Holybro Pixhawk 6X-RT - (Edición para desarrolladores) Controlador de vuelo con piloto automático estándar/mini juego
Holybro Pixhawk 6X-RT - (Edición para desarrolladores) Controlador de vuelo con piloto automático estándar/mini juego
HolyBro
No se pudo cargar la disponibilidad de retiro
Descripción general
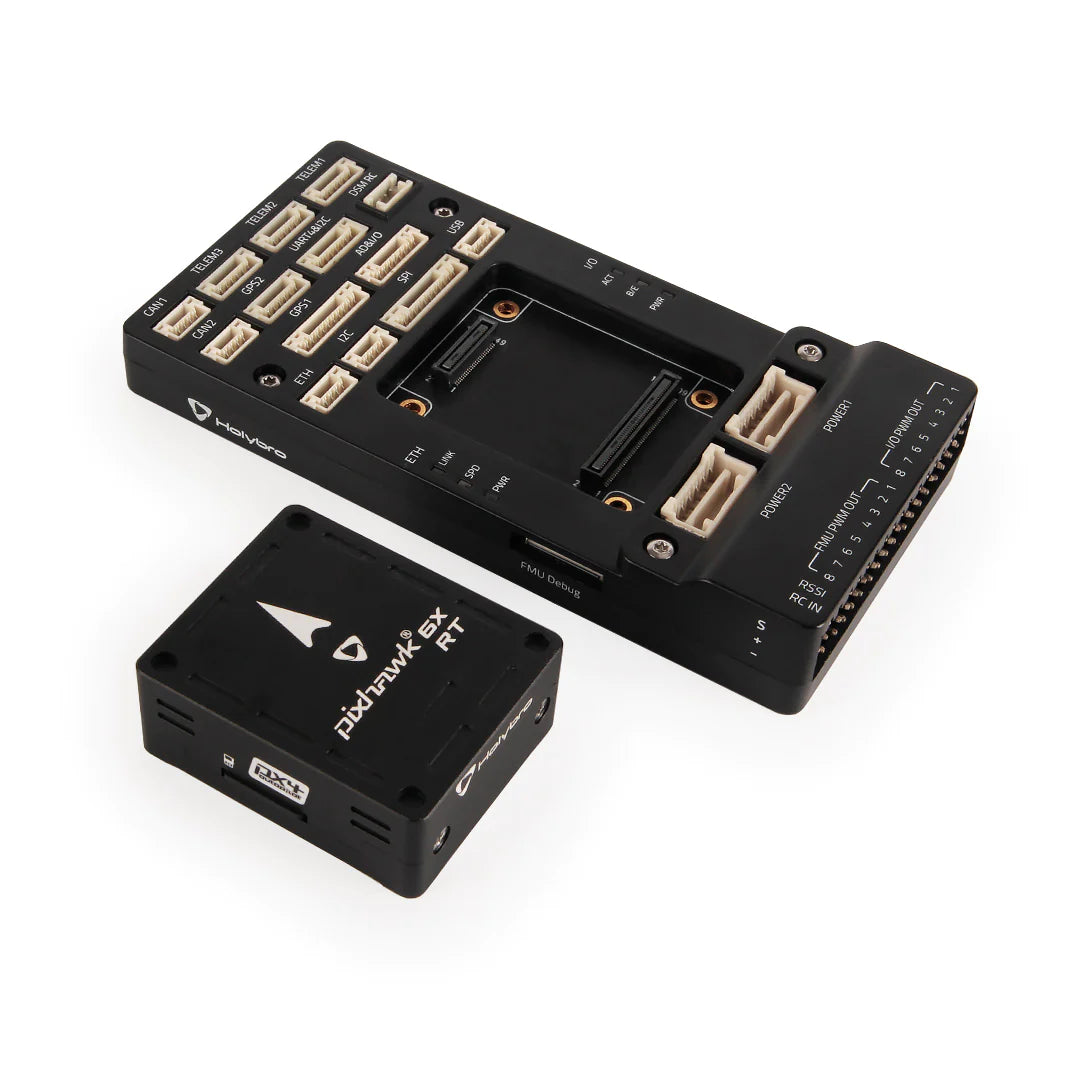
El Pixhawk 6X-RT se basa en el estándar abierto Pixhawk® FMUv6X-RT y el estándar de autobús de piloto automático Pixhawk®. Viene con PX4 Autopilot® preinstalado. Dentro del controlador de vuelo Pixhawk 6X-RT, puede encontrar un i.MCU MXRT1176, combinado con tecnología de sensores de Bosch® e InvenSense®, que le brinda flexibilidad y confiabilidad para controlar cualquier vehículo autónomo.
La i.El microcontrolador MXRT1176 contiene un Arm® Cortex-M7 a 1 GHz y un Cortex-M4 a 400 MHz. Tiene 2 MB de SRAM y 64 MB de Flash Octal SPI. Gracias a la potencia de procesamiento actualizada, los desarrolladores pueden ser más productivos y eficientes con su trabajo de desarrollo, lo que permite algoritmos y modelos complejos.
