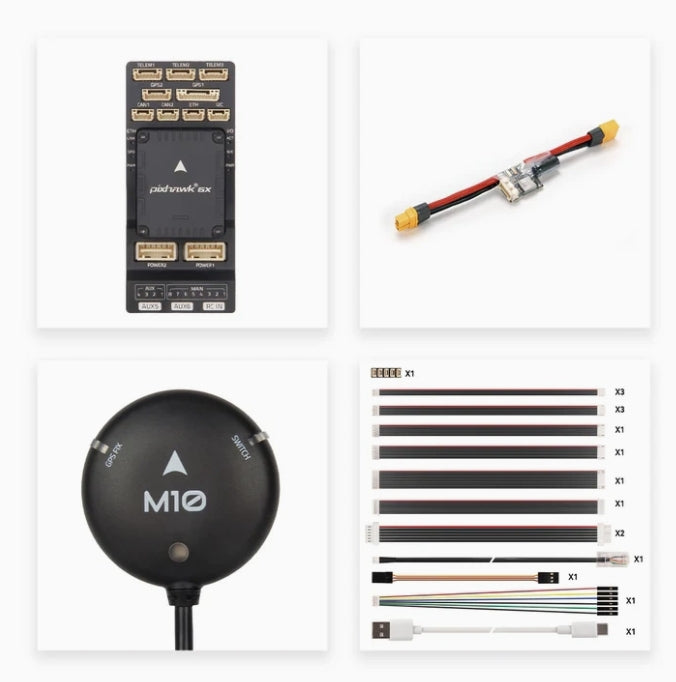
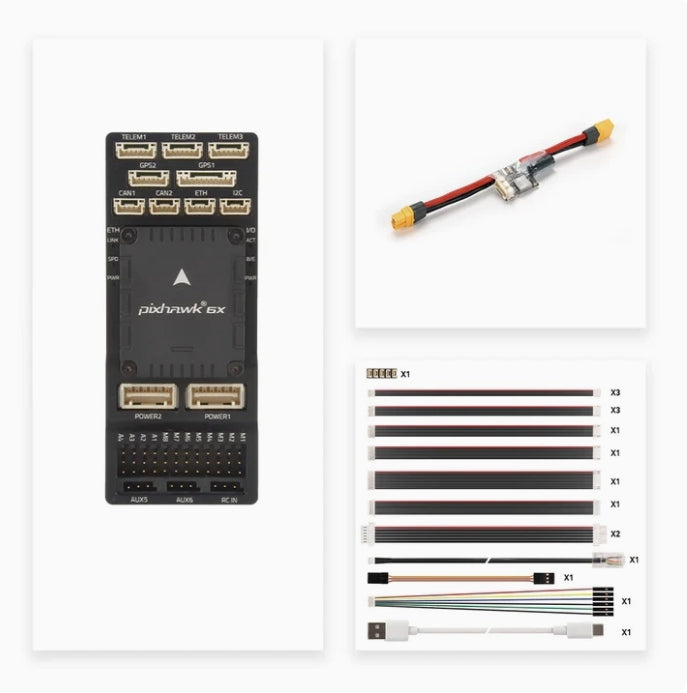
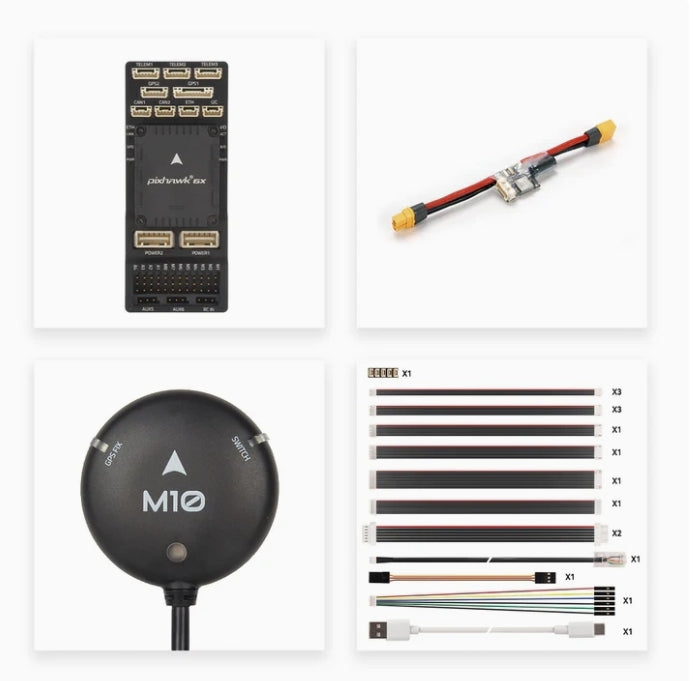
Pixhawk 6X ofrece un diseño más delgado con dos modelos. Presenta un conector de pines mejorado para una mejor conectividad y rendimiento, lo que lo hace ideal para aplicaciones avanzadas. Elija el modelo adecuado para sus necesidades.
