







LINKERBOT Mano Robótica Linker Hand L6, 6 DoF, CAN, Transmisión por Eslabones, 50N de Agarre, Repetibilidad ±0,2mm
LINKERBOT Mano Robótica Linker Hand L6, 6 DoF, CAN, Transmisión por Eslabones, 50N de Agarre, Repetibilidad ±0,2mm
LINKERBOT
No se pudo cargar la disponibilidad de retiro
Descripción
LINKERBOT La mano robótica Linker Hand L6 es una mano robótica hábil diseñada para una manipulación precisa. Cuenta con 6 grados de libertad (DoF) y 11 articulaciones (6 activas + 5 pasivas) con una transmisión de enlace y una interfaz de control CAN. La estructura mostrada en las imágenes del producto destaca dedos de metal completo, silicona resistente al desgaste en las yemas de los dedos, sensores de presión táctil de cinco dedos, luces indicadoras, una almohadilla de goma anti-pellizco en la mitad de la palma y un cilindro eléctrico de alta precisión con accionamiento directo.
Características clave
- Manipulación hábil de 6 DoF; 11 articulaciones (6 activas + 5 pasivas).
- Transmisión de enlace con control de bus CAN.
- Precisión de posicionamiento repetido: ±0.2mm.
- Capacidad de fuerza: fuerza máxima en la punta del pulgar 10N; fuerza máxima en la punta de cuatro dedos 8N; fuerza máxima de agarre con cinco dedos 50N.
- Array de sensores táctiles piezoresistivos de cinco dedos para medición de contacto/presión.
- Elementos de diseño mostrados: dedos de metal completo, puntas de silicona resistentes al desgaste, luz indicadora, almohadilla de goma anti-pellizco.
- Diseño compacto &y ágil; sistema multi-sensor (incluyendo cámaras y piel electrónica) e integración de dispositivo-nube como se muestra en las imágenes del producto.
Para ventas y soporte técnico, contacte [email protected] or visite https://rcdrone.top/.
Especificaciones
| Parámetro | Valor |
|---|---|
| Grados de Libertad (DoF) | 6 |
| Número de Juntas | 11 (6 Activas + 5 Pasivas) |
| Modo de Transmisión | Transmisión por Vínculo |
| Interfaz de Control | CAN |
| Peso | 623.5g |
| Carga Máxima | 28kg |
| Tensión de Funcionamiento | DC24V±10% |
| Corriente Estática | 0.2A |
| Corriente Promedio (Movimiento Sin Carga) | 0.75A |
| Corriente Máxima | 1.4A |
| Precisión de Reposición | ±0.2mm |
| Fuerza máxima de la punta del pulgar | 10N |
| Fuerza máxima de la punta de cuatro dedos | 8N |
| Fuerza máxima de agarre de cinco dedos | 50N |
Rendimiento de movimiento
| Parte en movimiento | Rango de ángulo (°) | Velocidad de movimiento (°/s) |
|---|---|---|
| Base del pulgar | 57 | 152.82 |
| Base del dedo índice | 72.30 | 213.27 |
| Base del dedo medio | 72.90 | 208.29 |
| Base del dedo anular | 73.10 | 202.49 |
| Base del dedo meñique | 72.60 | 201.11 |
| Punta del pulgar | 69.90 | 192.84 |
| Punta del dedo índice | 64.60 | 192.84 |
| Punta del dedo medio | 65.10 | 185.32 |
| Punta del dedo anular | 66.90 | 185.32 |
| Punta del dedo meñique | 66.70 | 184.76 |
| Movimiento lateral del pulgar | 80 | 235.29 |
| Horario de apertura y cierre | - | 0.35s |
Sensores
| Parámetro | Especificación |
|---|---|
| Array piezorresistivo | 6*12 |
| Área de carga del sensor | 9.6*14.4mm |
| Fuerza de activación | 5g |
| Rango de medición | 20N |
| Vida útil | 100,000 ciclos |
| Tasa de comunicación | 200FPS |
| Rango de valores | 0~4095 |
Dimensiones de apariencia
| Definición | Parámetro (mm) |
|---|---|
| Longitud desde la punta del dedo medio hasta la base de la palma | 190.7 |
| Anchura máxima de la palma | 121 |
| Longitud desde la punta del pulgar hasta la base de la palma | 134.3 |
| Altura de la muñeca | 9.5 |
| Diámetro de la muñeca | 60 |
Qué incluye
- Cable de depuración USB‑a‑CAN x1
- Cable de conector XT30 (2+2) x1
- Adaptador de corriente x1
- Cable de alimentación x1
- Linker Hand L6 x1
Aplicaciones
- Agarre de precisión y manipulación de objetos
- Agarre y manipulación de herramientas
- Tareas de recogida y colocación de componentes
Manuales
Manual del producto Linker Hand L6 (PDF)
Detalles


Mano robótica hábil de alto rendimiento con 6 grados de libertad. Presenta agilidad compacta, sistema multi-sensor y integración dispositivo-nube para un control preciso, adaptación ambiental y personalización sin código a través de la biblioteca de habilidades en la nube.



