













LINKERBOT Mano Robótica Linker Hand L10, 10 DoF, Control CAN/RS485, Transmisión de Tornillo Sin Fin, Agarre de 80N, DC24V+/-10%
LINKERBOT Mano Robótica Linker Hand L10, 10 DoF, Control CAN/RS485, Transmisión de Tornillo Sin Fin, Agarre de 80N, DC24V+/-10%
LINKERBOT
No se pudo cargar la disponibilidad de retiro
Resumen
LINKERBOT La mano robótica Linker Hand L10 está diseñada para manipulación hábil y control preciso. Cuenta con 10 grados de libertad con transmisión de engranaje de gusano y se comunica a través de CAN/RS485 para una integración confiable en sistemas de investigación e industriales.
Características clave
- Mano hábil de 10 DoF con transmisión de engranaje de gusano para una actuación estable.
- Interfaces de control: CAN y RS485.
- Precisión de posicionamiento repetido < +/-0.2mm; tiempo típico de apertura/cierre 1.2s.
- Capacidad de fuerza: 15N fuerza máxima en la yema del pulgar, 15N fuerza máxima en la yema de los cuatro dedos, 80N fuerza máxima de agarre con cinco dedos.
- Modos de control y utilidades del manual del producto: control de posición, control de velocidad, retroalimentación háptica (control de fuerza) a través de sensores en las yemas de los dedos, y actualización de firmware en línea.
- Ecosistema (por materiales del producto): brazos robóticos soportados UR, Franka, XArm, RealMan, AgileX; simuladores soportados Pybullet, Isaac, MuJoCo; ejemplos de uso incluyen ROS1, ROS2, Python, C++; métodos de adquisición de datos incluyen guantes de teleoperación, guantes de exoesqueleto, guantes de detección de metal líquido, visión y VR (Meta Quest 3).
Para soporte de preventa o integración, contacta [email protected] or visita https://rcdrone.top/.
Especificaciones
| Grados de Libertad (DoF) | 10 |
| Número de Juntas | 20 (10 Activas + 10 Pasivas) |
| Modo de Transmisión | Transmisión por Engranaje de Tornillo |
| Interfaz de Control | CAN/RS485 |
| Peso | 800g |
| Carga Máxima | 25kg |
| Tensión de Funcionamiento | DC24V+/-10% |
| Corriente Estática | 0.2A |
| Corriente Promedio (Movimiento Sin Carga) | 0.5A |
| Corriente Máxima | 3A |
| Precisión de Repetición de Posicionamiento | < +/-0.2mm |
| Tiempo de Apertura/Cierre | 1.2s |
| Fuerza máxima en la yema del pulgar | 15N |
| Fuerza máxima en la yema de cuatro dedos | 15N |
| Fuerza máxima de agarre con cinco dedos | 80N |
Sensor de presión
| Array piezorresistivo | 6*12 |
| Área de carga del sensor | 9.6*14.4mm |
| Fuerza de activación | 5g |
| Rango de medición | 20N |
| Vida útil | 100,000 ciclos |
| Tasa de cuadro de comunicación | 200FPS |
Sensor capacitivo (opcional)
| Frecuencia de muestreo | >=50Hz |
| Rango de medición | 0-30N |
| Límite de sobrecarga | 60N |
| sensibilidad a la presión | 0.1N |
| Resolución de medición | 0.5%FS |
| Precisión de medición | 2%FS |
| Resolución de presión | 0.25N |
| Resolución de Dirección | 45° |
| Distancia de Detección | 1cm (Metal, Cuerpo Humano) |
Qué Incluye
- Cable de Depuración USB-a-CAN x1
- Cable Conector XT30 (2+2) x1
- Adaptador de Corriente x1
- Cable de Alimentación x1
- Linker Hand L10 x1
Aplicaciones
- Investigación y educación en manipulación hábil utilizando ROS1/ROS2 y simuladores (Pybullet, Isaac, MuJoCo).
- Teleoperación a través de guantes, guantes de exoesqueleto, guantes de detección de metal líquido, visión y VR (Meta Quest 3).
- Ensamblaje de precisión, operaciones basadas en trayectorias, apriete de tornillos, agarre de láminas delgadas y manejo general de objetos.
Manuales
Linker_Hand_L10_Product_Manual.pdf
Detalles

El Linker Hand L10 ofrece 10 DOF, movimiento preciso a través de un mecanismo de enlace y controladores de motor personalizados. Soporta UR, Franka, ROS, Python, VR, Pybullet, CAN y más para una integración y control robótico versátil.