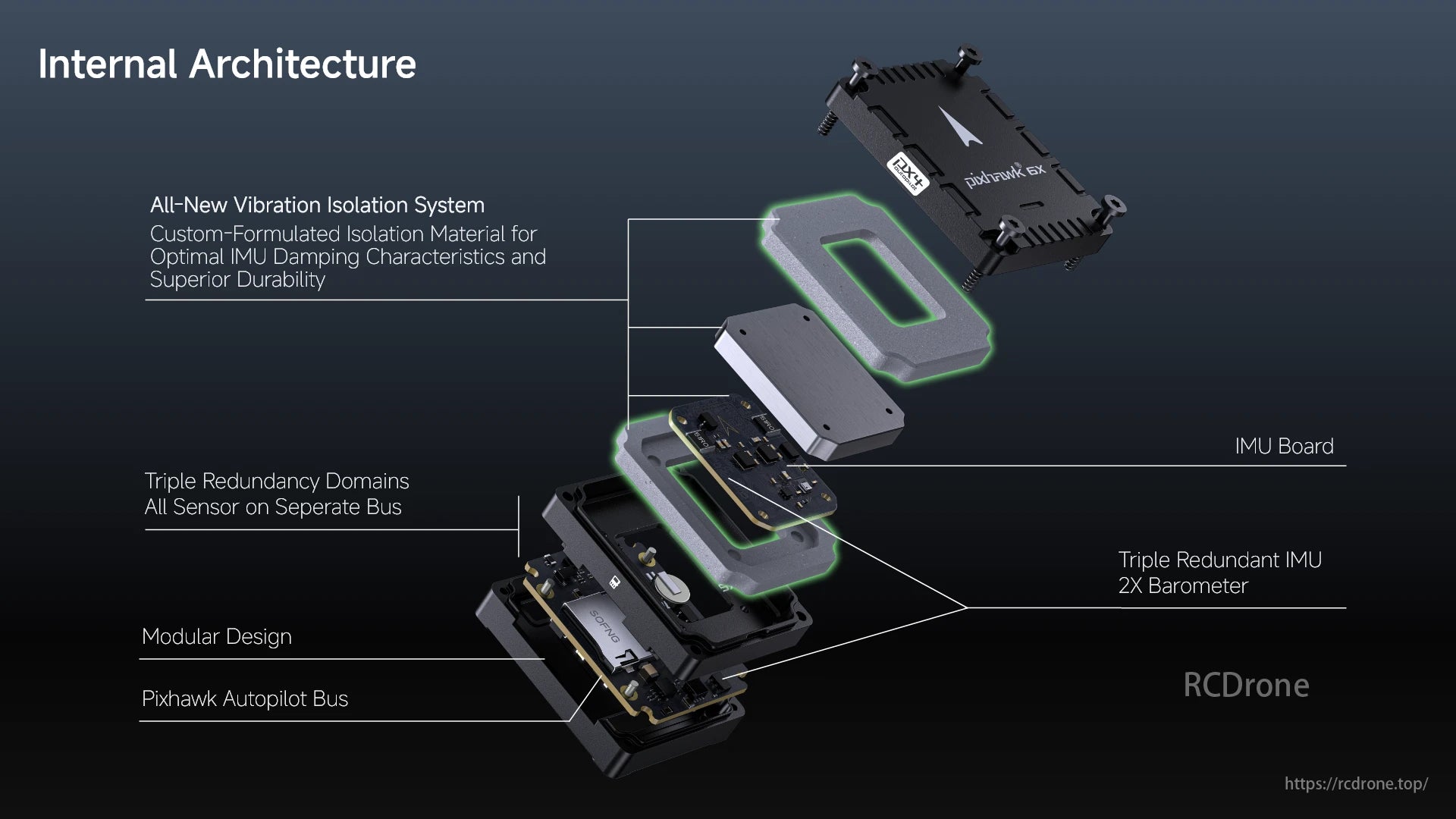
Holybro Pixhawk 6X ofrece aislamiento de vibraciones, triple redundancia, diseño modular, bus de piloto automático, placa IMU y 2x barómetros para un rendimiento avanzado.
