Módulo de alimentación Holybro PM02D de alto voltaje (2S-12S)v para controlador de vuelo con piloto automático
Módulo de alimentación Holybro PM02D de alto voltaje (2S-12S)v para controlador de vuelo con piloto automático
HolyBro
No se pudo cargar la disponibilidad de retiro
- - La versión PM02D HV es compatible con PX4. Para Ardupilot, es compatible con la versión 4.4 y posteriores. Puede encontrar la guía de configuración completa aquí.
- - Este PM utiliza salida de datos de señal digital I2C y no es compatible con controladores de vuelo que utilizan PM analógicos como los controladores de vuelo Pixhawk 6C y Mini, Pixhawk4 y Mini, pix32 v5 o Durandal.
Descripción
PM02D proporciona suministro de energía regulado para tu Pixhawk® 5X y 6X desde la batería, así como mediciones de consumo de corriente y voltaje de la batería, todo a través de un cable de 6 pines. El regulador de conmutación integrado genera 5,2 V y un máximo de 3 A desde baterías LiPo de hasta 12 S (HV). El módulo de alimentación viene completamente ensamblado con conectores XT60, envueltos en tubos retráctiles para protección contra daños físicos.
No está diseñado para alimentar servos; utilice el ESC/BEC de su avión para eso. El conector de cable a placa CLIK-Mate de Molex con paso de 2,00 mm está clasificado para una corriente de 3,0 A por contacto.
Especificación
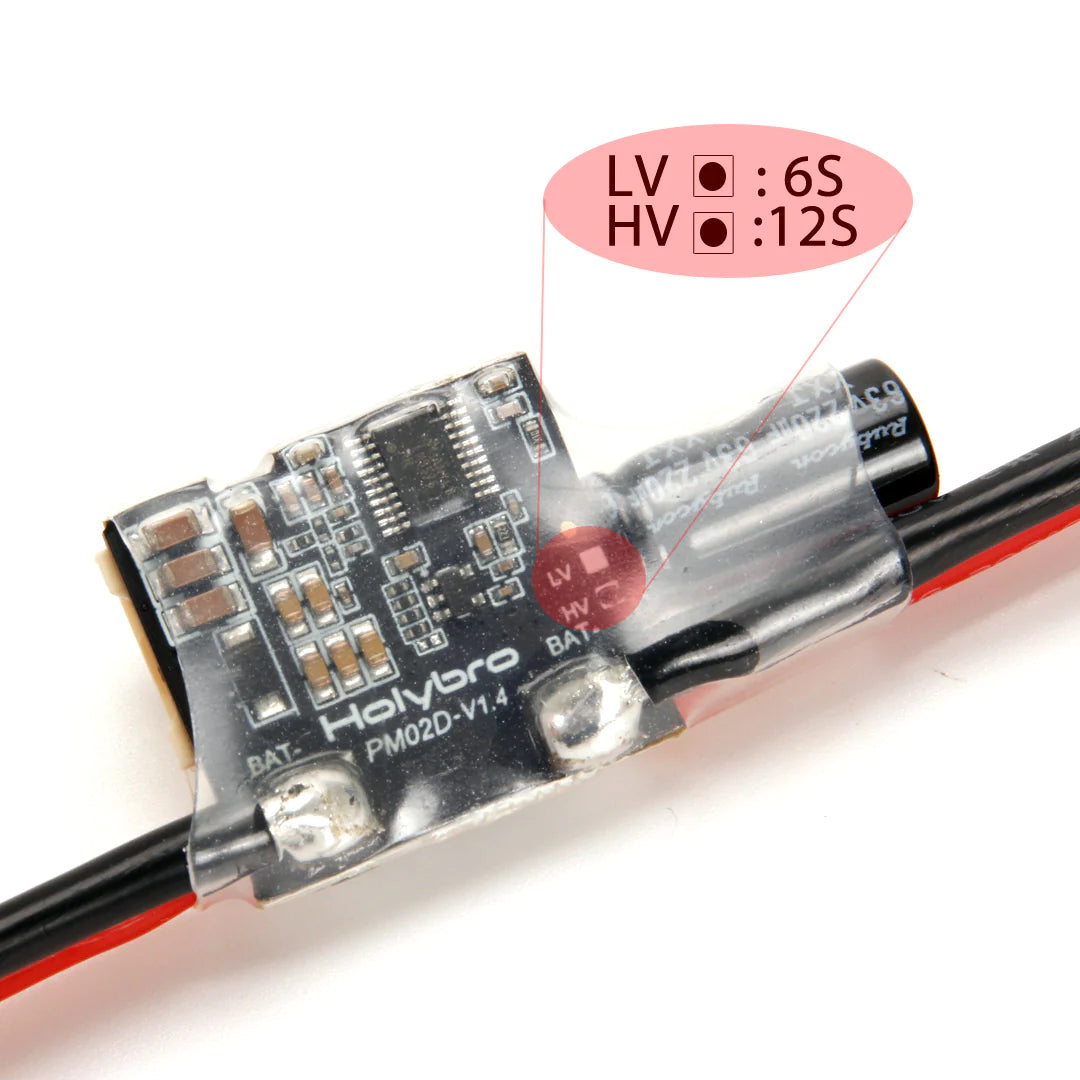
- Tensión de entrada
- LV: 2S-6S (descontinuado)
- HV: 2S-12S
- Continuación de PCB. Clasificación actual: 60A
- Clasificación de corriente de ráfaga de PCB: 100 A (<60 segundos)
- Detección de corriente máxima:
- LV: 164A (descontinuado)
- HV: 327A
- Monitor de voltaje y corriente con interfaz compatible con I2C
- Salidas 5,2 V y 3 A máx.
- Peso: 20g

Calificación actual:
El PM02D viene con enchufes XT60 con cables de silicona de 14 AWG clasificados para corriente continua de 30 A y corriente de ráfaga de 60 A (<1 minuto). Si se necesita una corriente mayor, el tipo de enchufe y el tamaño del cable se deben cambiar en consecuencia. Puede consultar este gráfico como referencia.
MAPA DE PIN:

Configuración:
Si está utilizando la versión PM02D HV, debe configurar SENS_EN_INA228 para habilitar.
Puede encontrar la guía de configuración completa aquí.
El paquete incluye:
Related Collections