Controlador de vuelo con piloto automático Holybro Pixhawk 6X Pro
Controlador de vuelo con piloto automático Holybro Pixhawk 6X Pro
HolyBro
No se pudo cargar la disponibilidad de retiro
Punto clave del diseño
- IMU industrial ADIS16470 de alto rendimiento con alto rango dinámico del acelerómetro (±40 g), perfecto para Detección precisa de movimiento en aplicaciones UAV exigentes
- Nuevo material avanzado de aislamiento de vibraciones duradero con frecuencia de resonancia en el espectro más alto, ideal para aplicaciones de drones industriales y comerciales.
- IMU triple redundante y barómetro doble redundante en buses separados
- Procesador STM32H753 de alto rendimiento
- Controlador de vuelo modular: IMU, FMU y sistema base separados
- El diseño orientado a la seguridad incorpora sensores de diferentes fabricantes y líneas de modelos.
- El LDO independiente alimenta cada sensor con control de potencia independiente.
- Interfaz Ethernet para integración de computadoras de misión de alta velocidad. Se puede lograr sin transformador utilizando resistencias de terminación de 50 ohmios en el dispositivo de destino. (Terminación AN2190 de 50 ohmios).
- Placa IMU con control de temperatura, lo que permite una temperatura de trabajo óptima de las IMU
- Modo de señal de 3,3 V o 5 V conmutable por hardware (requiere modificación de la placa base)
Nota:
- Se requiere un módulo FC + una placa base para que este producto funcione. Un módulo FC o una placa base por sí solos no funcionarán.
Especificación
Procesadores y sensores
- Procesador FMU: STM32H753
- Procesador Arm® Cortex®-M7 de 32 bits, 480 MHz, 2 MB de memoria flash, 1 MB de RAM
- Procesador de E/S: STM32F103
- Procesador ARM® Cortex®-M3 de 32 bits, 72 MHz, 64 KB de SRAM
- Sensores a bordo
