Holybro Pixhawk 6X piloto automático H753 módulo controlador de vuelo Base estándar/Mini Base PM02D M9N M10 GPS RC aviones Multirotor
Holybro Pixhawk 6X piloto automático H753 módulo controlador de vuelo Base estándar/Mini Base PM02D M9N M10 GPS RC aviones Multirotor
HolyBro
No se pudo cargar la disponibilidad de retiro
Módulo controlador de vuelo Holybro Pixhawk 6X Autopilot H753 para drones y aviones multirotor
El controlador de vuelo con piloto automático Pixhawk 6X H753 de Holybro es un controlador de vuelo modular avanzado diseñado para drones multirotor y aviones de ala fija comerciales e industriales. Con tecnología de vanguardia y una variedad de configuraciones, el Pixhawk 6X ofrece un rendimiento y una confiabilidad incomparables para aplicaciones exigentes.
Características principales
1. Redundancia avanzada y tecnología BalancedGyro™
El Pixhawk 6X incorpora redundancia triple con tres sensores IMU ICM-45686 (±32 g) y dos sensores barométricos. Estos sensores están completamente aislados y funcionan en buses separados con control de potencia independiente, lo que garantiza la confiabilidad en misiones críticas. La tecnología BalancedGyro™ optimiza la precisión y la estabilidad del sensor.
2. Procesador de alto rendimiento
Equipado con un procesador STM32H753 con una velocidad de reloj de hasta 480 MHz, el controlador de vuelo ofrece capacidades computacionales excepcionales. Incluye 2 MB de memoria flash y 1 MB de RAM para una ejecución de misiones sin inconvenientes.
3. Diseño modular
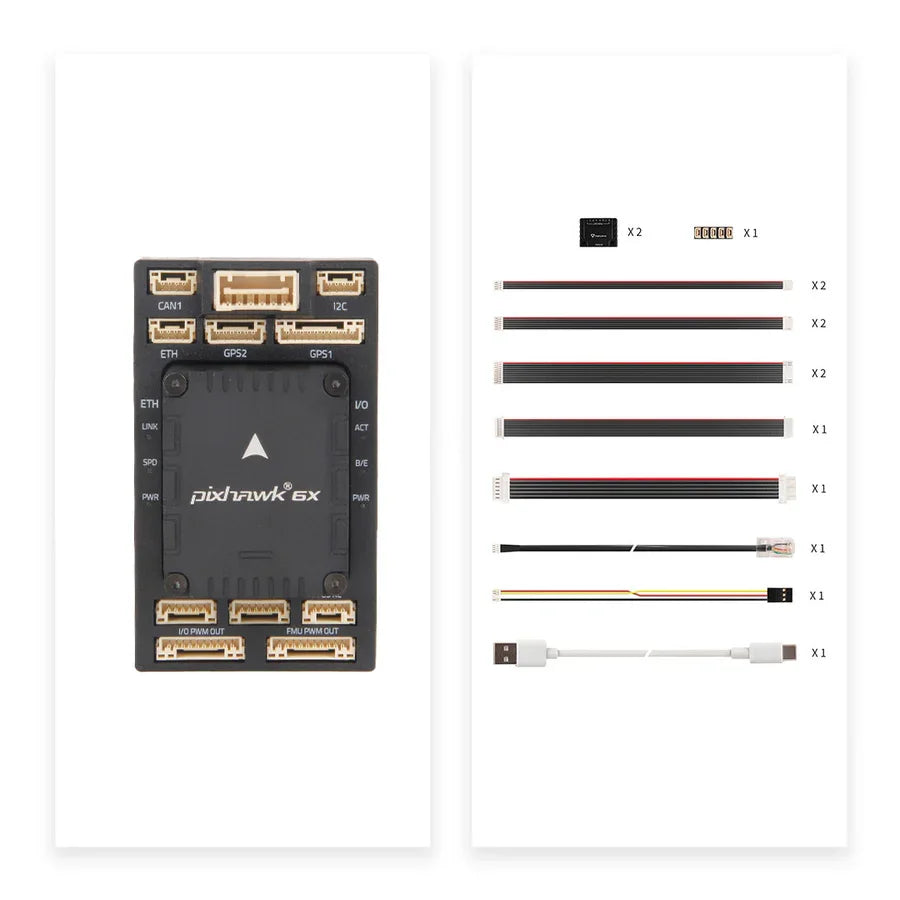
El Pixhawk 6X presenta un diseño modular con sistemas de IMU, FMU y base separados. Estos componentes están interconectados a través de un conector de bus de piloto automático Pixhawk® de 100 pines y otro de 50 pines, lo que permite una personalización y un mantenimiento flexibles.
