



Mano robótica Inspire Robots RH56DFX – 6 DOF, 12 articulaciones, 30N de fuerza de agarre, RS485, sensores táctiles de fuerza &
Mano robótica Inspire Robots RH56DFX – 6 DOF, 12 articulaciones, 30N de fuerza de agarre, RS485, sensores táctiles de fuerza &
Inspire Robots
No se pudo cargar la disponibilidad de retiro
Descripción
La Inspire Robots RH56DFX Mano Robótica Dextrous es una mano robótica de alta precisión y alto rendimiento diseñada para aplicaciones versátiles en los campos de servicio, industrial e investigación. Con 6 grados de libertad, 12 articulaciones y repetibilidad submilimétrica, imita de cerca el movimiento y la destreza de una mano humana. Sensores de fuerza y táctiles integrados ofrecen un agarre y manejo precisos, mientras que un diseño robusto garantiza fiabilidad en entornos exigentes como el comercio minorista no tripulado, operaciones industriales y asistencia en rehabilitación.
Características Clave
-
6 Grados de Libertad y 12 articulaciones para movimientos de mano naturales y precisos
-
Repetibilidad submilimétrica para tareas de alta precisión
-
Sensores de fuerza (6) y táctiles (17) integrados para retroalimentación de agarre sensible
-
Tamaño real de mano para una integración perfecta con robots humanoides
-
Fuerza de agarre fuerte de hasta 30N de salida en la punta de los dedos y 10N de fuerza de agarre con cuatro dedos
-
Diseño ligero y duradero (540g–790g dependiendo de la configuración)
-
Interfaz de comunicación RS485 con entrada de potencia DC 24V±10%
Amplio rango de movimiento, incluyendo >85° de rotación del pulgar y >130°/s de velocidad angular del pulgar
Especificaciones Técnicas
| Parámetro | Valor |
|---|---|
| Grados de Libertad | 6 |
| Articulaciones | 12 |
| Interfaz de Control | RS485 |
| Voltaje de Operación | DC 24V ±10% |
| Corriente Estática | 0.2A |
| Corriente Máxima | 2A (versión de 540g) / 4A (versión de 790g) |
| Peso | 540g o 790±10g |
| Repetibilidad | ±0.20 mm (540g) / ±0.2 mm (790g) |
| Fuerza Máxima de Agarre con el Pulgar | 15N (540g) / 30N (790g) |
| Máximo Agarre con Cuatro Dedos | 10N |
| Resolución de Agarre | 0.50N |
| Rango de Rotación del Pulgar | >65° (540g) / >85° (790g) |
| Velocidad Angular del Pulgar | 107°/s (oscilación lateral) / >130°/s (movimiento) |
| Velocidad de Cuatro Dedos | 260°/s (doblar) / >200°/s (movimiento) |
| Sensores de Fuerza | 6 |
| Sensores Táctiles | 17 |
Aplicaciones
El RH56DFX es versátil y adaptable, ideal para:
-
Recepción de Bienvenida – Interacción humana atractiva para robots de servicio público
-
Retail No Tripulado – Agarre automatizado y manejo de objetos para soluciones de retail
Servicios de Construcción – Operación de herramientas, cerraduras y dispositivos en el mantenimiento de instalaciones
-
Servicio Familiar – Asistencia con tareas en el hogar y cuidado
-
Ayuda a Personas Mayores y Discapacitadas – Proporcionando asistencia con alta seguridad y precisión
-
Industrias Especiales – Manejo de materiales peligrosos o delicados en entornos industriales
Destacados
-
Destreza similar a la humana para interacción realista y precisa
-
Alta fiabilidad para operación continua en escenarios exigentes
-
Soporta investigación, servicio e integración industrial con protocolos de comunicación fáciles
Detalles


Mano robótica hábil con 6 grados de libertad, 6 actuadores de accionamiento lineal, agarre potente de hasta 5KG, control de posición de fuerza y aplicaciones versátiles en robótica, prótesis, automatización e investigación.