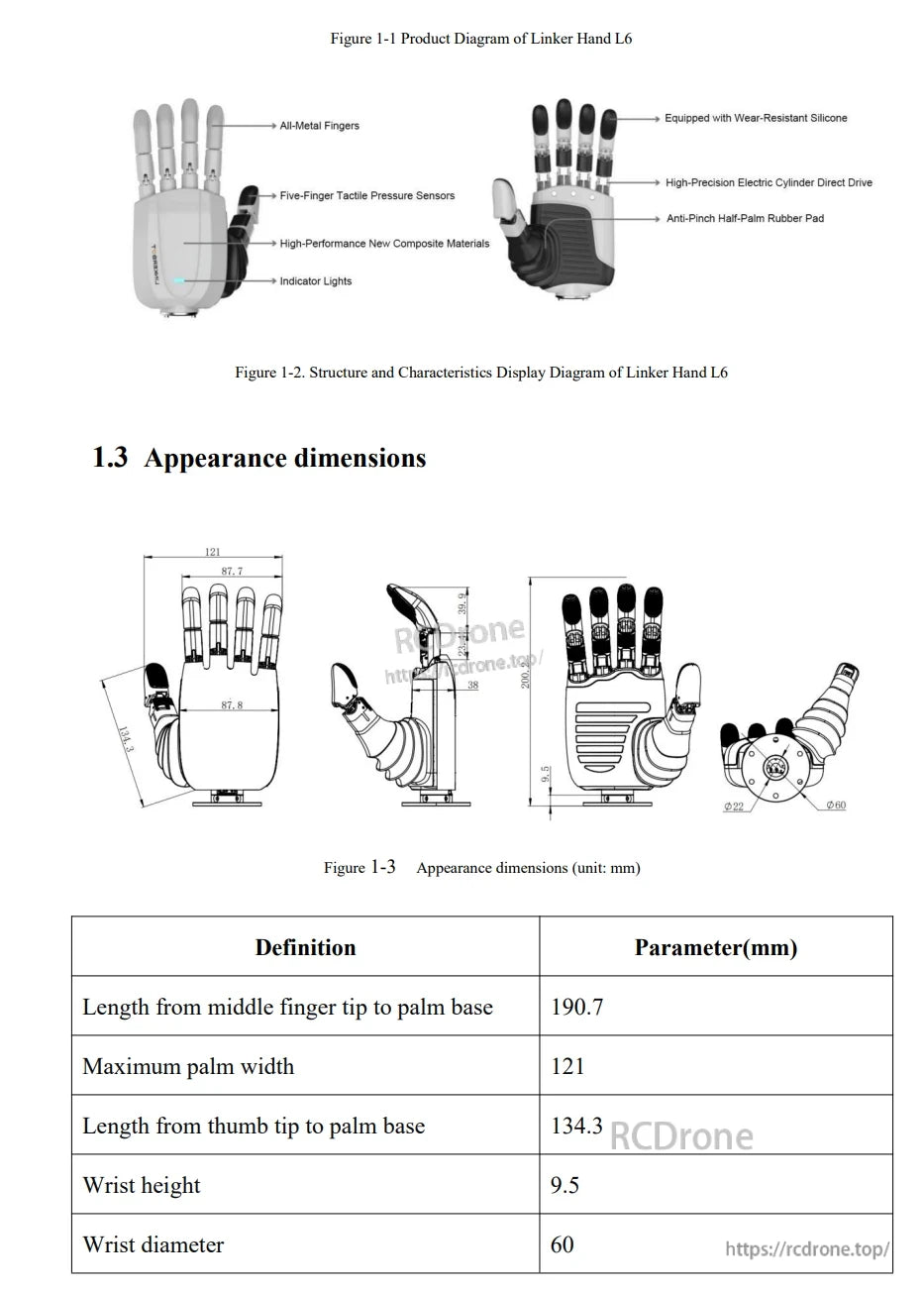
El Linker Hand L6 tiene dedos de metal completo, sensores táctiles, silicona resistente al desgaste, accionamiento por cilindro eléctrico y almohadilla de goma anti-pinchazo. Longitud del dedo: 190.7mm; ancho de la palma: 121mm; diámetro de la muñeca: 60mm.