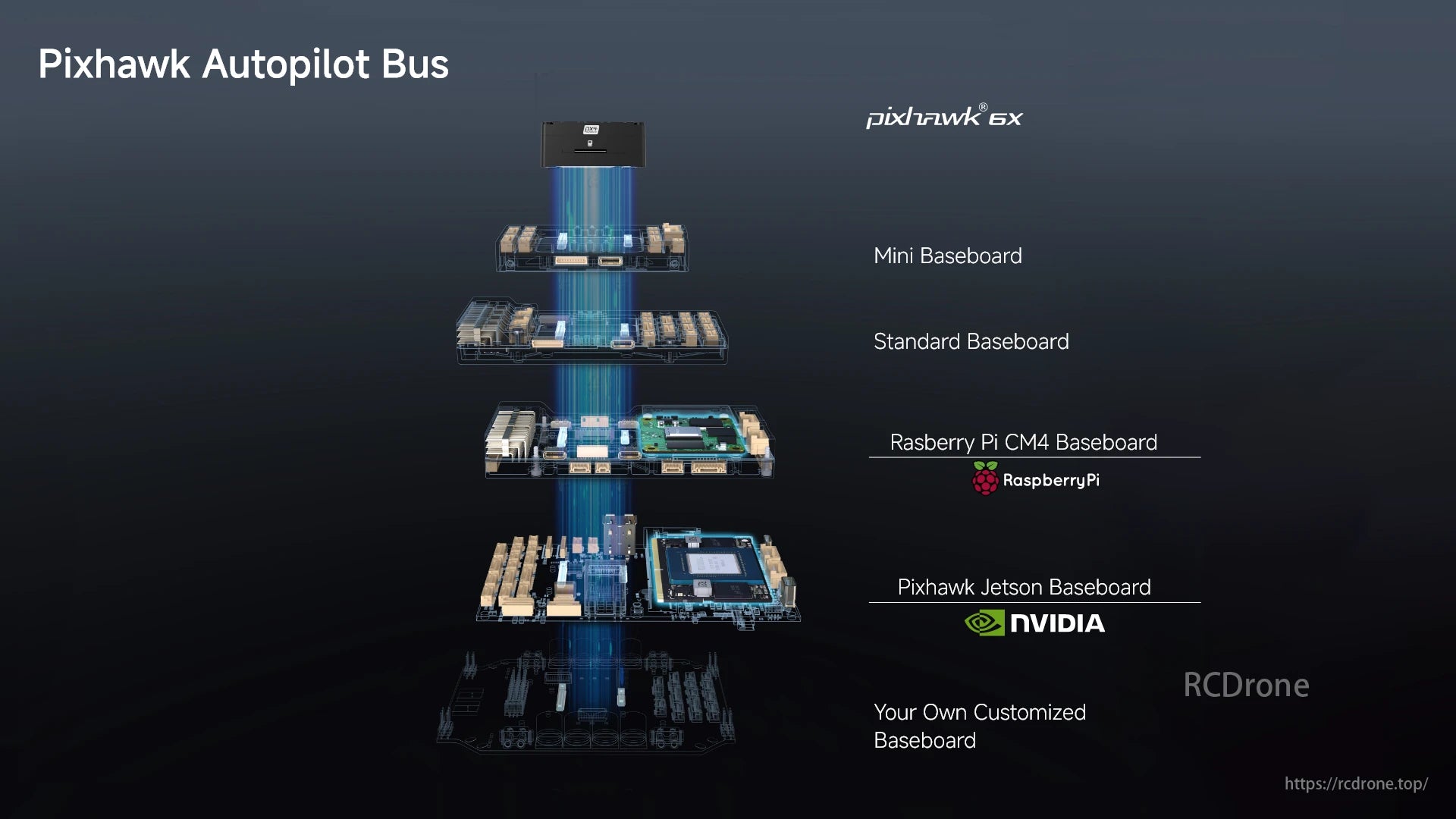
Pixhawk El bus de piloto automático incluye Pixhawk 6X, Mini Baseboard, Standard Baseboard, Raspberry Pi CM4 Baseboard, Jetson Baseboard y opciones personalizadas.