4. Nuevo sistema de aislamiento de vibraciones
Al utilizar un material de aislamiento de vibraciones duradero y formulado a medida, el innovador sistema de amortiguación del Pixhawk 6X garantiza un rendimiento óptimo de la IMU con frecuencias de resonancia en el espectro más alto, lo que lo hace ideal para aplicaciones industriales y comerciales.
5. Interfaz Ethernet
Una interfaz Ethernet admite la integración de computadoras de misión de alta velocidad, lo que posibilita un intercambio de datos sin inconvenientes para un control de misión avanzado.
6. Placa IMU con control de temperatura
La placa IMU funciona dentro de un rango de temperatura óptimo, lo que garantiza un rendimiento constante incluso en entornos difíciles.
7. Amplia compatibilidad de firmware
La versión Rev 8 es compatible con el firmware PX4 (1.14.3 o posterior) y el firmware Ardupilot (4.5.0 o posterior). Los usuarios pueden actualizar el firmware a través de Mission Planner o QGroundControl para adaptarlo a sus requisitos específicos.
Configuraciones
El Holybro Pixhawk 6X está disponible en varias configuraciones para satisfacer diversas necesidades:
-
Zócalo estándar: Dimensiones: 52,4 x 102 x 16,7 mm; Peso: 72,5 g (aluminio)
-
Mini zócalo:Dimensiones: 43,4 x 72,8 x 14,2 mm; Peso: 26.5g
-
Módulos GPS opcionales: M9N, M10 GPS para una navegación precisa
-
Módulos de potencia: PM02D para un suministro de energía confiable
Presupuesto
Procesadores y sensores:
-
Procesador FMU: STM32H753 32 bits Arm® Cortex®-M7, 480 MHz, memoria flash de 2 MB, 1 MB de RAM
-
Procesador IO: STM32F103 ARM® Cortex®-M3 de 32 bits, 72 MHz, 64 KB de SRAM
-
Sensores IMU: 3x ICM-45686 con tecnología BalancedGyro™
-
Barómetros: ICP20100 y BMP388
-
Magnetómetro: BMM150
-
Elemento seguro: Hardware NXP EdgeLock SE050 Plug & Trust
Datos eléctricos:
-
Clasificaciones de voltaje:
-
Voltaje máximo de entrada: 6 V
-
Entrada de alimentación USB: 4,75 ~ 5,25 V
-
Entrada de riel servo: 0 ~ 36 V
-
-
Calificaciones actuales:
-
Limitador de corriente de salida Telem1: 1,5 A
-
Limitador de corriente de salida combinada de todos los demás puertos: 1,5 A
-
-
Voltaje de señal PWM: Predeterminado 3,3 V (ajustable a 5 V con modificación de resistencia incorporada)
Datos mecánicos:
-
Dimensiones del módulo controlador de vuelo: 38,8 x 31,8 x 16,8 mm; Peso: 31,3 g
-
Opciones de rodapié:
-
Zócalo estándar: 52,4 x 102 x 16,7 mm; Peso: 72,5 g
-
Mini zócalo: 43,4 x 72,8 x 14,2 mm; Peso: 26,5 g
-
Aplicaciones
El Holybro Pixhawk 6X está diseñado para:
-
Drones multirotor industriales y comerciales
-
Navegación en avión de ala fija
-
Control de misión avanzado con integración de datos de alta velocidad
Ya sea que esté construyendo un multirotor personalizado o mejorando un sistema de ala fija, el piloto automático Holybro Pixhawk 6X ofrece una solución versátil, robusta y confiable. Su diseño modular, tecnología avanzada y múltiples opciones de configuración garantizan que satisfaga las necesidades de cualquier aplicación profesional.
Related Collections