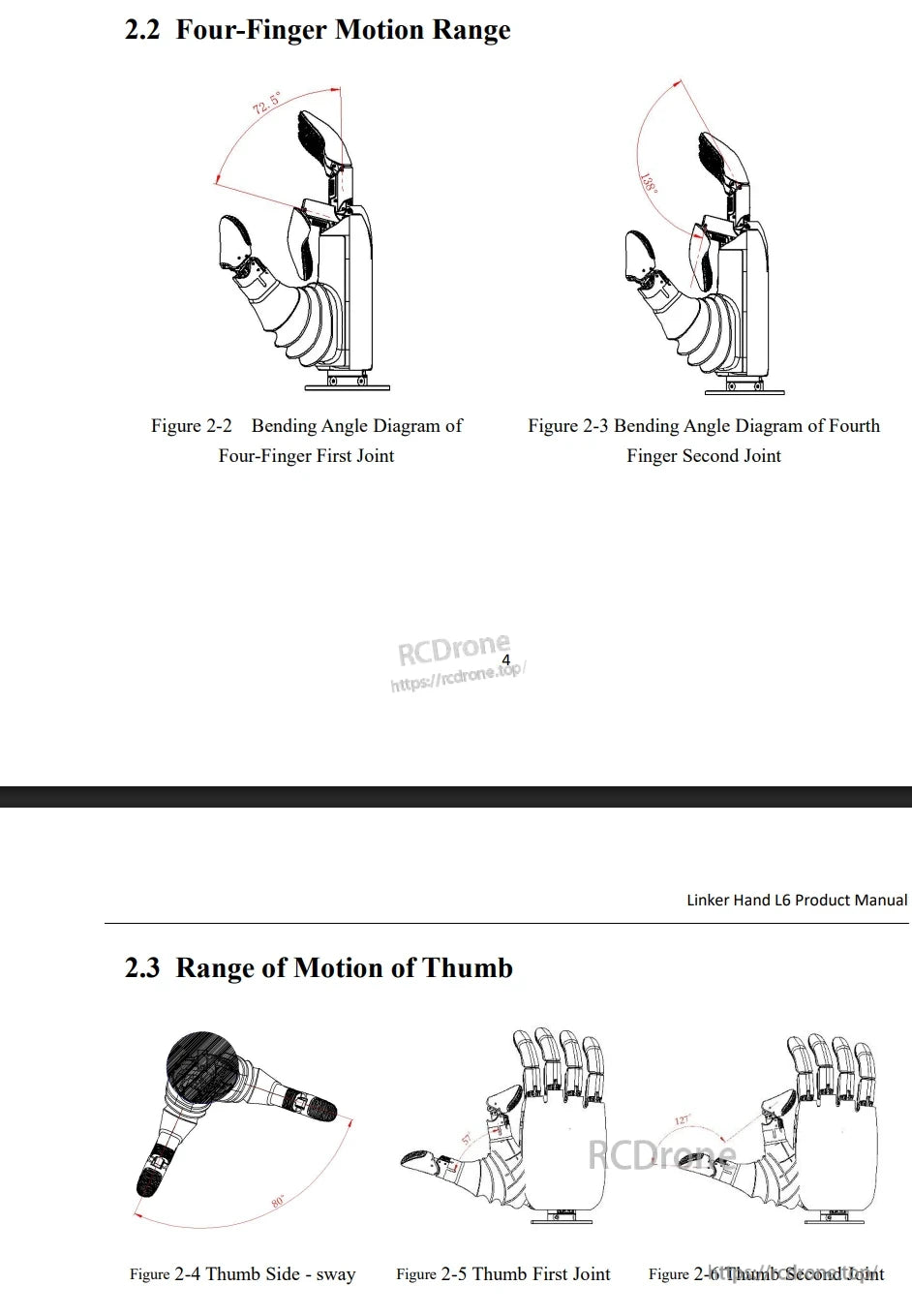
Rangos de movimiento de las articulaciones del dedo y el pulgar: primer articulación de cuatro dedos 72.5°, segunda articulación 138°; movimiento lateral del pulgar 80°, primera articulación 57°, segunda articulación 127°.
