Paquete de placa base Holybro Pixhawk Jetson con 6X / 6X Pro y NVIDIA Jetson
Paquete de placa base Holybro Pixhawk Jetson con 6X / 6X Pro y NVIDIA Jetson
HolyBro
No se pudo cargar la disponibilidad de retiro
Descripción general
El Zócalo Holybro Pixhawk Jetson está diseñado en base a la Especificación de código abierto del bus de piloto automático Pixhawk (PAB) y se integra perfectamente con el Placa portadora NVIDIA Jetson Orin NX/Nano. El Factor de forma PAB permite la compatibilidad con cualquier controlador de vuelo PAB, incluido el Pixhawk 6XEsta placa combina la potencia computacional de Jetson de NVIDIA con las capacidades de control de vuelo de Halcón de Pixie, lo que lo hace ideal para aplicaciones autónomas avanzadas.
Características principales
-
Sistema Unificado: Combina Halcón de Pixie y Jetson de NVIDIA en un solo tablero.
-
Conectividad perfecta: Jetson y Pixhawk se comunican a través de Conmutador UART, CAN y Ethernet.
-
Amplia compatibilidad: Soportes Jetson Orin NX y Orin Nano.
-
Expansión de alta velocidad: Características 2 ranuras para llave M.2 para WiFi/Bluetooth y SSD NVMe.
-
Integración Pixhawk 6X: Equipado con Sensores ICM-45686 para un mejor control del vuelo.
Procesadores y sensores
Procesador FMU:
-
STM32H753
-
ARM Cortex-M7 de 32 bits, 480 MHz
-
Memoria Flash de 2 MB, RAM de 1 MB
Procesador IO:
-
STM32F103
-
ARM Cortex-M3 de 32 bits, 72 MHz
-
Memoria RAM de 64 KB
Sensores integrados (Rev8)
-
Acelerómetro/Giroscopio: 3x ICM-45686 (con tecnología BalancedGyro™)
