

Serie JUXIE INTELLIGENT CE-HM-R83, 48 V 250 W, 51:1/101:1/161:1, Motor robótico con codificadores duales de 19 bits para articulaciones humanoides
Serie JUXIE INTELLIGENT CE-HM-R83, 48 V 250 W, 51:1/101:1/161:1, Motor robótico con codificadores duales de 19 bits para articulaciones humanoides
JUXIE INTELLIGENT
No se pudo cargar la disponibilidad de retiro
Resumen
La serie JUXIE INTELLIGENT CE-HM-R83 es un módulo de motor y articulación robótica integrada para robótica humanoide y móvil. Combina un reductor armónico de alta precisión, un motor de par sin marco y codificadores magnéticos duales en un factor de forma compacto R83. Tres configuraciones (51:1, 101:1, 161:1) proporcionan un par nominal de hasta 84 Nm con un retroceso de 15 arcsec. El controlador integrado soporta EtherCAT/CAN con un bucle de corriente de 50KHz y un bucle de velocidad de 10KHz. El uso típico incluye articulaciones de hombro, codo, rodilla y cintura. Las dimensiones generales son R83*59mm y el peso es de 1.1kg.
Características Clave
- Reductor armónico integrado + motor de par sin marco + codificador magnético dual de alta precisión.
- Codificadores duales con valor absoluto de una vuelta: 19 bits por vuelta.
- Relaciones de transmisión: 51:1, 101:1, 161:1; par nominal 27/53/84 Nm, par máximo 66/120/200 Nm.
- Retroceso: 15 arcsec en todas las configuraciones.
- Clasificaciones eléctricas: 48 V, 250 W, velocidad nominal 3000 RPM, corriente nominal 6 A, corriente de pico 16 A.
- Interfaz del controlador: EtherCAT/CAN; bucle de corriente 50KHz; bucle de velocidad 10KHz.
- Compacto y ligero: R83*59mm, 1.1kg; diseño de eje hueco.
Especificaciones
| Parámetro | 51:1 | 101:1 | 161:1 |
|---|---|---|---|
| Velocidad de Salida (RPM) | 60 | 30 | 18 |
| Par Nominal (Nm) | 27 | 53 | 84 |