- Acelerador/Giroscopio: ADIS16470
- ±40 g, IMU industrial con aislamiento de vibraciones
- Acelerador/Giroscopio: IIM-42652
- ±16 g, IMU industrial con aislamiento de vibraciones
- Acelerador/Giroscopio: ICM-45686 con tecnología BalancedGyro™
- ±32 g, montaje rígido
- Barómetro: ICP20100
- Barómetro: BMP388
- Magnético: BMM150
- Acelerador/Giroscopio: ADIS16470
- NXP Elemento de seguridad de hardware EdgeLock SE050 Plug & Trust
Datos eléctricos
- Clasificaciones de voltaje:
- Voltaje máximo de entrada: 6 V
- Entrada de alimentación USB: 4,75 ~ 5,25 V
- Entrada de riel servo: 0 ~ 36 V
- Calificaciones actuales:
- Limitador de corriente de salida Telem1: 1,5 A
- Limitador de corriente de salida combinada de todos los demás puertos: 1,5 A
- Temperatura de funcionamiento: -25-85 °C
Datos mecánicos
- Dimensiones
- Módulo controlador de vuelo: 38,8 x 31,8 x 30,1 mm
- Zócalo estándar: 52,4 x 102 x 16,7 mm (Aluminio)
- Mini zócalo: 43,4 x 72,8 x 14,2 mm
- Peso
- Módulo controlador de vuelo: 50 g
- Zócalo estándar: 72,5 g (Aluminio)
- Mini zócalo: 26.5g
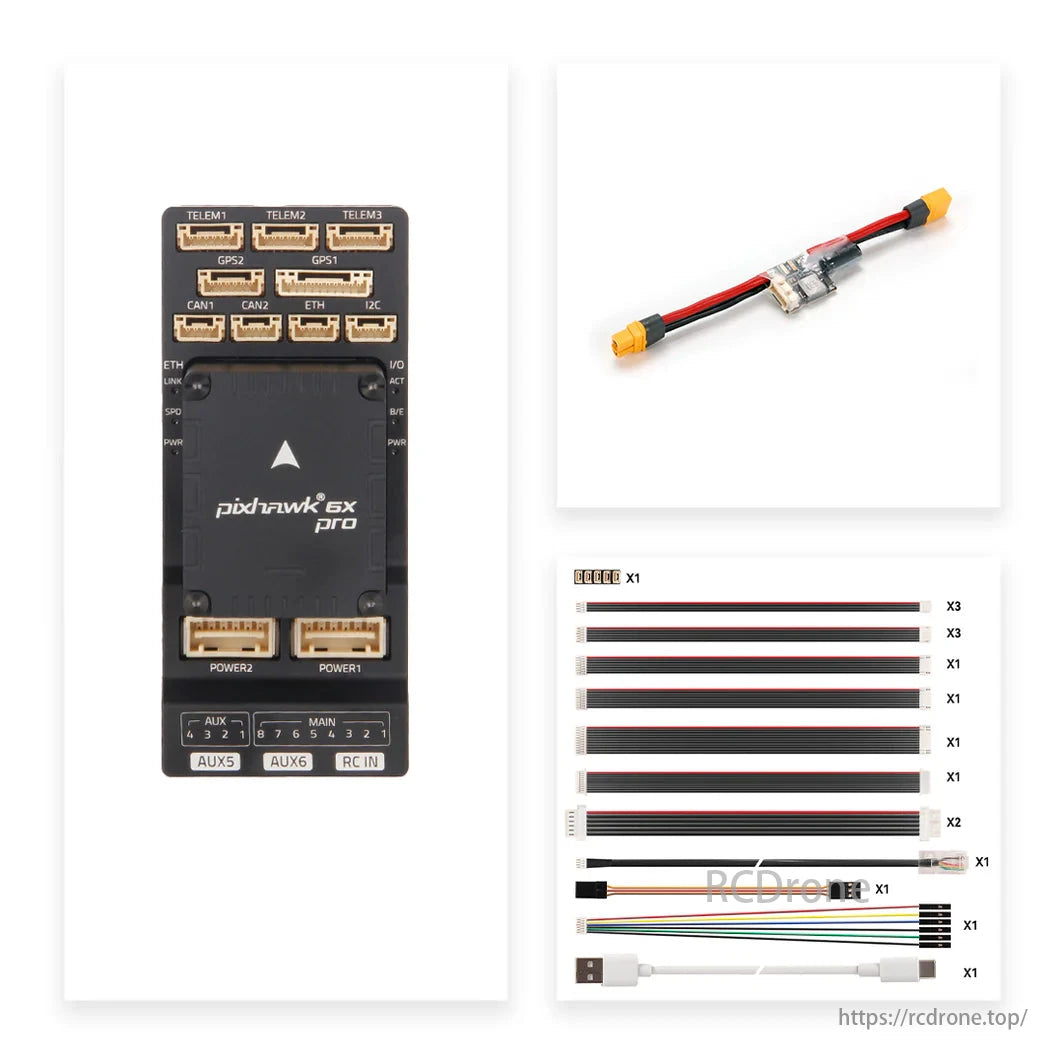
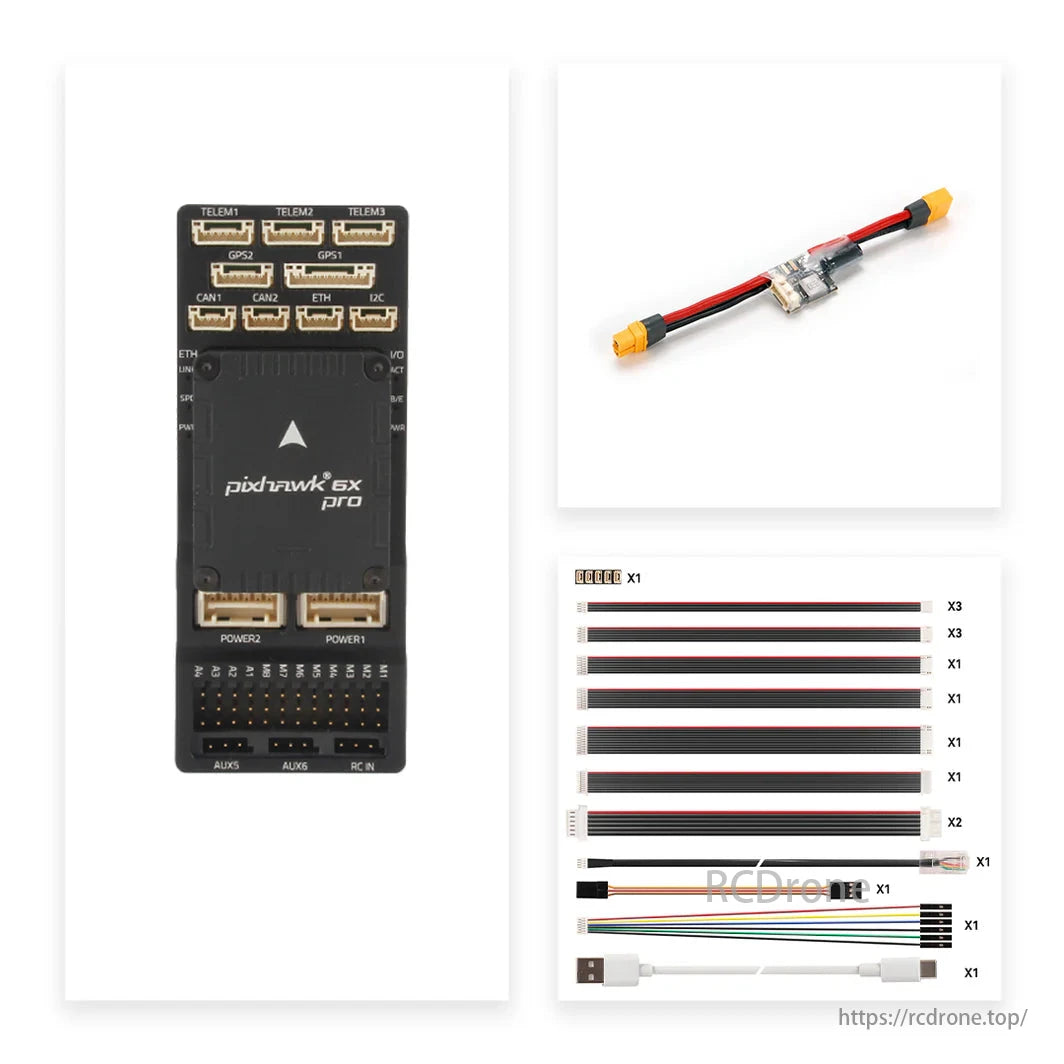
El paquete incluye
El módulo FC solo incluye:
- Halcón de Pixie Módulo controlador de vuelo 6X Pro
- Reemplazo de amortiguación IMU opcional (más suave que la preinstalada)
El conjunto estándar V2A/V2B/Mini incluye:
- Módulo controlador de vuelo Pixhawk 6X Pro
- Placa base estándar Pixhawk v2A/ Zócalo estándar Pixhawk v2B/ Mini zócalo
- Módulo de potencia de alto voltaje PM02D
- Juego de cables
Detalles
Diseño completamente nuevo de aislamiento de vibraciones
Este nuevo diseño de aislamiento de vibraciones utiliza CAMaterial de aislamiento duradero a base de silicona formulado a medida en lugar del