-
Barómetro: ICP20100 y BMP388
-
Magnetómetro: BMM150
Puertos y conectividad de la placa base
Conectores Jetson
-
2 puertos Gigabit Ethernet (Conectado a Jetson y Autopilot a través de Conmutador Ethernet RTL8367S)
-
2 entradas de cámara MIPI CSI (4 carriles cada uno, Cable FFC para cámara Raspberry Pi de 22 pines)
-
2 puertos host USB 3.0 (USB-A, límite de corriente de 5 A)
-
2x USB 2.0 puertos de host (Conector JST-GH de 5 pines)
-
USB 2.0 para depuración (USB-C)
-
Salida mini HDMI
-
2 ranuras M.2:
-
Clave M (2242) para SSD NVMe (PCIEx4)
-
Clave E (2230) para WiFi/BT (PCIEx2, UART, USB, I2S)
-
-
Puerto CAN (Conectado a Piloto automático CAN2, JST-GH de 4 pines)
-
Puertos SPI, I2C, I2S y UART (Varios conectores JST-GH)
-
Puerto de alimentación del ventilador
-
Entrada de energía: Conector XT30, 7-21 V (3S-4S)
-
UBEC 12A (3-14S) Recomendado para aplicaciones >4S
Conectores del piloto automático
-
Interfaz de bus del piloto automático Pixhawk: Hirose DF40 de 100 pines y 50 pines
-
Entradas de módulo de potencia digital redundantes
-
Compatibilidad con monitor de potencia I2C
-
Puertos de interruptor de seguridad y GPS: JST-GH de 10 pines y 6 pines
-
2 puertos CAN (JST-GH de 4 pines)
-
3 puertos de telemetría (JST-GH, uno conectado al UART1 de Jetson)
-
16 salidas PWM (2x JST-GH de 10 pines)
-
USB 2.0 (USB-C y JST-GH de 4 pines)
-
Entrada DSM (JST-ZH de 3 pines, paso de 1,5 mm)
-
Entrada RC (PPM/SBUS, JST-GH de 5 pines)
-