El Linker Hand L10 proporciona alta destreza, con cada dedo ofreciendo 4 grados de libertad para operaciones precisas. Su sistema multi-sensor, equipado con cámaras y piel electrónica, proporciona una conciencia ambiental integral e interacción adaptativa. A través de la integración en la nube, los usuarios pueden desplegar rápidamente la mano a través de un servicio de biblioteca de habilidades en la nube sin código, lo que permite una personalización eficiente mientras se reduce la complejidad operativa. Juntas, estas capacidades soportan una amplia gama de aplicaciones complejas, mejorando tanto la precisión como la facilidad de uso sin requerir programación o configuración extensiva.

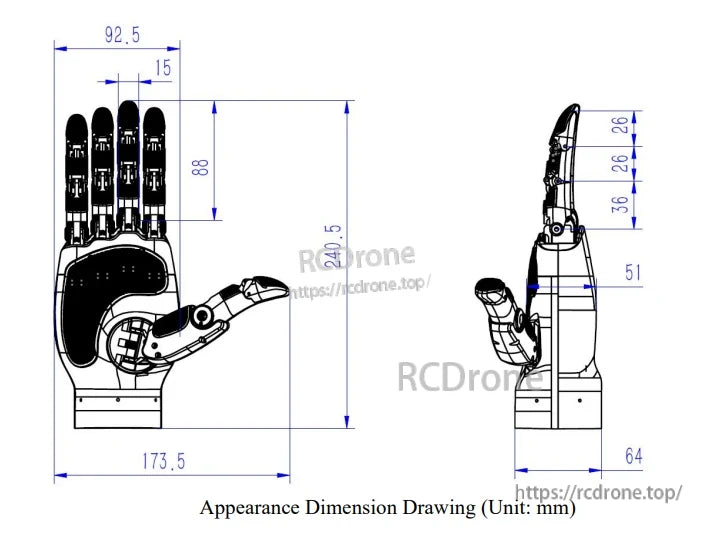
Dimensiones de la mano robótica en milímetros, mostrando vistas frontal y lateral con medidas precisas para el diseño y ensamblaje.
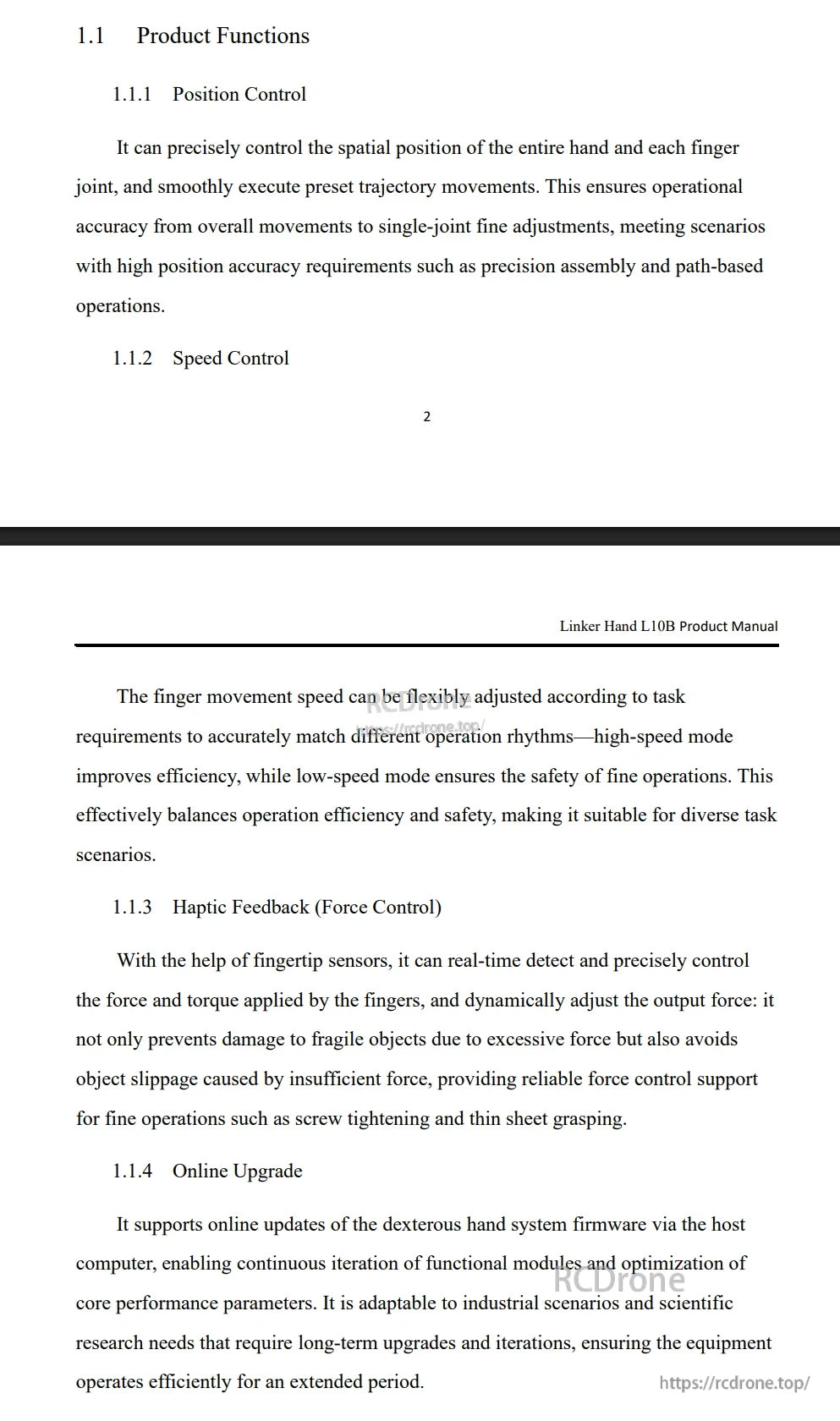
La mano Linker L10B ofrece control preciso de posición y velocidad, retroalimentación háptica para la gestión de fuerza y actualizaciones de firmware en línea. Diseñada para precisión, seguridad y adaptabilidad en aplicaciones industriales y de investigación que requieren manipulación fina y rendimiento a largo plazo.
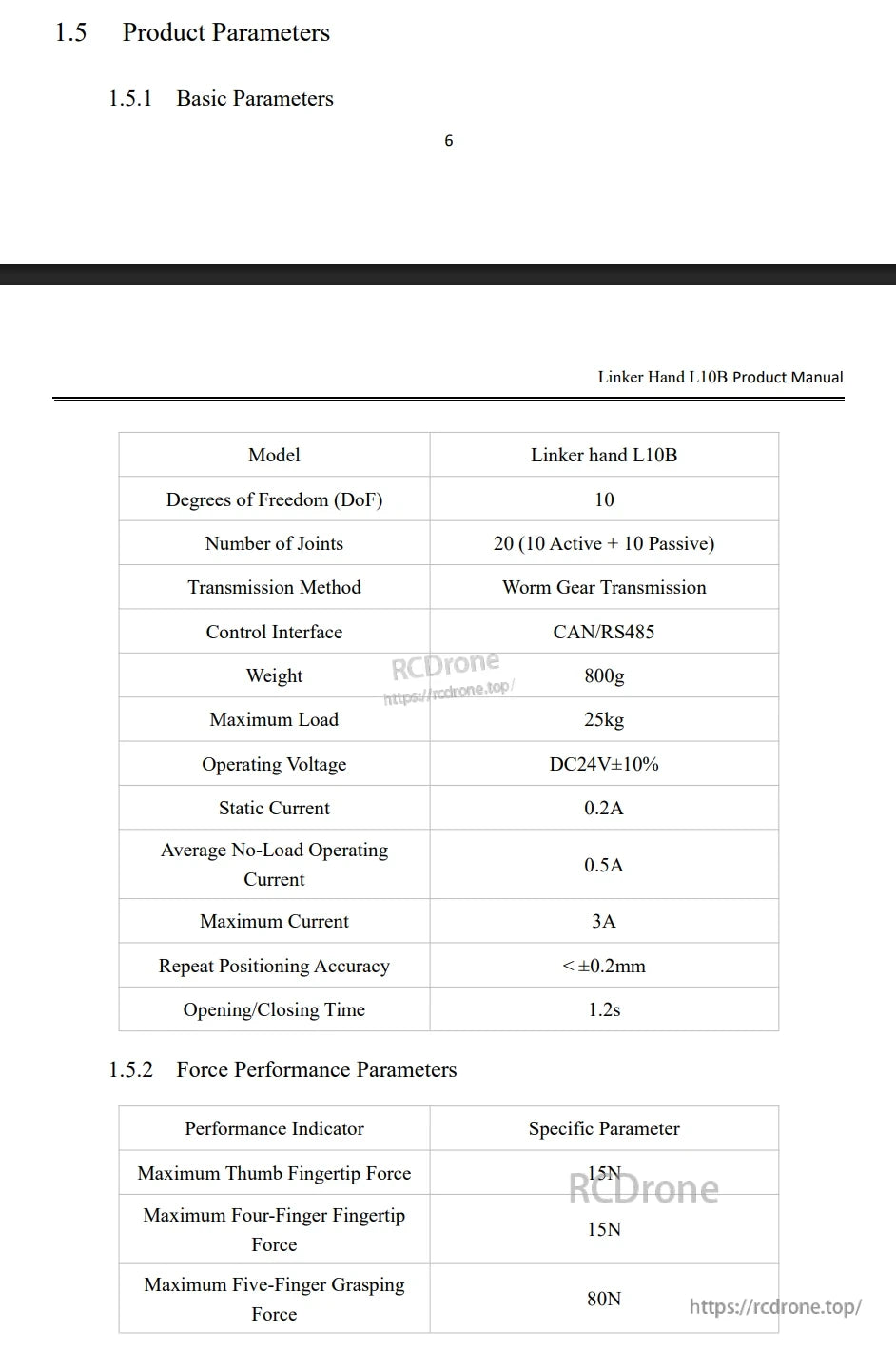