diseño de espuma tradicional. BAprobado por una extensa investigación y desarrollo y pruebas, ofrece características de amortiguación IMU óptimas con frecuencia de resonancia en el espectro más alto, perfecto para drones industriales y comerciales.
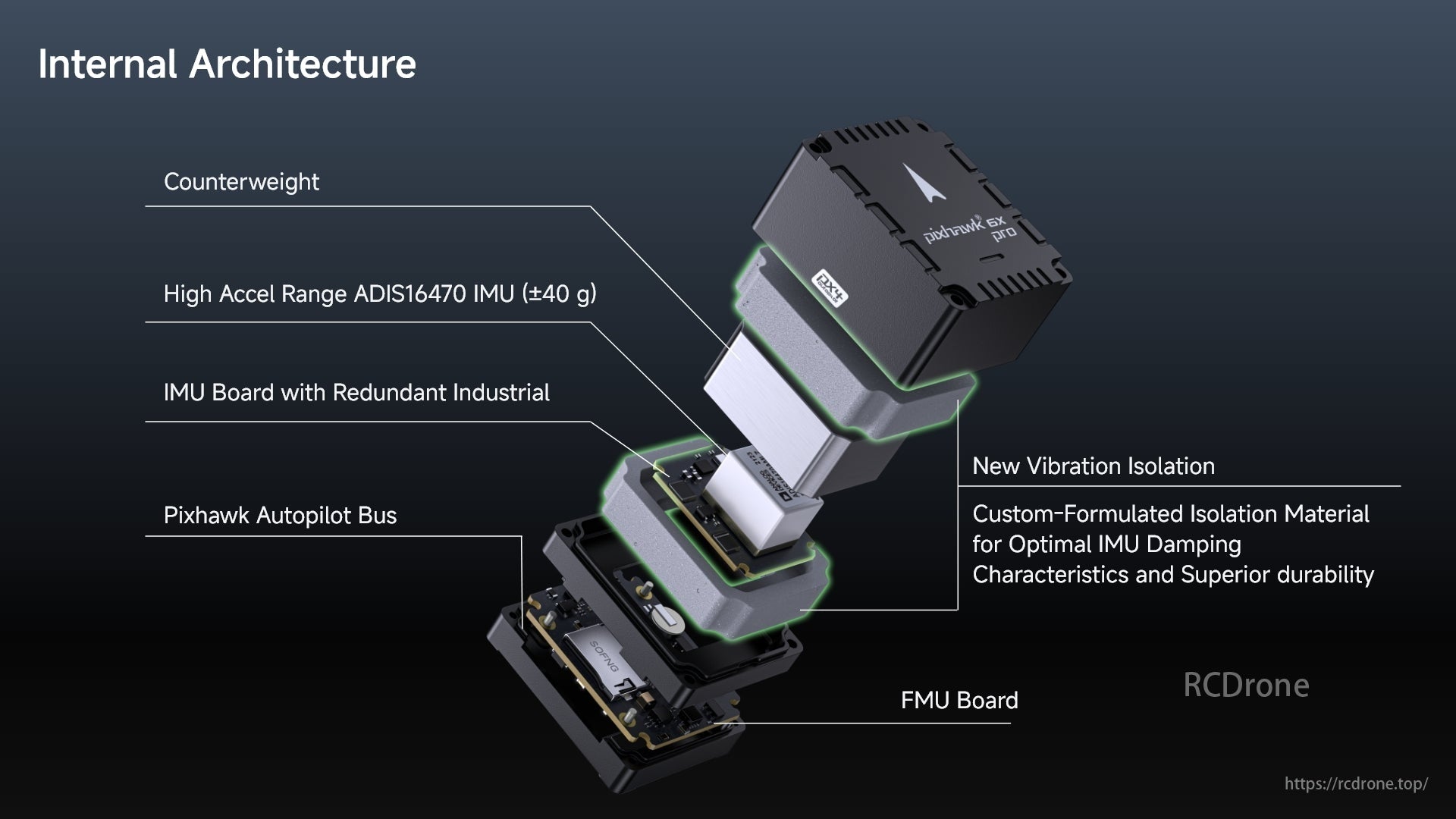
Arquitectura interna: contrapeso, IMU ADIS16470 de alto rango de aceleración (±40 g), placa IMU industrial redundante, bus de piloto automático Pixhawk, nuevo aislamiento de vibraciones, placa FMU.
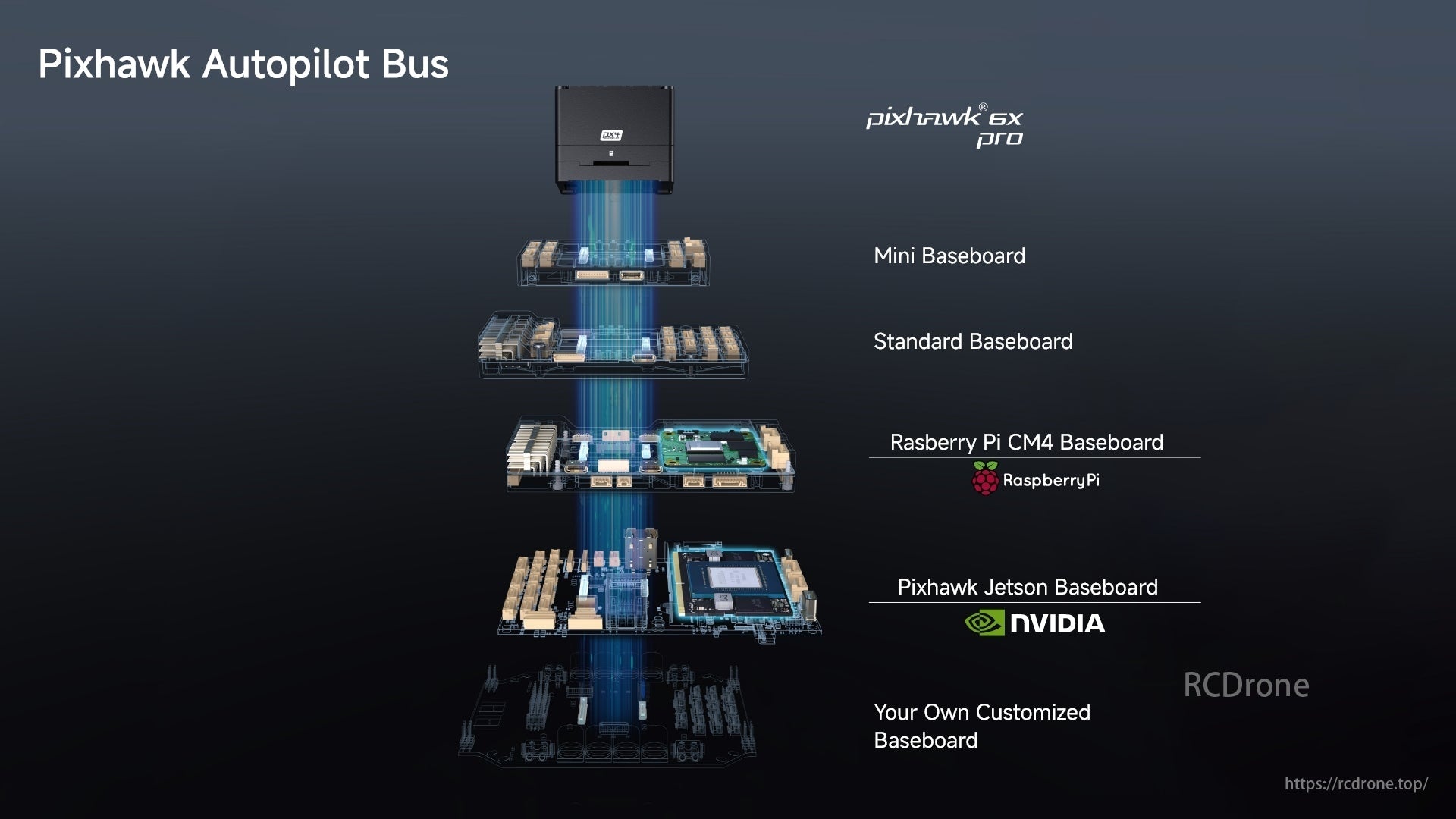
El bus de piloto automático Pixhawk conecta placas base Mini, Standard, Raspberry Pi CM4, Jetson y placas base personalizadas.
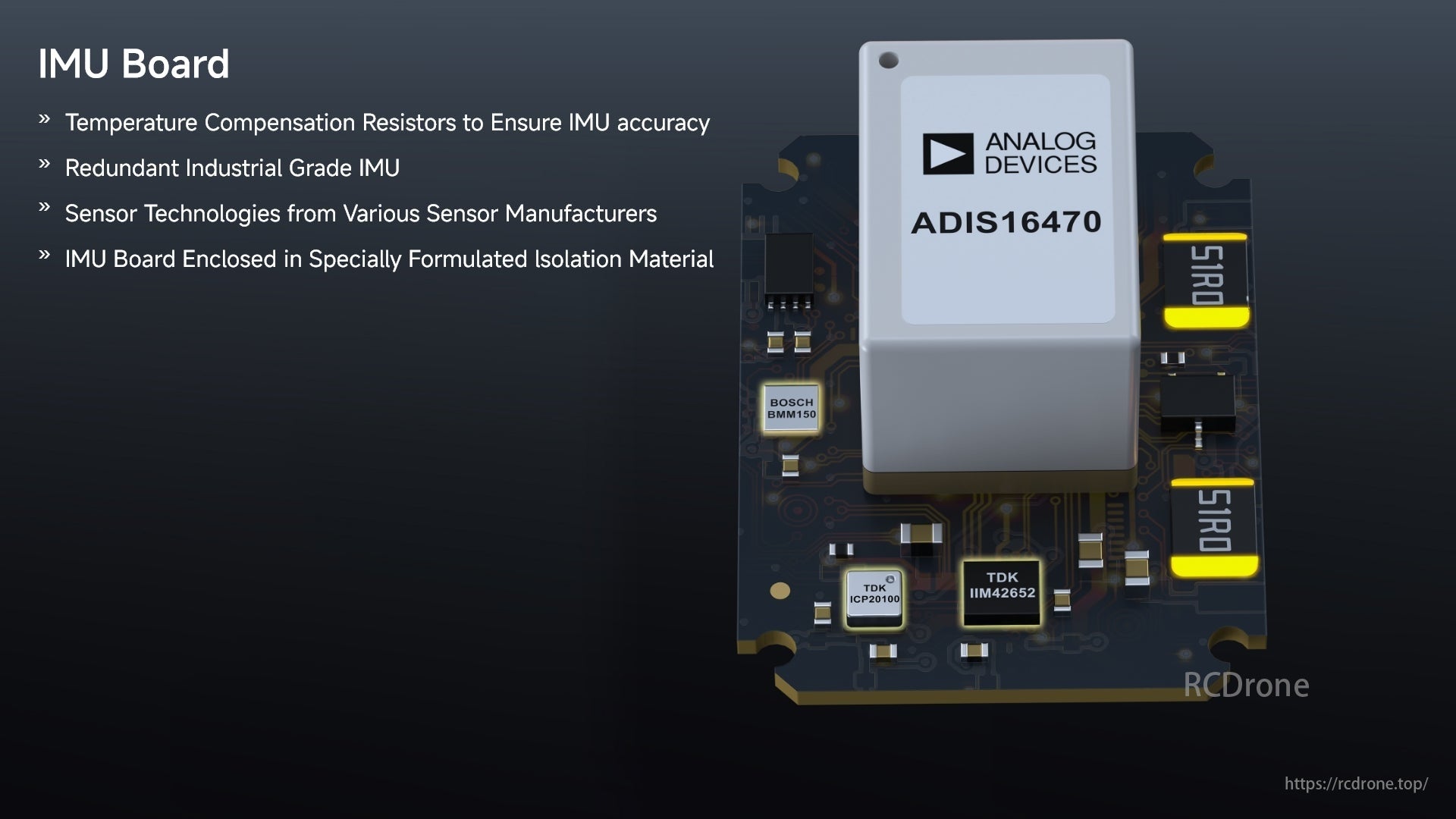
La placa IMU cuenta con resistencias de compensación de temperatura, IMU redundante de grado industrial, sensores de varios fabricantes y está encerrada en material de aislamiento.
