


Mano robótica Inspire Robots RH56DFTP – 6 DOF, 30N de agarre, sensores táctiles de fuerza &, control ModbusTCP+CAN
Mano robótica Inspire Robots RH56DFTP – 6 DOF, 30N de agarre, sensores táctiles de fuerza &, control ModbusTCP+CAN
Inspire Robots
No se pudo cargar la disponibilidad de retiro
Overview
La Inspire Robots RH56DFTP Intelligent Bionic Robot Hand es una mano biónica inteligente de alta precisión y cinco dedos, diseñada para aplicaciones robóticas avanzadas. Con 6 grados de libertad, 12 articulaciones, y una combinación de 6 sensores de fuerza y 17 sensores táctiles, ofrece destreza y percepción táctil similares a las humanas. Con una fuerza en la yema del dedo de 30N (≈3 kg por dedo), movimiento angular de alta velocidad y comunicación ModbusTCP+CAN (RS485) sin interrupciones, esta mano es ideal para investigación, automatización industrial y robótica biónica.
Características Clave
-
Precisión táctil similar a la humana: Sensores táctiles integrados ofrecen percepción en tiempo real para una manipulación precisa de objetos.
-
Agarradera fuerte y estable: Cada dedo proporciona hasta 3 kg de fuerza de actuación, lo que permite un agarre confiable de varios objetos.
-
Autolock por pérdida de energía: Mantiene la posición cuando está apagado, eliminando la necesidad de volver a cero al iniciar.
-
Operación a alta velocidad: El movimiento del pulgar supera 130°/s, mientras que el movimiento de cuatro dedos alcanza 200°/s para un control receptivo.
-
Duradero y confiable: Diseñado para un uso a largo plazo en laboratorios de investigación, plataformas robóticas y entornos industriales.
Especificaciones
| Parámetro | Valor |
|---|---|
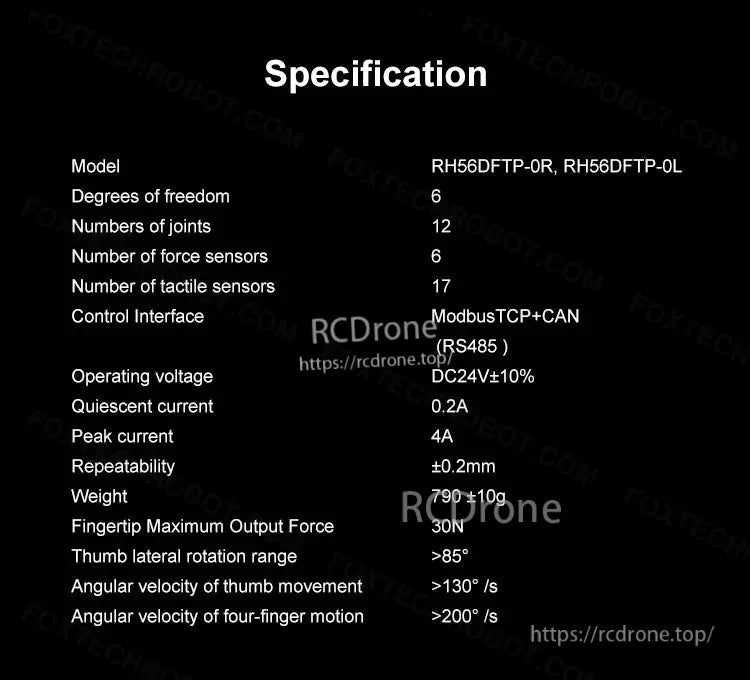
| Modelo | RH56DFTP-0R, RH56DFTP-0L |
| Grados de libertad | 6 |
| Número de juntas | 12 |
| Sensores de fuerza | 6 |
| Sensores táctiles | 17 |
| Interfaz de control | ModbusTCP + CAN (RS485) |
| Tensión de funcionamiento | DC 24V ±10% |
| Corriente en reposo | 0.2A |
| Corriente de pico | 4A |
| Repetibilidad | ±0.2mm |
| Peso | 790g ±10g |
| Fuerza máxima de salida en la yema del dedo | 30N (≈3 kg) |
| Rango de rotación lateral del pulgar | >85° |
| Velocidad angular – pulgar | >130°/s |
| Velocidad angular – cuatro dedos | >200°/s |
Aplicaciones
-
Investigación y Desarrollo: Investigación avanzada en robótica en universidades y laboratorios.
-
Automatización Industrial: Tareas de ensamblaje y manipulación de alta precisión.
-
Soluciones Biónicas: Estudios de manos prostéticas y robótica humanoide.
-
IA y Aprendizaje Automático: Proyectos de detección táctil y manipulación que requieren retroalimentación precisa en tiempo real.
Destacados
El RH56DFTP sobresale en tareas que requieren control de fuerza preciso y operaciones delicadas, como recoger arándanos, tomates cherry o uvas sin causar daños. También maneja agarres de alta fuerza para aplicaciones industriales robustas, lo que lo convierte en una solución versátil para tareas de manipulación complejas.
Detalles
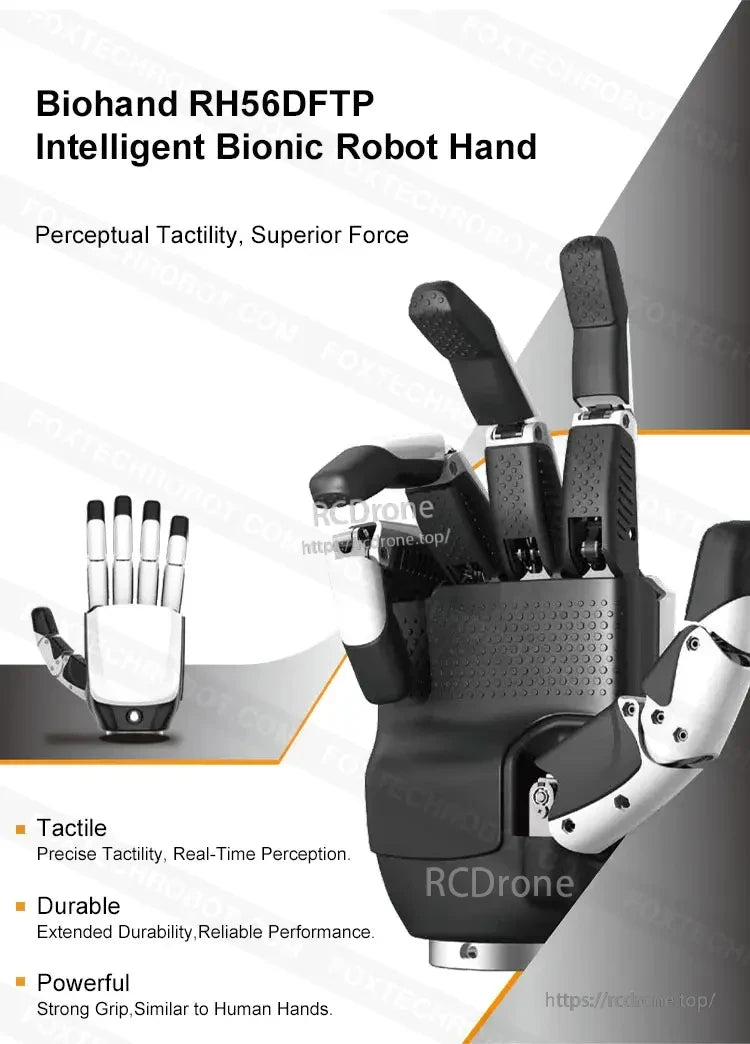
La mano robótica biónica inteligente Biohand RHS6DFTP ofrece tactilidad perceptual, fuerza superior y tactilidad precisa en tiempo real, con durabilidad extendida para un rendimiento confiable y un agarre fuerte y potente similar al de las manos humanas.