Puerto SPI para bus de sensor externo (SPI5, JST-GH de 11 pines)
-
2 puertos de depuración (FMU y IO, JST-SH de 10 pines)
Requisitos de energía
-
Voltaje de entrada: 7-21 V (3S-4S) a través del conector XT30
-
Requisito mínimo de potencia: 8 V/3 A (varía según los periféricos)
-
Admite UBEC externo 12A (3-14S) para redundancia y aplicaciones de mayor voltaje
-
Protección contra sobretensión incorporada
Dimensiones y peso
-
Tamaño del tablero: 126 x 80 x 38 mm (sin Jetson ni controlador de vuelo)
-
Peso: 203.2 gramos (Incluye Jetson, disipador de calor, controlador de vuelo, SSD y módulo Wi-Fi)
Especificaciones del modelo UBEC-12A
-
Voltaje de entrada: 3~14S (XT30)
-
Voltaje de salida: 6,0 V/7,2 V/8,0 V/9,2 V (Se recomiendan 7,2 V para Jetson)
-
Corriente de salida continua: 12A
-
Corriente de salida de ráfaga: 24A
-
Tamaño: 48 x 33,6 x 16,3 mm
-
Peso: 47,8 g
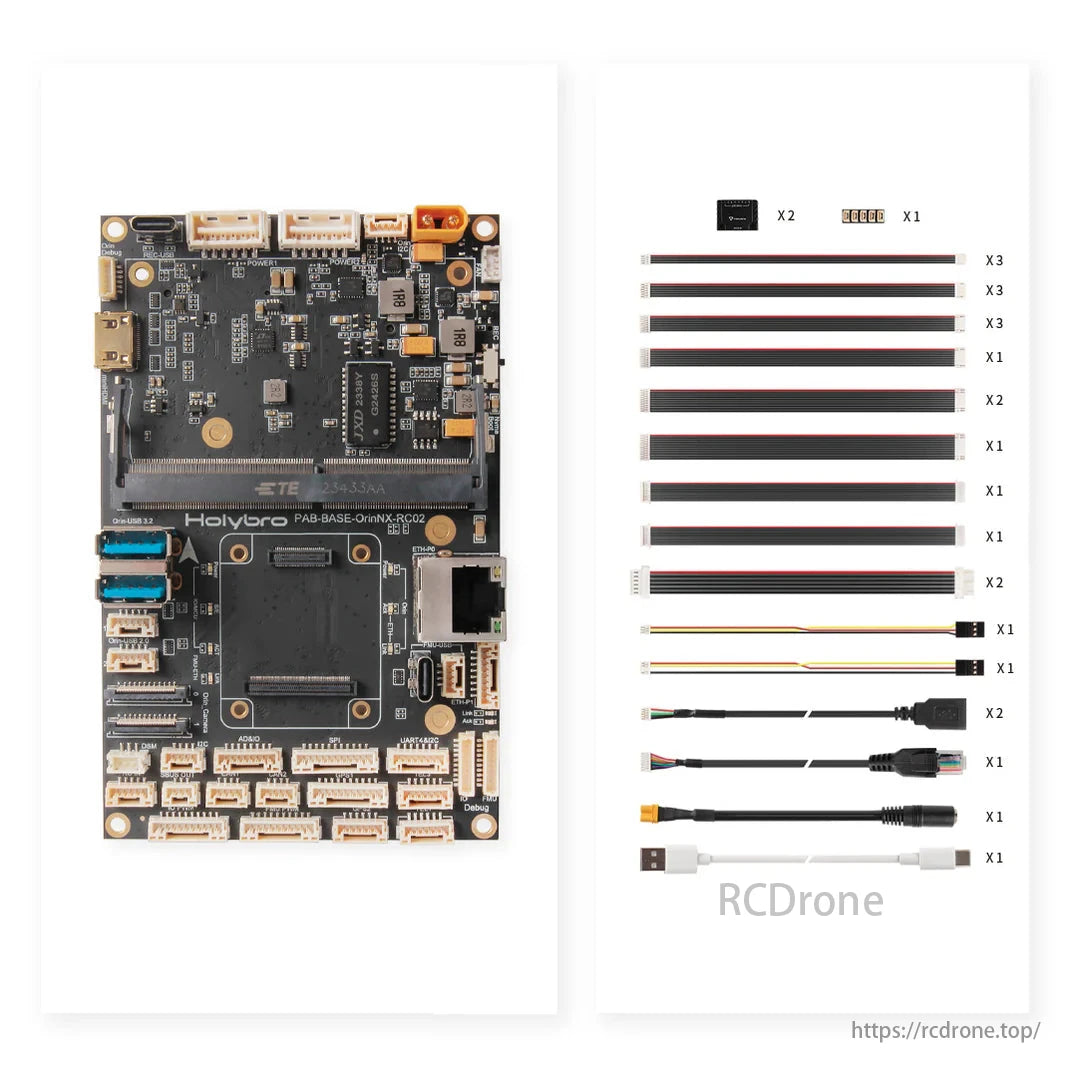
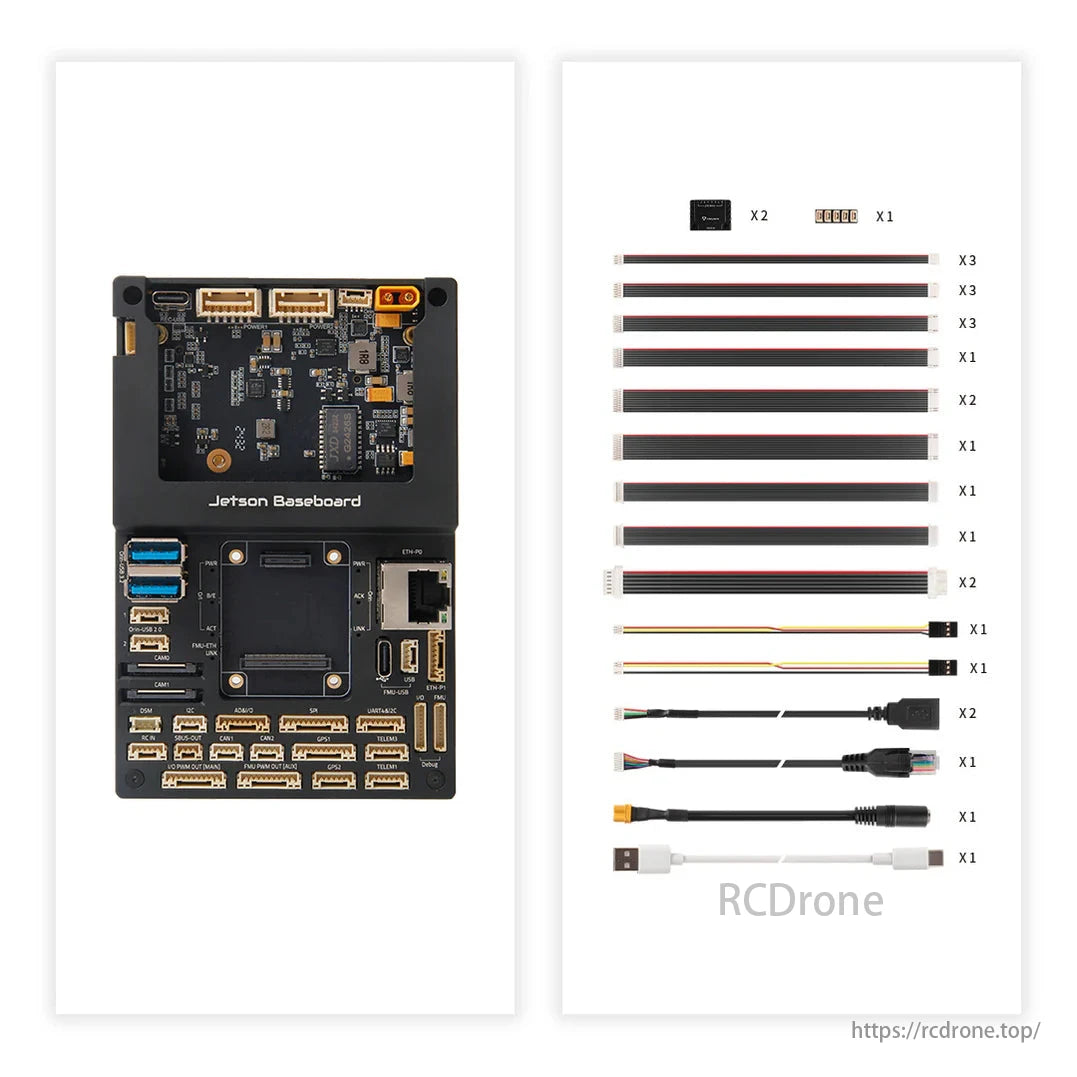
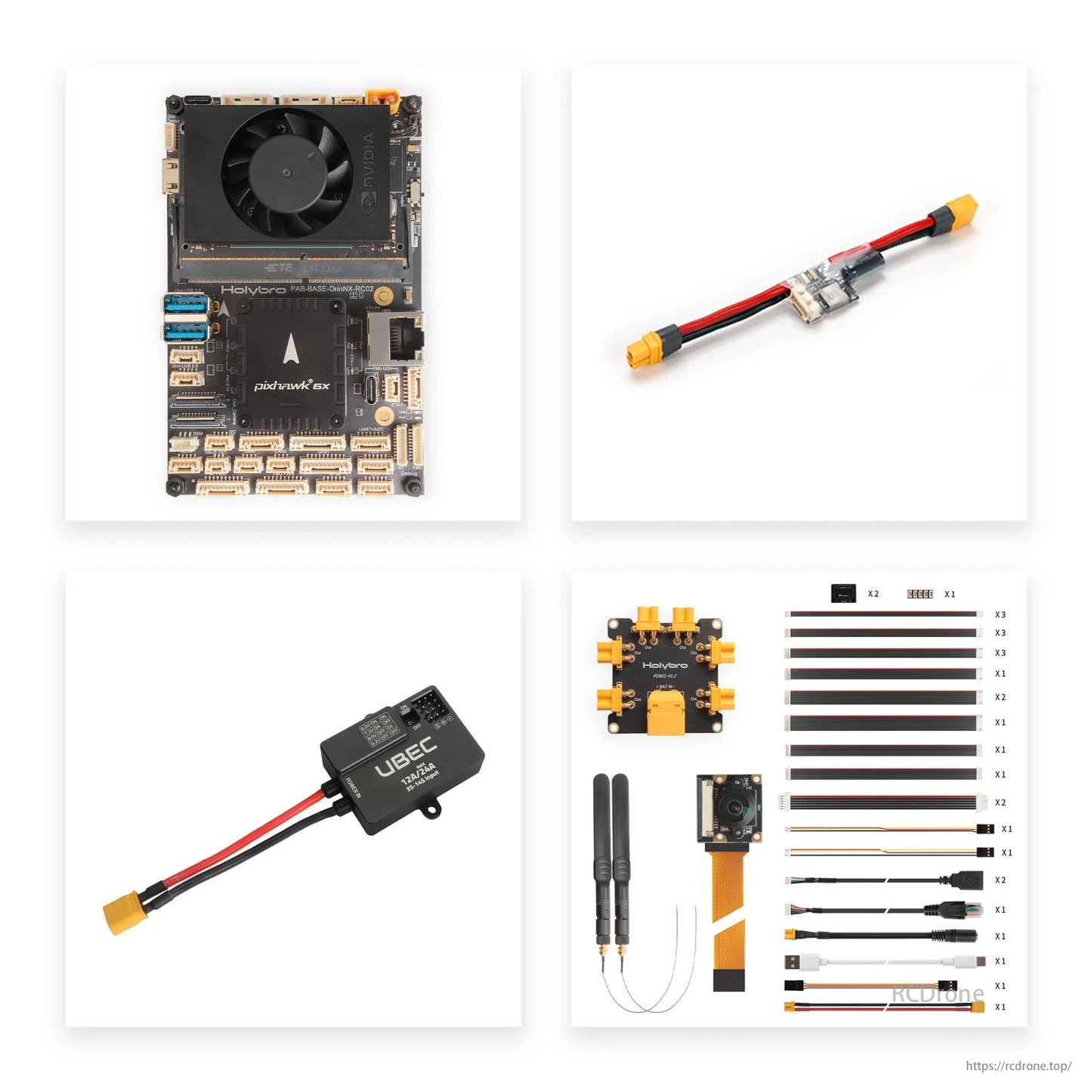
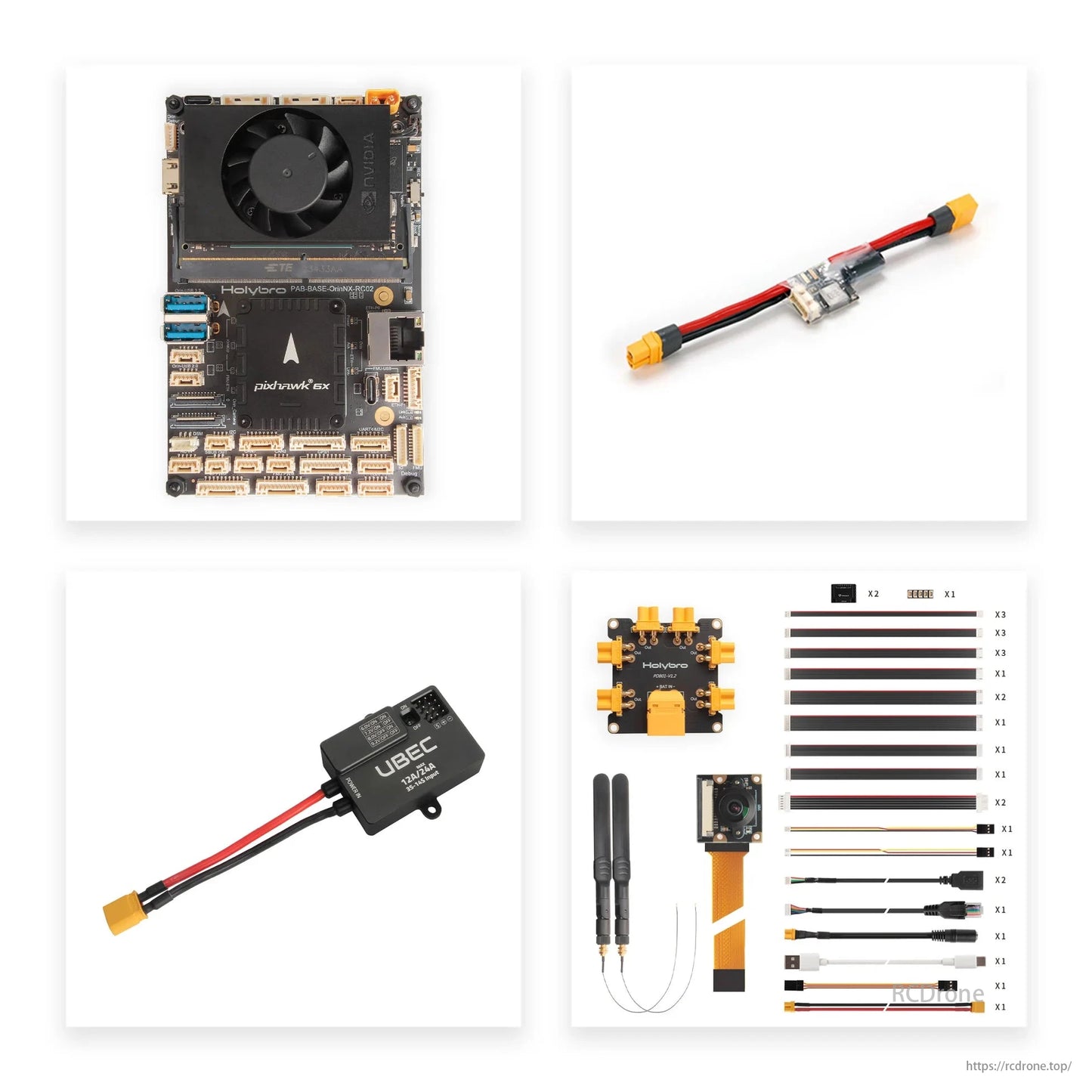
Contenido del paquete
Paquete Pixhawk 6X
-
Módulo controlador de vuelo Pixhawk 6X (ICM-45686)
-
Zócalo Pixhawk Jetson Orin
-
Nvidia Orin NX (16 GB de RAM) / Orin Nano (4 GB de RAM) con disipador de calor y ventilador
-
Unidad de estado sólido: Samsung PM9B1 PCIe 4.0 NVMe de 512 GB
-
Módulo Wi-Fi y Bluetooth: Intel 8265NGW Banda dual CA / Realtek RTL8B22CE
-
Cámara: IMX219-200
-
Módulo de potencia PM02D
-
UBEC 12A (3-14S)
-
Placa PDB y conjunto de cables