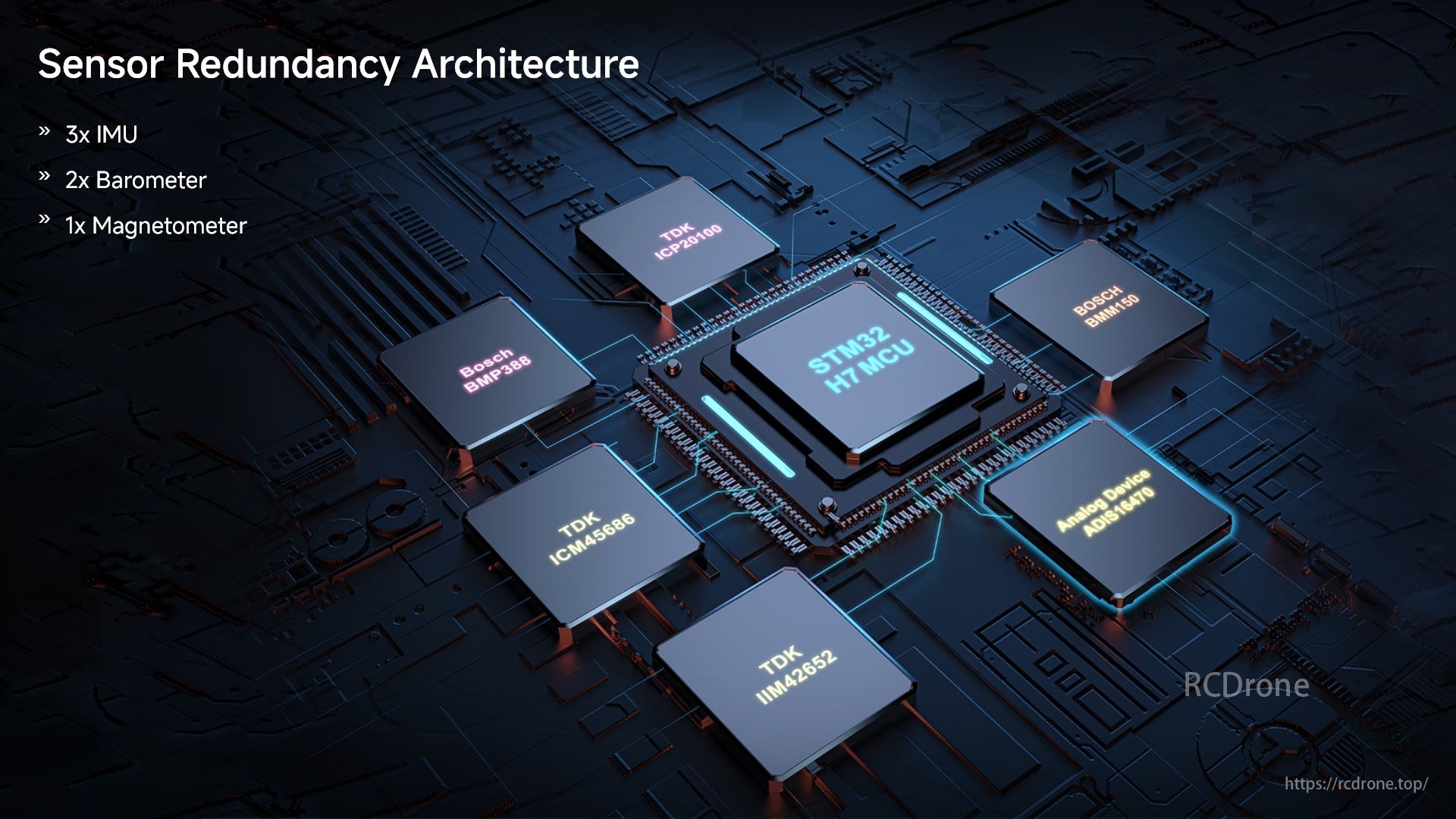
La arquitectura de redundancia de sensores incluye 3 IMU, 2 barómetros y 1 magnetómetro, con componentes como MCU STM32 H7, IC TDK, Bosch BMP388 y Analog Devices ADIS16470.