Mano robótica hábil con 6 DOF, 12 articulaciones, repetibilidad submilimétrica, tamaño real, sensor de fuerza y capacidad de carga de varios kilogramos.
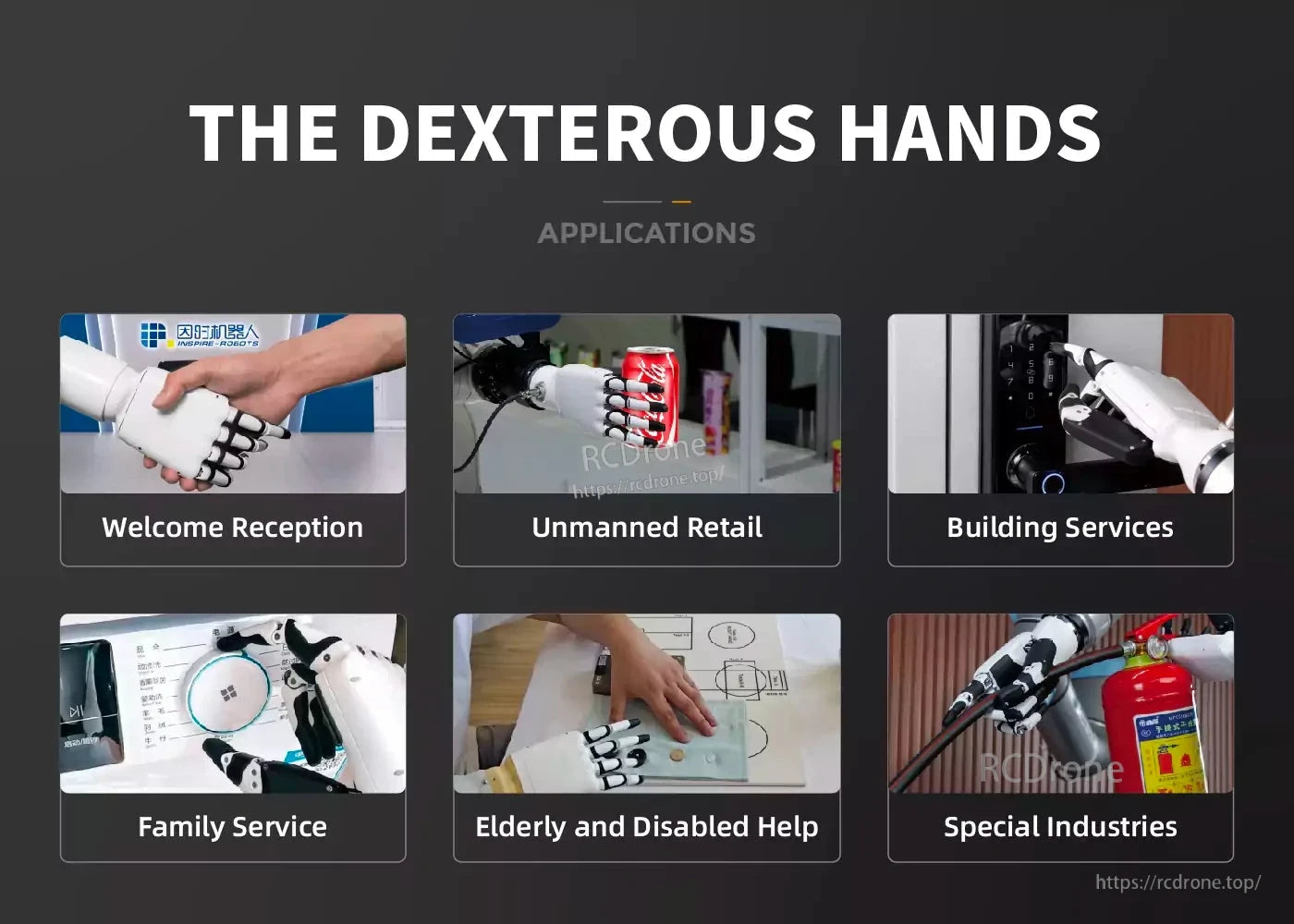
Aplicaciones de la mano robótica hábil: recepción, venta al por menor, servicios de construcción, cuidado familiar, asistencia a personas mayores, industrias especiales.