La mano Linker L10B ofrece 10 DoF, 20 articulaciones, transmisión de engranaje de gusano y control CAN/RS485. Con un peso de 800g, maneja hasta 25kg a DC24V, proporcionando posicionamiento preciso y fuerzas de agarre de hasta 80N.

Cuenta con una matriz piezorresistiva de 6x12 (rango de 20N, 100k ciclos). Sensor capacitivo opcional: ≥50Hz de muestreo, rango de 0–30N, resolución de dirección de 45°, detecta metal o cuerpo humano a 1cm.
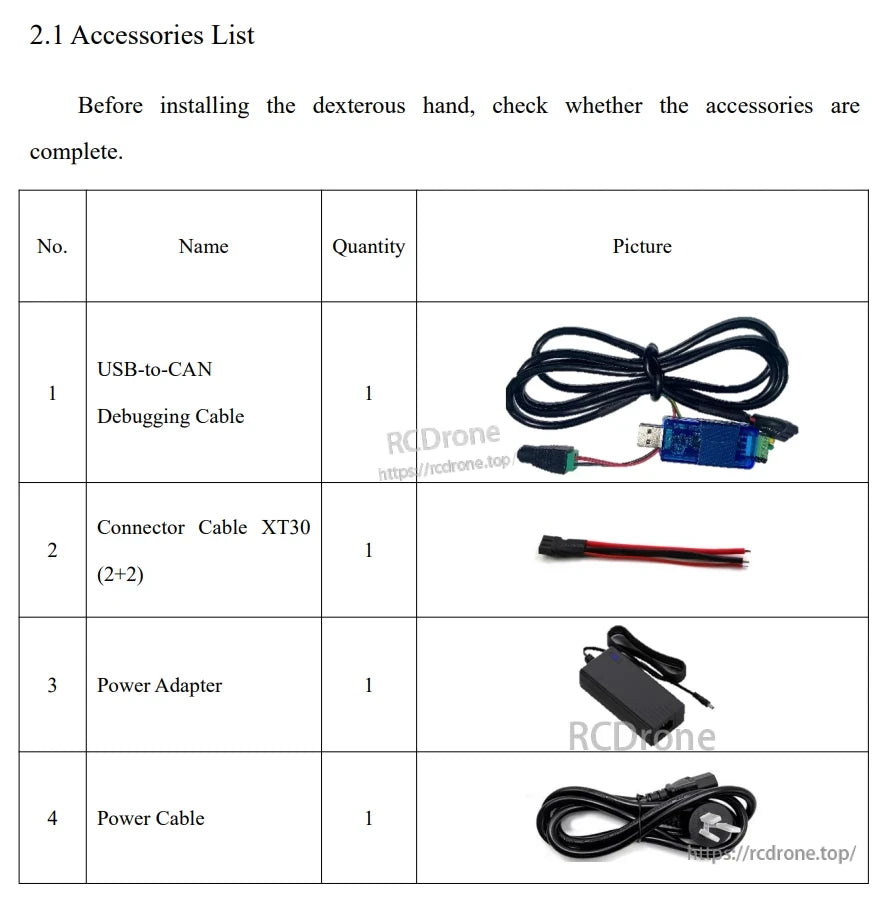
Lista de accesorios para la instalación de la mano hábil: cable USB a CAN, conector XT30, adaptador de corriente y cable de alimentación, cada uno en cantidad uno.
Related Collections