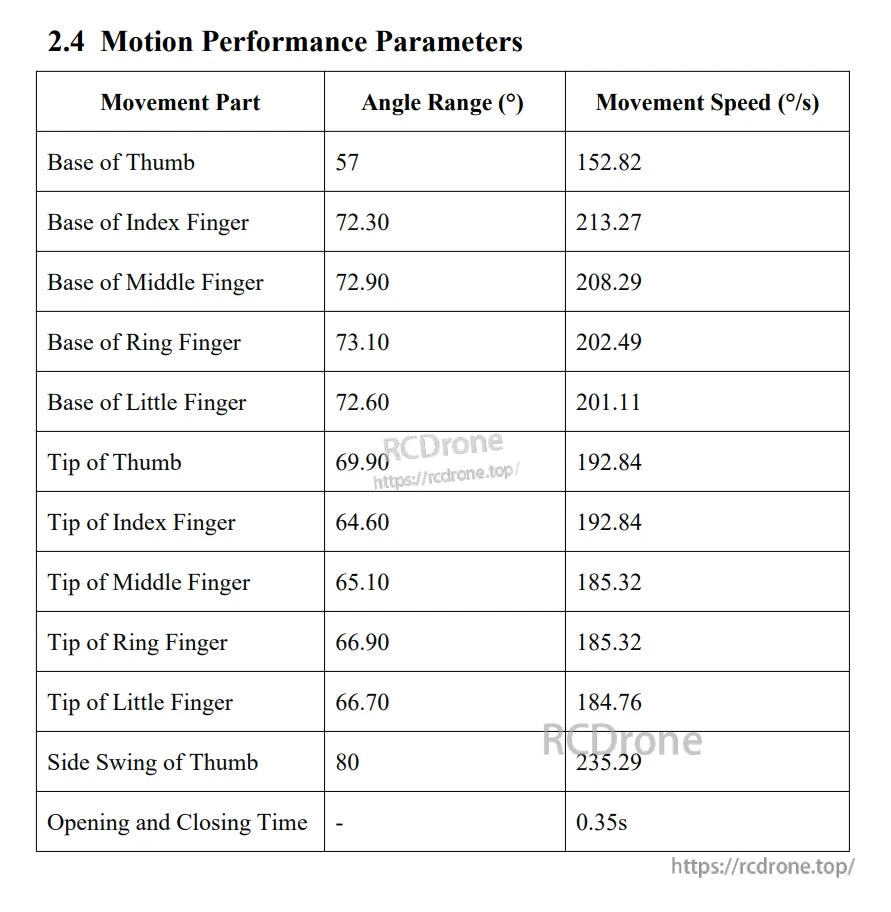
Parámetros de movimiento de los dedos de la mano robótica: oscilación del pulgar a 235.29°/s, apertura/cierre en 0.35 segundos—mostrando una articulación precisa con rangos de ángulo de articulación y velocidades detalladas.
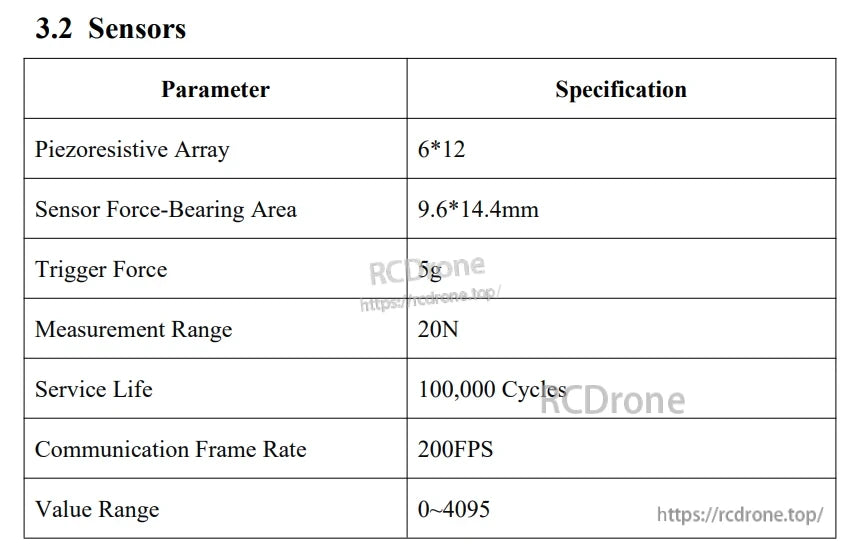
Especificaciones del sensor: matriz 6x12, área de 9.6x14.4mm, disparador de 5g, rango de 20N, 100k ciclos, 200FPS, rango de valores de 0-4095.