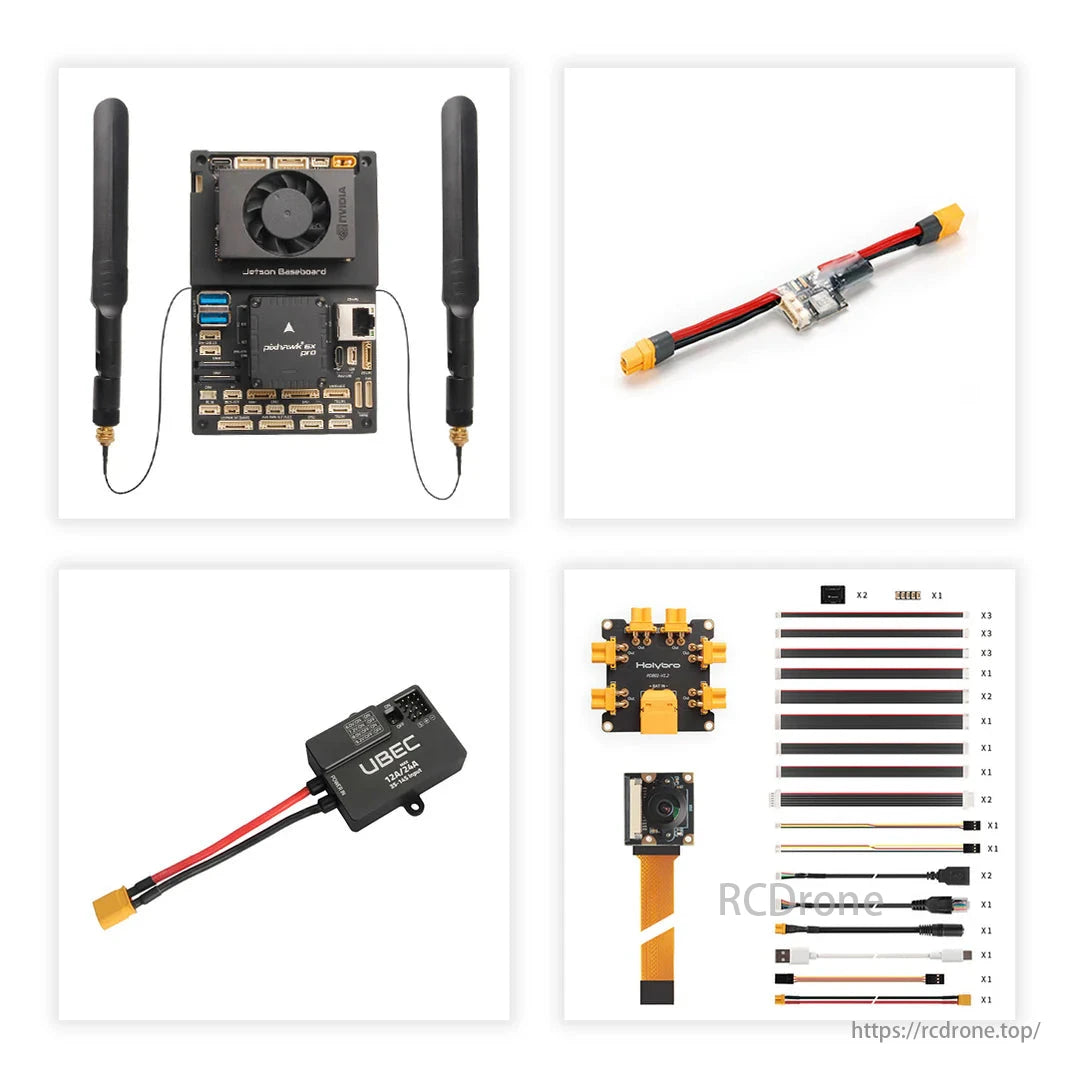
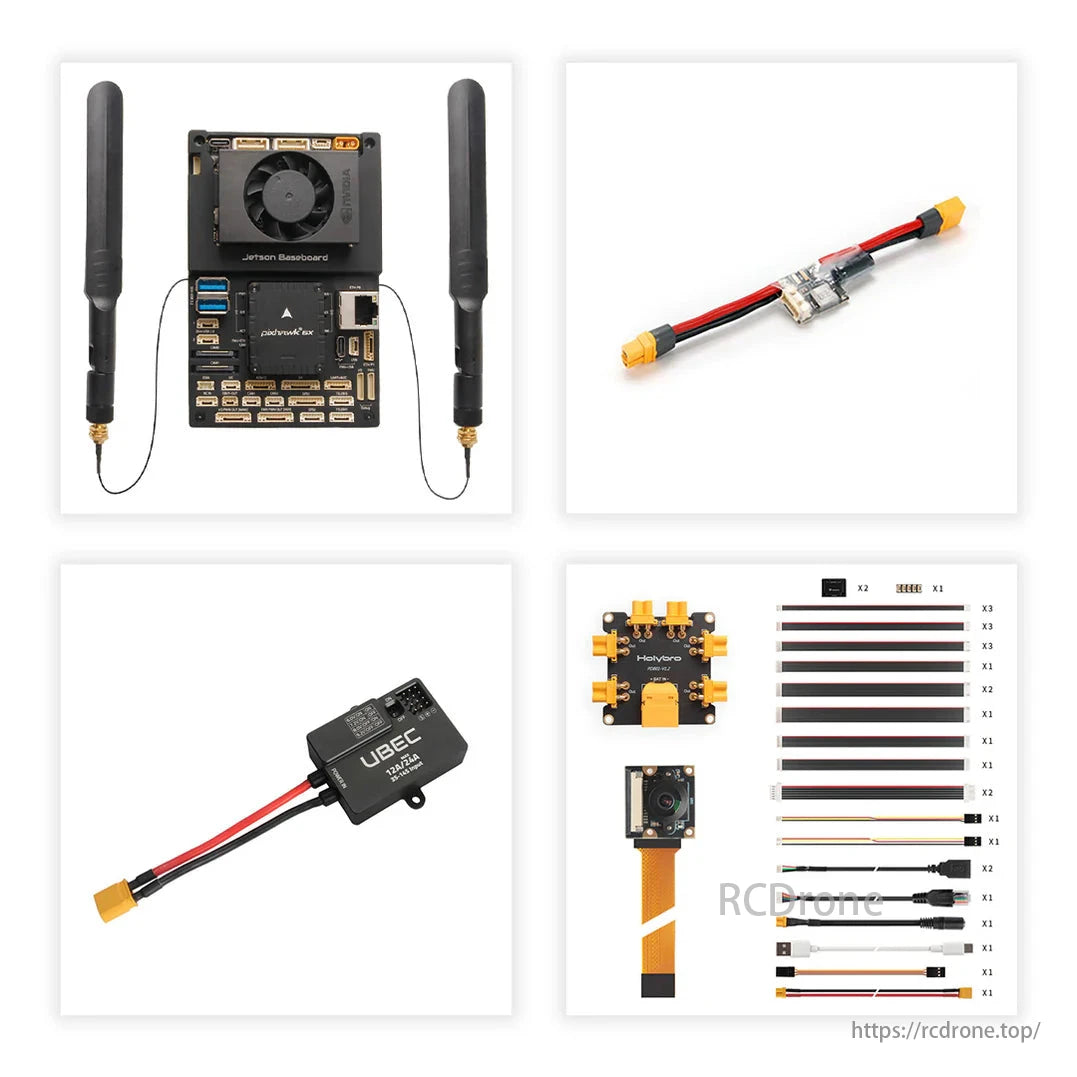
Paquete Pixhawk 6X Pro
-
Módulo controlador de vuelo Pixhawk 6X Pro
-
Zócalo Pixhawk Jetson Orin (con o sin estuche)
-
Nvidia Orin NX (16 GB de RAM) / Orin Nano (4 GB de RAM) con disipador de calor y ventilador
-
SSD, módulo Wi-Fi/Bluetooth, cámara, módulo de alimentación PM02D, UBEC 12A, placa PDB, juego de cables
Zócalo Jetson solamente
-
Zócalo Pixhawk Jetson Orin (con o sin estuche)
-
Juego de cables
Enlaces de referencia
Credenciales de inicio de sesión predeterminadas para Jetson Orin:
-
IDENTIFICACIÓN:
hermano santo -
Contraseña:
123
Detalles




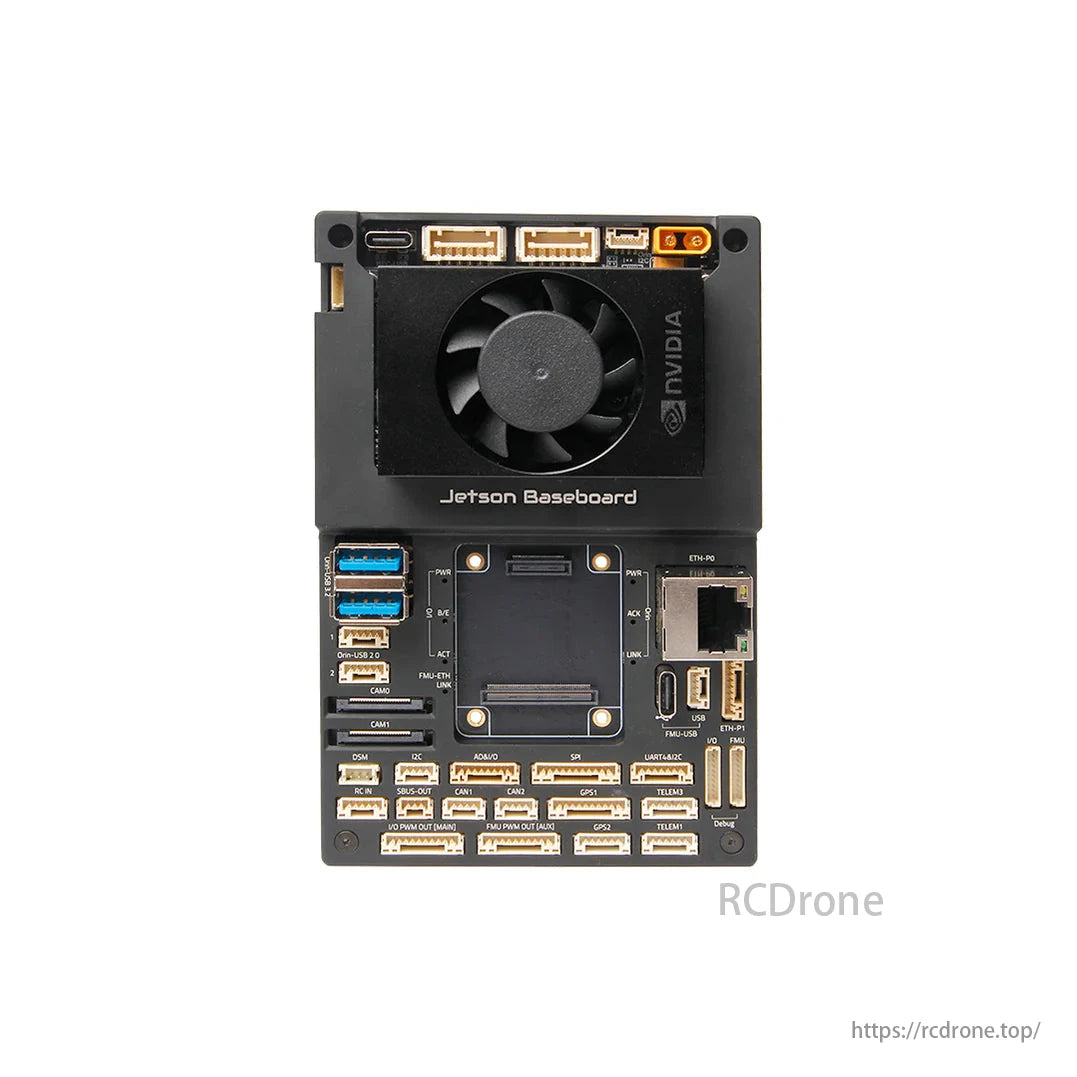
Pixhawk y Nvidia Jetson combinados en una sola placa.