Incluye IMU de alto rendimiento y bajo ruido diseñadas para una mejor estabilización, y tiene IMU con triple redundancia y barómetros con doble redundancia en autobuses separados. Cuando el piloto automático detecta una falla en un sensor, el sistema cambia sin problemas a otro para mantener la confiabilidad del control de vuelo. Un LDO independiente alimenta cada conjunto de sensores con control de potencia independiente. Un sistema de aislamiento de vibraciones para filtrar las vibraciones de alta frecuencia y reducir el ruido para garantizar lecturas precisas, lo que permite que los vehículos alcancen mejores rendimientos generales de vuelo. Ahora es posible una comunicación de alta velocidad con Microchip Ethernet PHY integrada con las computadoras de la misión a través de Ethernet.
El Pixhawk 6X-RT es perfecto para desarrolladores en laboratorios de investigación corporativos, empresas emergentes, académicos (investigadores, profesores, estudiantes) y aplicaciones comerciales. Este controlador de vuelo es compatible con cualquier placa base que utilice el bus Pixhawk Autopilot, como la Pixhawk Baseboard, Pixhawk Mini Baseboard y Pixhawk RPi CM4.
Puntos clave de diseño
- Alto rendimiento doble núcleo i.Procesador MXRT1176 con Cortex-M7 @ 1GHz – Cortex-M4 @ 400MHz
- Controlador de vuelo modular: IMU, FMU y sistema base separados conectados por un conector de bus de piloto automático Pixhawk® de 100 y 50 pines.
- Redundancia: 3 sensores IMU y 2 sensores barómetro en buses separados
- Dominios de redundancia triple: dominios de sensores completamente aislados con buses separados y control de energía separado
- Sistema de aislamiento de vibraciones para filtrar vibraciones de alta frecuencia y reducir el ruido para garantizar lecturas precisas
- Interfaz Ethernet para integración de computadoras de misión de alta velocidad
- Las IMU tienen control de temperatura mediante resistencias de calentamiento integradas, lo que permite una temperatura de funcionamiento óptima de las IMU
- Elemento de seguridad de hardware NXP EdgeLock SE051 una extensión de la familia de elementos de seguridad ampliamente confiable EdgeLock SE050 Plug & Trust, admite actualizaciones de subprogramas en el campo y ofrece Seguridad probada certificada según CC EAL 6+, con AVA_VAN.5 hasta el nivel del sistema operativo, para una fuerte protección contra los escenarios de ataque más recientes. mig para almacenar de forma segura el ID del operador
Nota:
- Esta edición para desarrolladores para los primeros usuarios mientras continuamos acumulando horas de pruebas de vuelo
- Actualmente, este controlador de vuelo solo es compatible con PX4 Flight Stack. (Objetivo del firmware: FMUv6xrt). No es compatible con Ardupilot.
- Este controlador de vuelo utiliza un módulo de alimentación digital (igual que Pixhawk 6X, la lista completa se puede encontrar aquí) Tabla comparativa de módulos de alimentación
Especificación
-
MCU: i.MXRT1176
-
Cortex-M7 a 1 GHz
-
Cortex-M4 a 400MHz
-
2 MB de memoria RAM
-
Flash SPI octal de 64 MB
-
Procesador de E/S: STM32F103
-
Arm® Cortex®-M3 de 32 bits, 72 MHz, 64 KB SRAM
-
Sensores integrados
-
Aceleración/giro: BMI088
-
Aceleración/giro: ICM-42670-P
-
Aceleración/giro: ICM-42686-P
-
Mag: BMM150
-
Barómetro: 2x BMP388
- Elemento seguro de hardware
- NXP EdgeLock SE051C2
- Interfaz SDHC
- PWM de 12 canales
- 8xUART
- 4xI2C
- 6x SPI
- 3x CAN-FD
- Ethernet RMII 100M
- USB
- Habilitación de software de código abierto
- Piloto automático PX4
- NuttX RTOS
- Zephyr RTOS
El juego estándar SKU20257/el juego mini SKU258 incluye:
-
Módulo controlador de vuelo Pixhawk 6X-RT
-
Base estándar Pixhawk/Base mini Pixhawk
- Módulo de alimentación HV PM02D
-
Juego de cables
Enlace de referencia:
- Instrucción de actualización de firmware (Github)
- PX4 en la MCU NXP IMXRT1176 de 1 GHz - Diapositivas de presentación de NXP
- i.MX RT1176 – página del producto MCU cruzado de 1 GHz con núcleos Arm® Cortex®
- EdgeLock® SE051: solución de seguridad de IoT probada y fácil de usar con soporte para capacidad de actualización y subprogramas personalizados
Related Collections