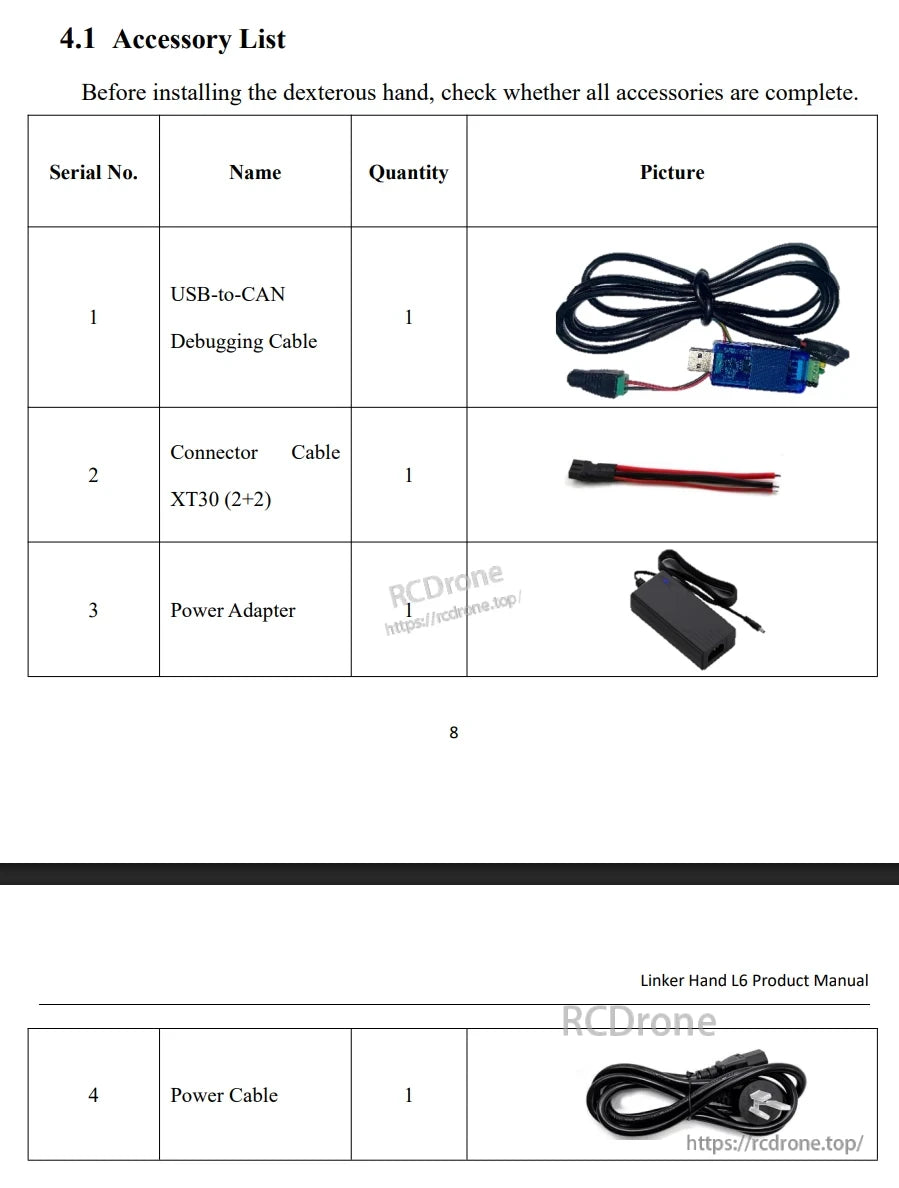
Lista de accesorios para el Linker Hand L6: cable USB a CAN, conector XT30, adaptador de corriente y cable de alimentación. Verifique la integridad antes de la instalación.