Los resistores de compensación de temperatura, IMU y barómetro redundantes, diversas tecnologías de sensores y material de aislamiento garantizan precisión.

El bus de piloto automático Pixhawk, procesador STM H753 de 32 bits (480 MHz), IMU Invensense ICM45686 con tecnología BalancedGyro y elemento seguro NXP EdgeLock SE050 están integrados en la placa FMU.
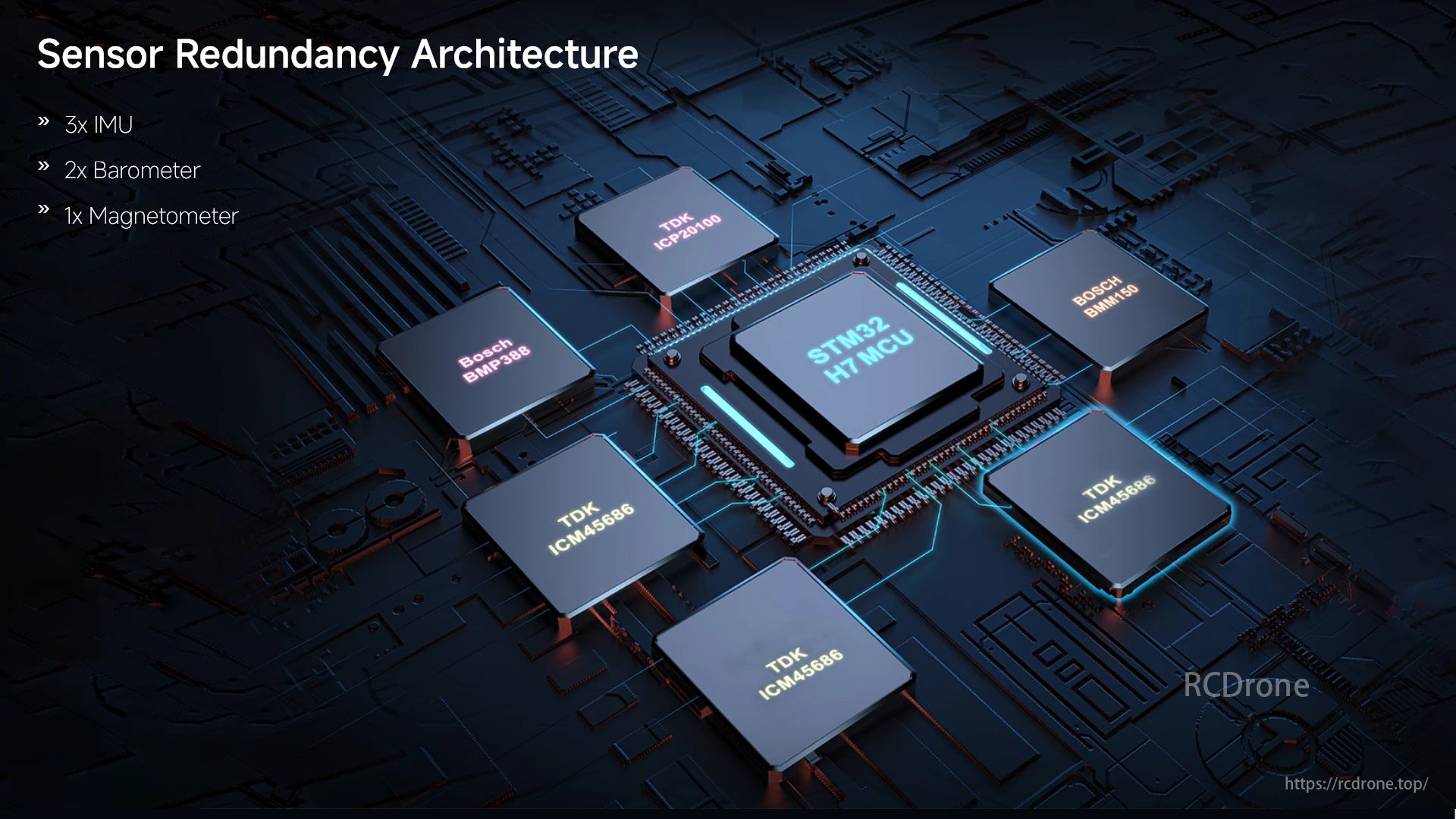
Arquitectura de redundancia de sensores con 3x IMU, 2x barómetros y 1x magnetómetro.Características del MCU STM32 H7, TDK ICM-45686, sensores Bosch BMP388 y BMM50 para un rendimiento mejorado.