Mano robótica con seis grados de libertad, diseñada para precisión y destreza, perfecta para diversas aplicaciones como cirugía, ensamblaje o trabajo de laboratorio.

Agarre potente, rendimiento similar al humano. Fuerza de actuación de 3 kg por dedo. Mano robótica hábil con diseño avanzado y ingeniería de precisión.


Mecanismo de auto-bloqueo de pérdida de energía mantiene la posición estable y confiable sin necesidad de re-cero al inicio o apagado.


Herramienta manual multifuncional con sensor de fuerza, adecuada para recoger y pinzar frutas pequeñas como arándanos, tomates cherry y uvas.

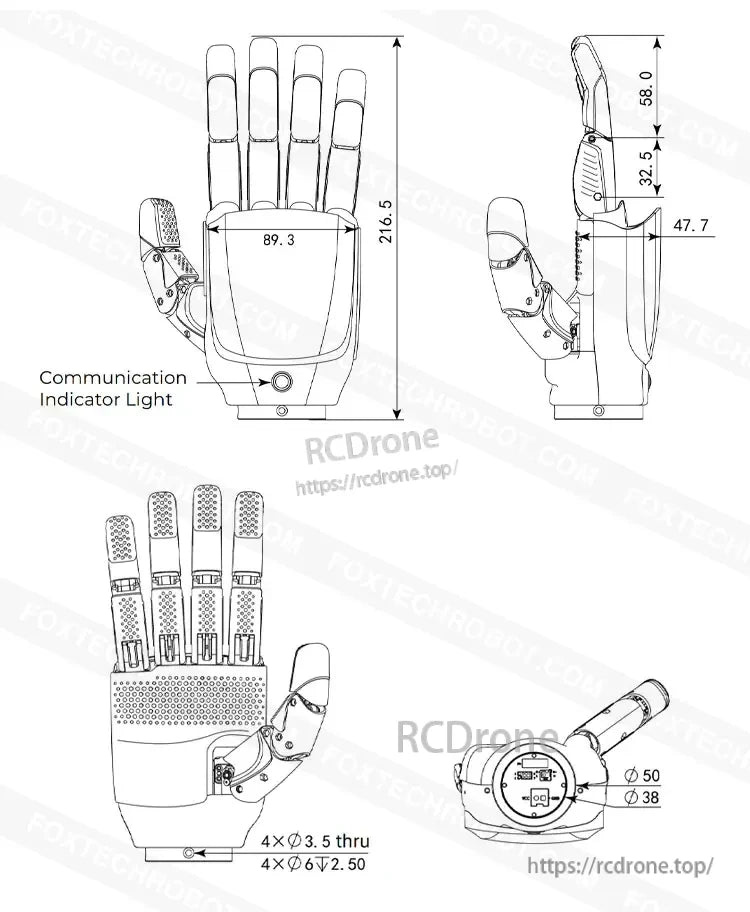
Indicador de comunicación, 8 x 47.7 mm, 89 mm de largo, sin LED, 5x5: 38-4x03.5 a 4xp6v2, 50 ohmios, 2 capas
El modelo de especificación RHS6DFTP-OR y RHS6DFTP-OL cuenta con 3 grados de libertad, 12 articulaciones y 17 sensores de fuerza y sensores táctiles. Utiliza interfaz de control Modbus TCP+CAN (RS485) con un voltaje de operación de DC24V +10%.



Related Collections