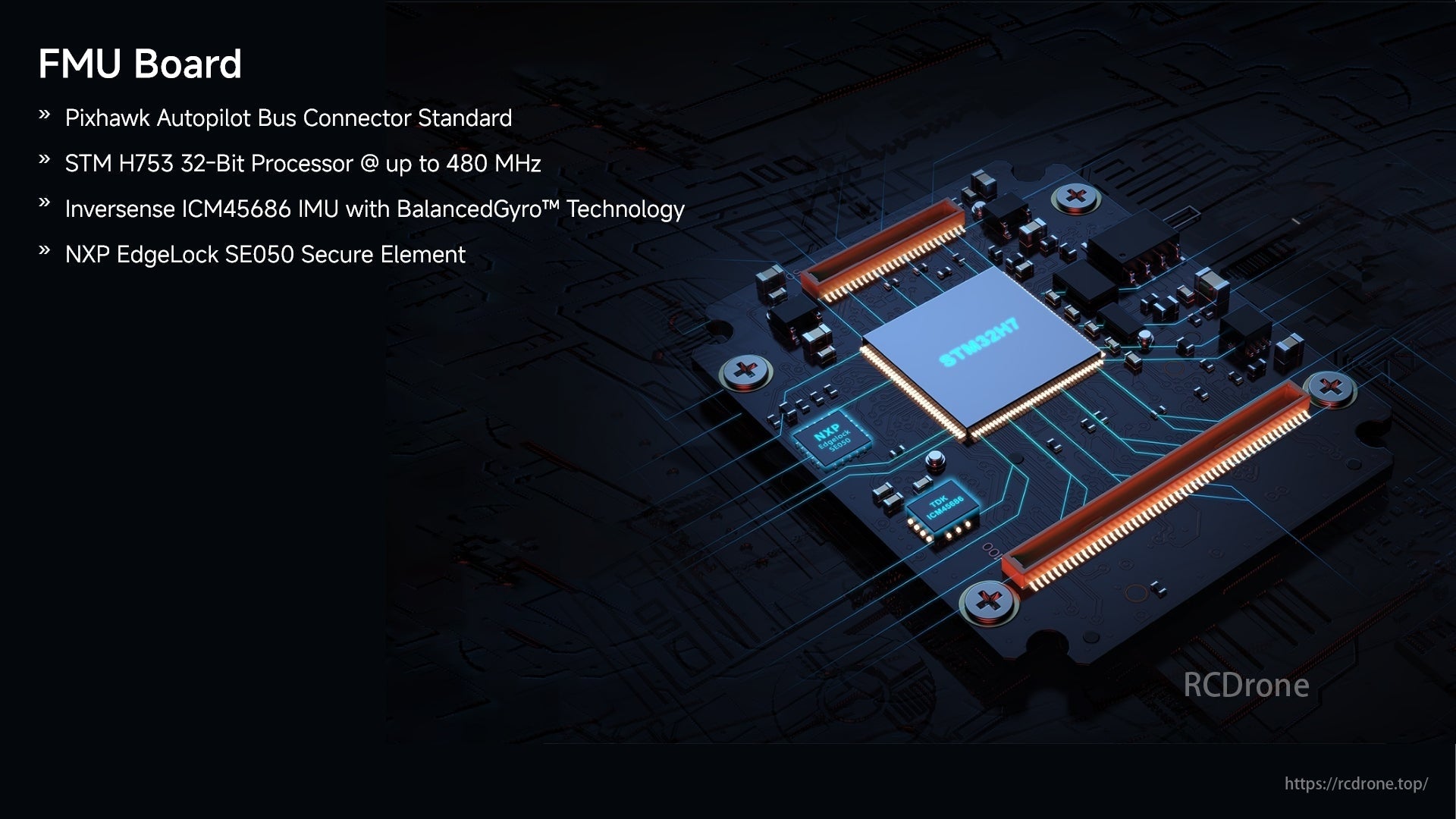
La placa FMU cuenta con conector de bus de piloto automático Pixhawk estándar, procesador STM H753 de 32 bits hasta 480 MHz, IMU Inversense ICM45686 con tecnología BalancedGyro y elemento seguro NXP EdgeLock SE050.