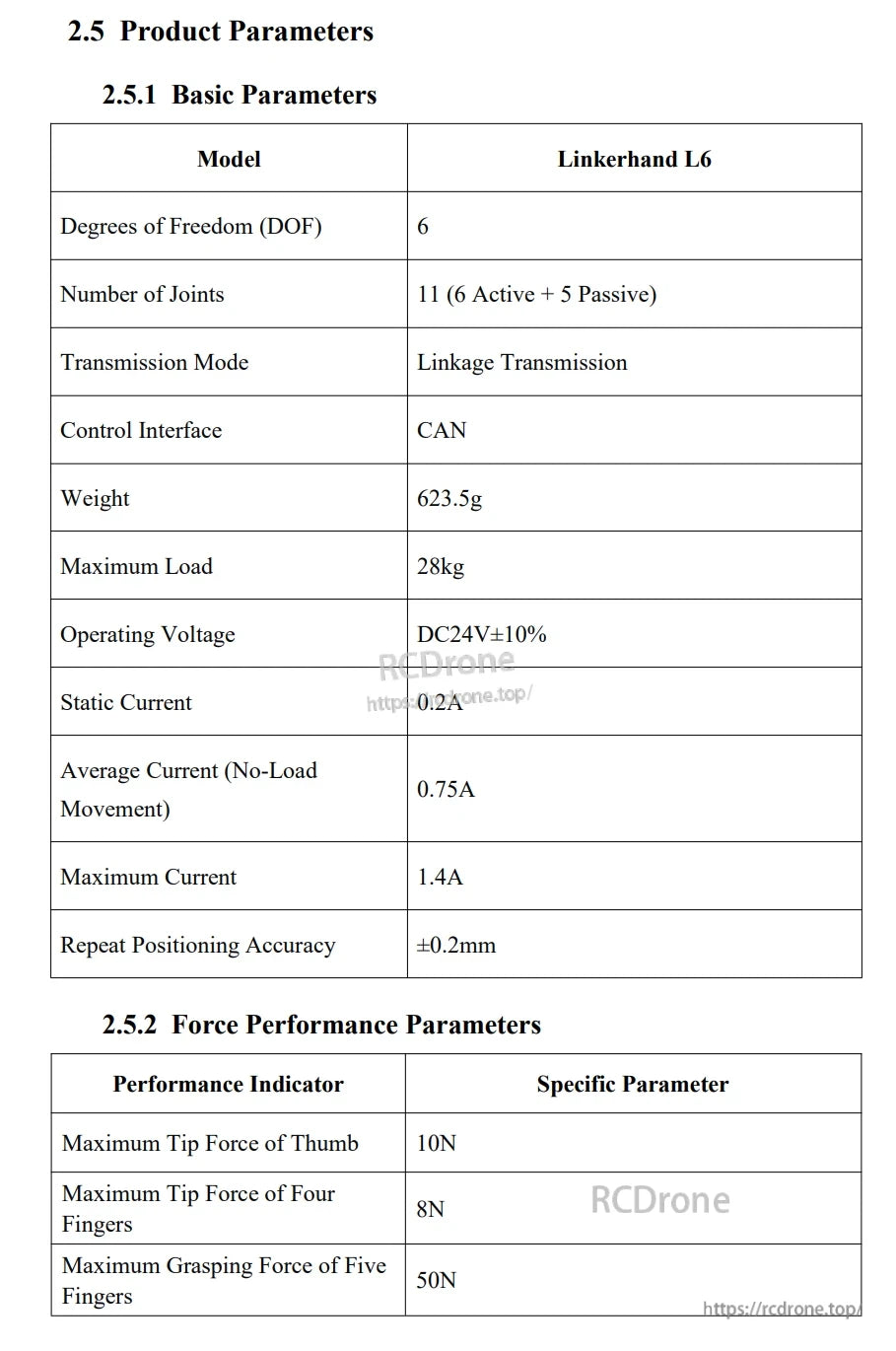
La mano robótica Linkerhand L6 tiene 6 DOF, 11 articulaciones, control CAN, pesa 623.5g, maneja una carga máxima de 28kg, funciona con DC24V±10%, ofrece una precisión de ±0.2mm y proporciona hasta 50N de fuerza de agarre.
Related Collections