| Par Máximo (Nm) | 66 | 120 | 200 |
| Juego (Arcsec) | 15 | 15 | 15 |
| Tensión Nominal (V) | 48 | 48 | 48 |
| Potencia Nominal (W) | 250 | 250 | 250 |
| Velocidad Nominal (RPM) | 3000 | 3000 | 3000 |
| Corriente Nominal (A) | 6 | 6 | 6 |
| Corriente de pico (A) | 16 | 16 | 16 |
| Encoder | Encoders duales; valor absoluto de una vuelta: 19 bits por vuelta | Encoders duales; valor absoluto de una vuelta: 19 bits por vuelta | Encoders duales; valor absoluto de una vuelta: 19 bits por vuelta |
| Driver | Interfaz: EtherCAT/CAN; Bucle de corriente: 50KHz; Bucle de velocidad: 10KHz | Interfaz: EtherCAT/CAN; Bucle de corriente: 50KHz; Bucle de velocidad: 10KHz | Interfaz: EtherCAT/CAN; Bucle de corriente: 50KHz; Bucle de velocidad: 10KHz |
| Dimensiones generales | R83*59mm | R83*59mm | R83*59mm |
| Peso total | 1.1kg | 1.1kg | 1.1kg |
| Aplicaciones Típicas | articulación del hombro, articulación del codo, articulación de la rodilla, articulación de la cintura. | articulación del hombro, articulación del codo, articulación de la rodilla, articulación de la cintura. | articulación del hombro, articulación del codo, articulación de la rodilla, articulación de la cintura. |
Aplicaciones
- Robots Humanoides
- Brazos Robóticos
- Exoesqueletos
- Robots Cuadrúpedos
- Vehículos AGV
- Robots ARU
Manuales
- Diagrama de Estructura del Producto HM-R83 (PDF)
- Especificación de Comunicación Serial SC-0090-C001 (PDF)
Detalles
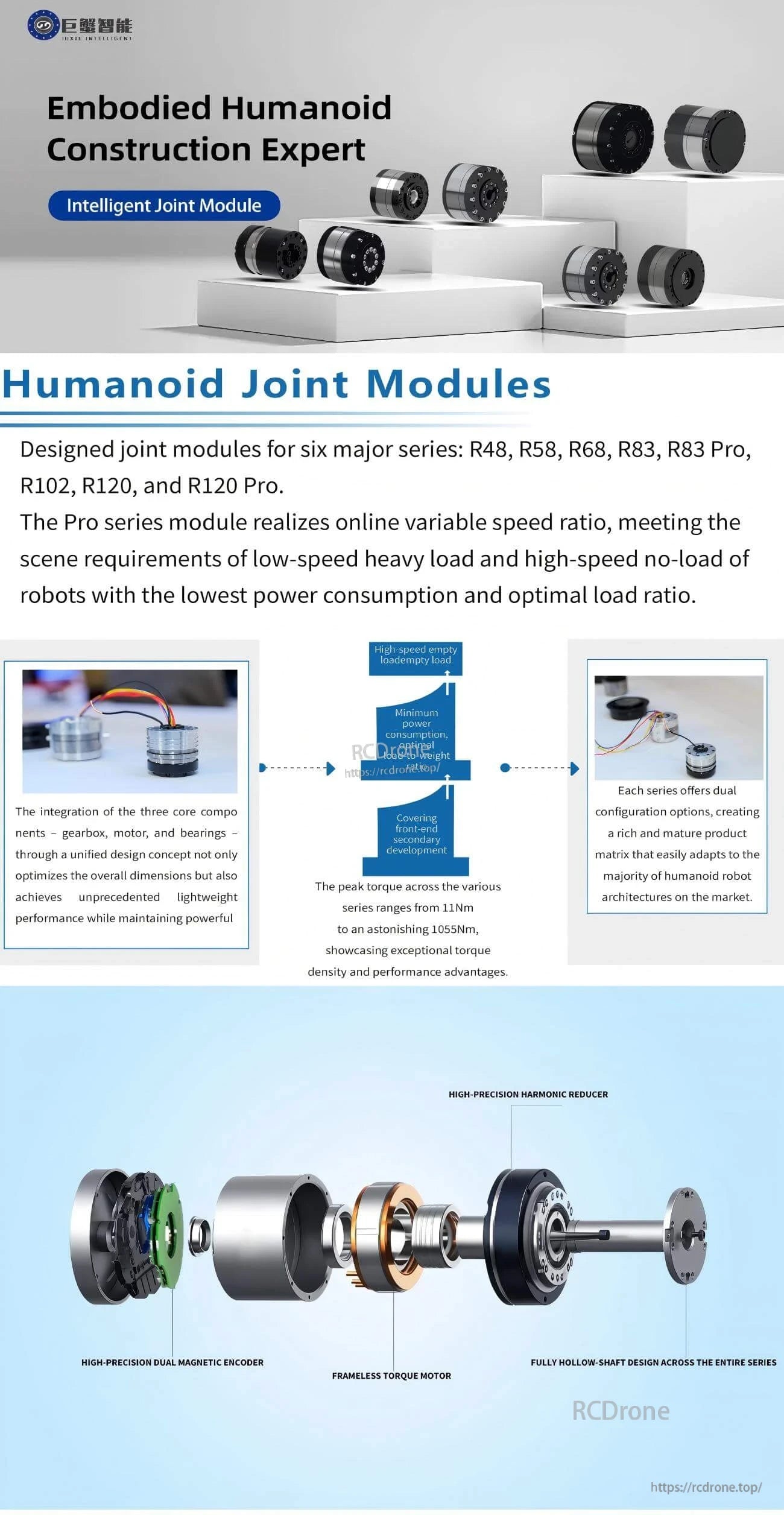
Módulos de articulación inteligentes para robots humanoides, con reductor armónico de alta precisión, codificador magnético dual, motor de par sin marco y diseño de eje hueco. Ofrece velocidad variable, bajo consumo de energía y par máximo de hasta 1055Nm.

Related Collections