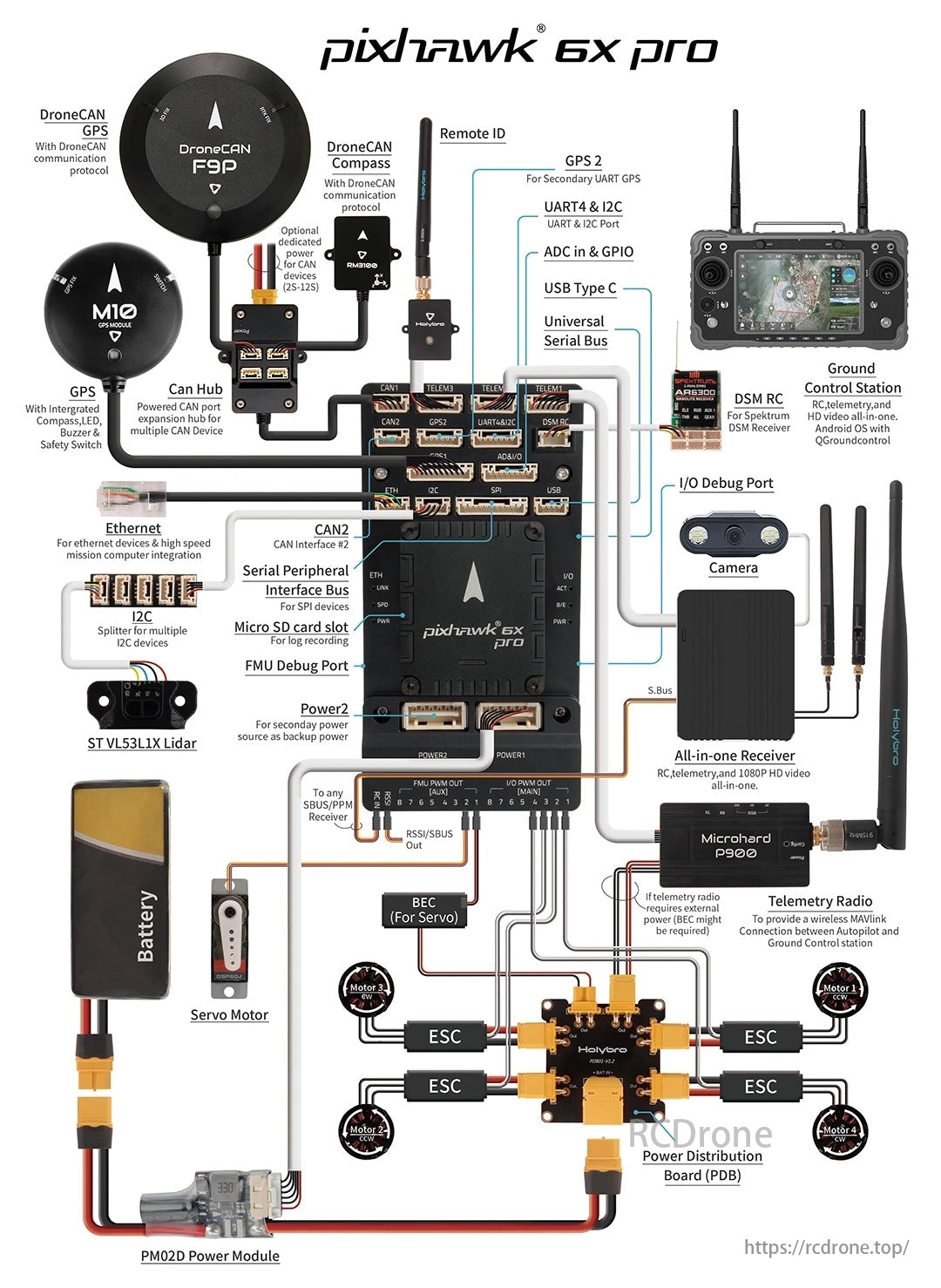
El diagrama de Pixhawk 6X Pro ilustra las conexiones del sistema de piloto automático de un dron, incluidos los módulos GPS, la brújula, la estación de control terrestre, la cámara, la radio de telemetría, los ESC, los motores y la placa de distribución de energía. Se utilizan varias interfaces como CAN, I2C, UART y USB para la comunicación entre los componentes.
Related Collections