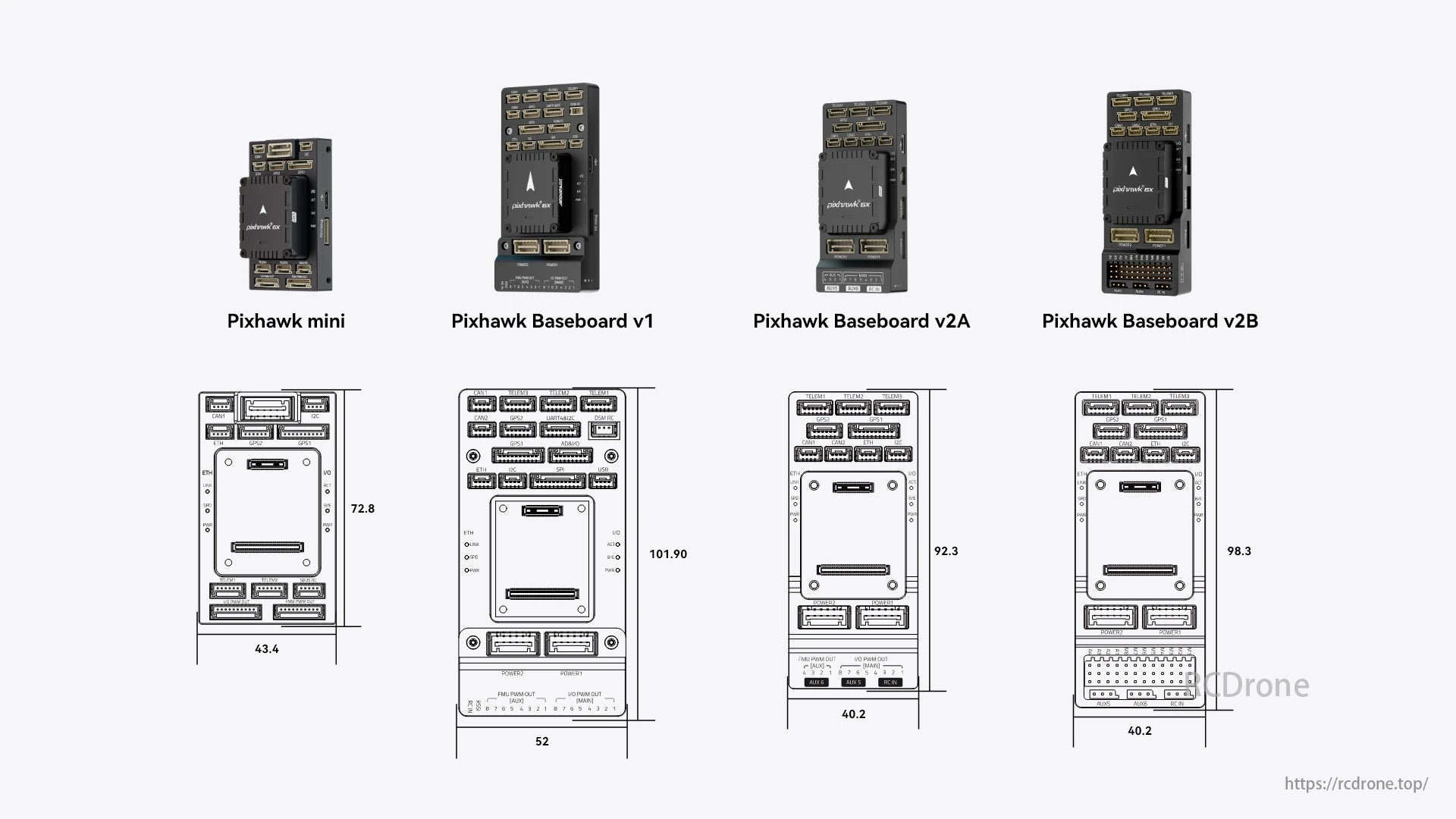
Controladores de vuelo Pixhawk mini, Baseboard v1, v2A y v2B con dimensiones: 43.4x72.8, 52x101.90, 40.2x92.3 y 40.2x98.3 respectivamente. Varios puertos y conectores son visibles en cada modelo.
Related Collections