Nvidia jetson conectada a través de uart can y conmutador ethernet mediante conector rj45 para sistemas de piloto automático
Especificación de código abierto del bus de piloto automático Pixhawk (PAB)

Sistema de conector SoDIMM de Jetson totalmente compatible: Jetson Orin NX/Nano

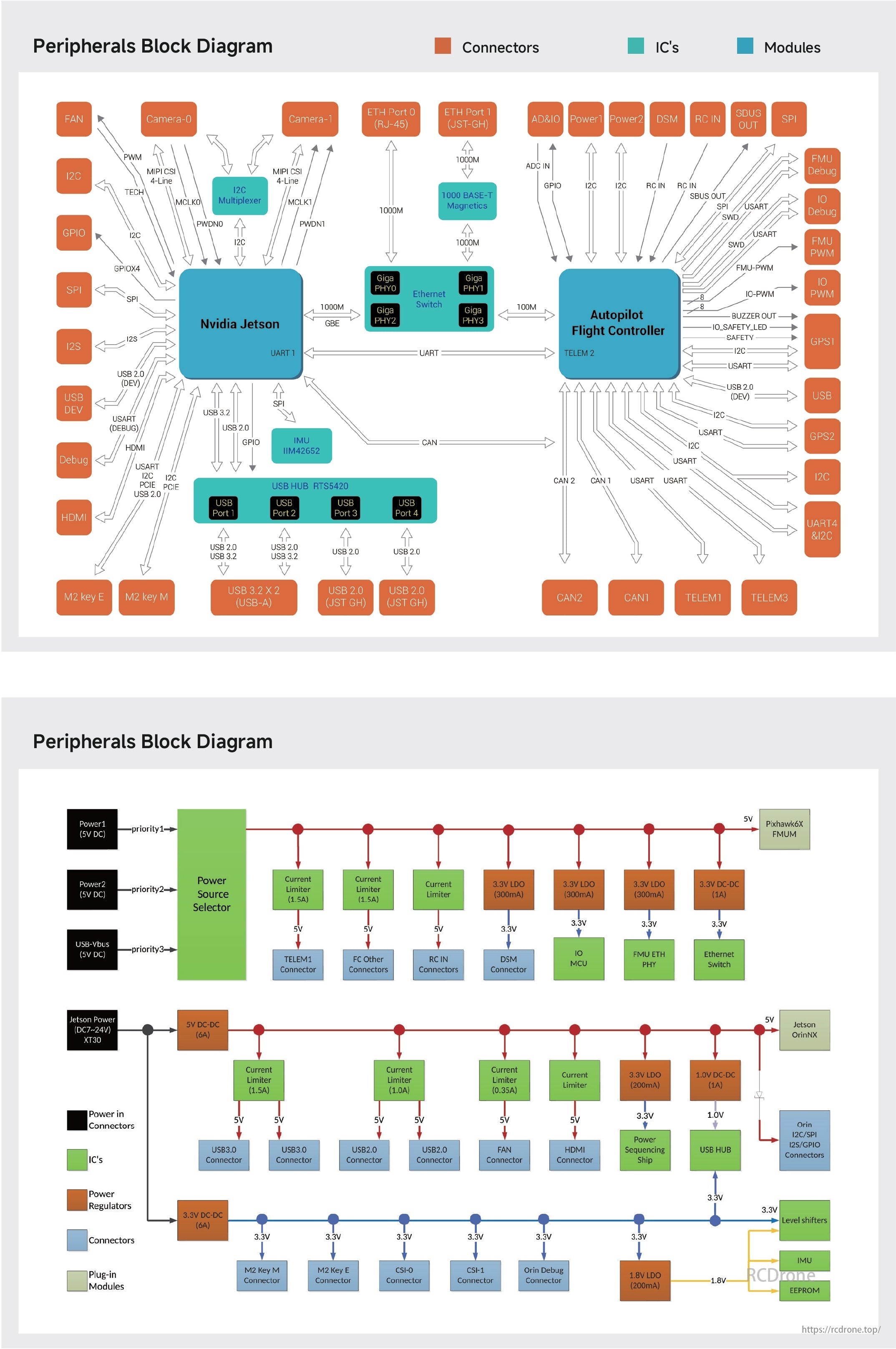
La imagen muestra un diagrama de bloques de periféricos para un sistema integrado, que incluye componentes como Nvidia Jetson y el controlador de vuelo Autopilot. Incluye varios conectores, circuitos integrados y módulos como puertos USB, conmutadores Ethernet y reguladores de potencia, que ilustran sus interconexiones y el flujo de datos.
Diagrama de cableado de referencia

Dos diagramas ilustran los sistemas de distribución de energía para un módulo Jetson que utiliza una batería. El diagrama de la izquierda utiliza un módulo de energía PM02D y una placa de distribución de energía, mientras que el diagrama de la derecha incluye un UBEC externo para baterías de más de 4S.Ambas configuraciones garantizan una regulación de voltaje adecuada para Jetson y Pixhawk Power.
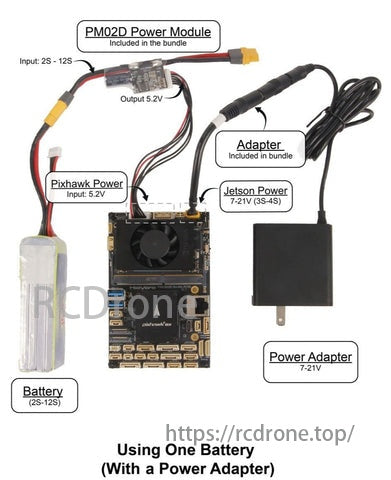
El módulo de alimentación PM02D conecta la batería a Pixhawk y Jetson, utilizando una batería con un adaptador de alimentación para entrada de 7-21 V.
Related Collections