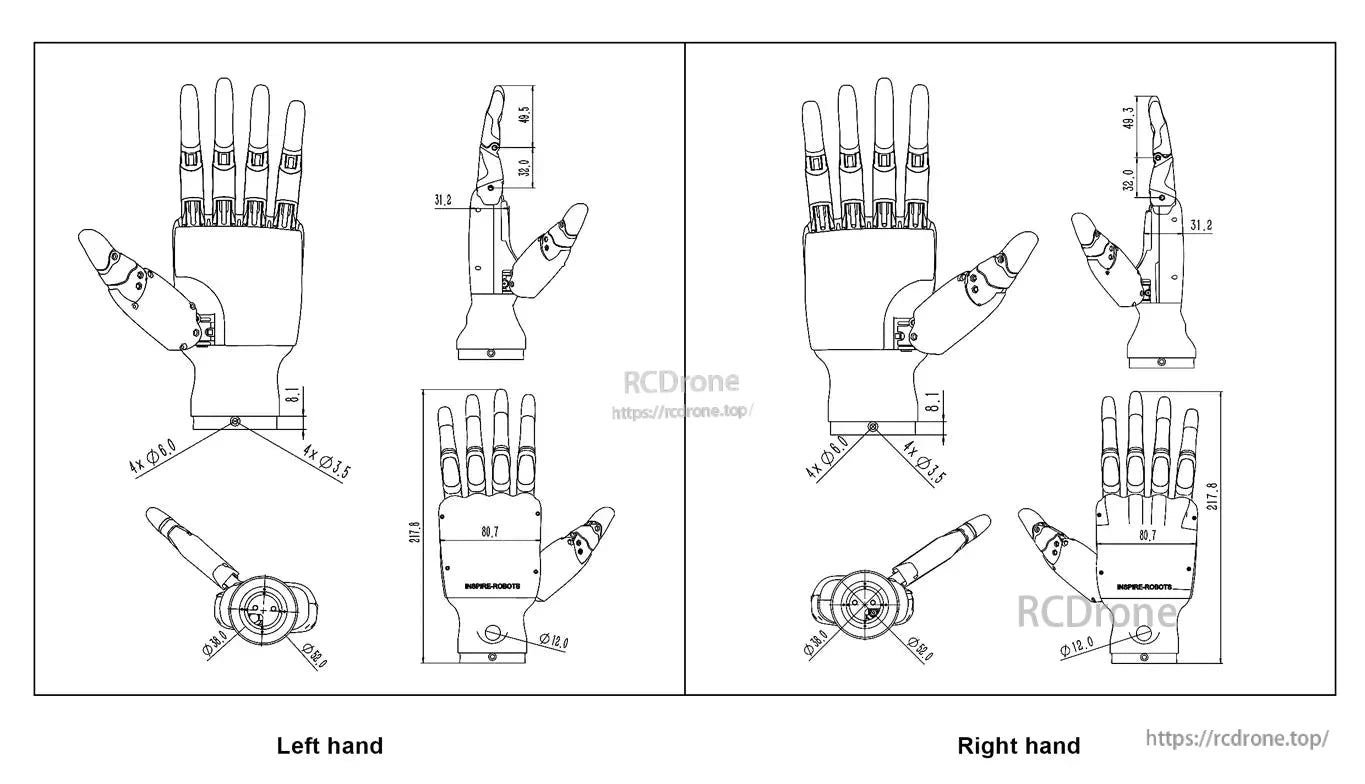
Dibujo técnico de la mano robótica hábil Inspire Robots RH56DFX con dimensiones

Related Collections



