







LINKERBOT Mano Robótica Linker Hand O6, 6 DoF, 11 articulaciones, CAN/RS485, agarre 130N, precisión ±0.2mm, DC24V±10%
LINKERBOT Mano Robótica Linker Hand O6, 6 DoF, 11 articulaciones, CAN/RS485, agarre 130N, precisión ±0.2mm, DC24V±10%
LINKERBOT
No se pudo cargar la disponibilidad de retiro
Resumen
LINKERBOT Linker Hand O6 es una mano robótica diseñada para una integración compacta y manipulación precisa. Proporciona 6 DoF con 11 articulaciones (6 activas + 5 pasivas), transmisión de engranaje de gusano para una actuación estable, control CAN/RS485 y detección táctil opcional. La estructura hábil ofrece hasta 130N de fuerza de agarre con cinco dedos y una precisión de posicionamiento repetido de ±0.2mm a un voltaje de operación de DC24V±10%. La construcción ligera de 370g y su pequeño tamaño apoyan el manejo logístico, el ensamblaje industrial y escenarios de agarre de formas irregulares.
Características Clave
Compacto &y Ágil
El diseño estructural compacto reduce la carga del equipo mientras mejora la flexibilidad para un agarre preciso en espacios reducidos.
Alta Durabilidad
Fabricado con aleación de aluminio para una resistencia ligera y a la abrasión, soportando un rendimiento estable a largo plazo.
Integración Dispositivo-Nube
La integración dispositivo-nube permite un despliegue rápido a través de una biblioteca de habilidades basada en la nube con operación y personalización simplificadas.
Especificaciones
| Modelo | LINKERBOT Linker Hand O6 |
| Grados de Libertad (DoF) | 6 |
| Número de Juntas | 11 (6 Activas + 5 Pasivas) |
| Método de Transmisión | Transmisión de Engranaje de Tornillo |
| Interfaz de Control | CAN/RS485 |
| Peso | 370g |
| Carga Máxima | 30kg |
| Tensión de Funcionamiento | DC24V±10% |
| Precisión de Reposición | ±0.2mm |
| Sensor Táctil | Opcional |
| Fuerza Máxima en la Punta del Pulgar | 28N |
| Fuerza Máxima de las Puntas de Cuatro Dedos | 33N |
| Fuerza de Agarre Máxima de Cinco Dedos | 130N |
| Dimensiones (Apariencia) | Altura 177mm; Ancho 76.5mm; Grosor 40mm |
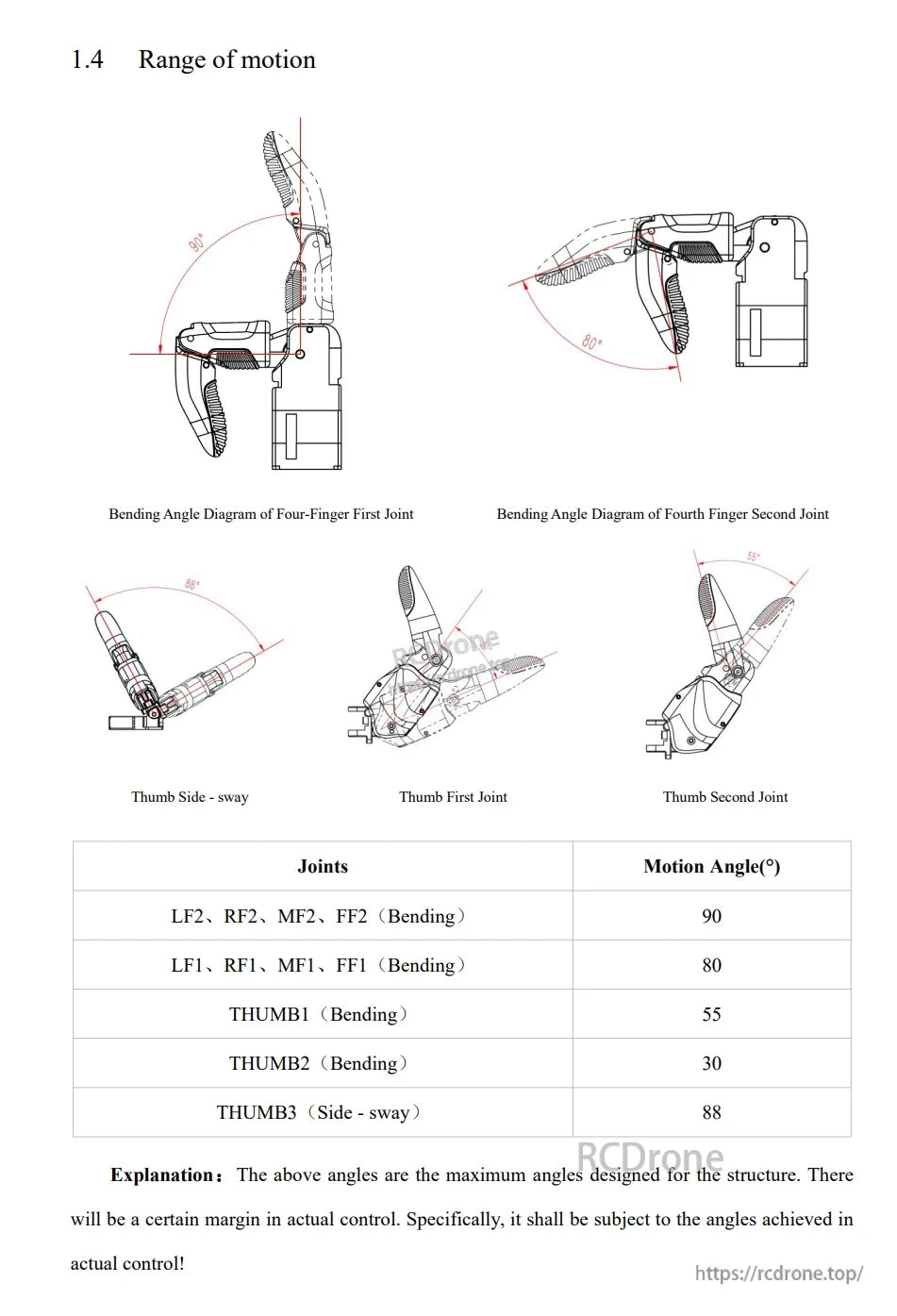
Rango de Movimiento
| LF2, RF2, MF2, FF2 (Flexión) | 90° |
| LF1, RF1, MF1, FF1 (Flexión) | 80° |
| DEDOS1 (Flexión) | 55° |
| DEDOS2 (Flexión) | 30° |
| DEDOS3 (Lateral - oscilación) | 88° |
Qué Incluye
- Cable de Depuración USB-a-CAN ×1
- Cable Conector XT30 (2+2) ×1
- Adaptador de Corriente ×1
- Cable de Corriente ×1
- Mano Linker O6 x1
Para ventas o soporte técnico, contacte [email protected] or visite https://rcdrone.top/.
Aplicaciones
- Manejo logístico y transferencia de material
- Ensamblaje industrial y manipulación de herramientas
- Agarre estable de formas irregulares y artículos de consumo
Manuales
Linker_Hand_O6_Product_Manual.pdf
Detalles

Linker Hand O6 ofrece 6 articulaciones activas y 5 pasivas para un agarre preciso y fuerte. Su diseño compacto y duradero de aluminio es adecuado para logística, ensamblaje y agarre irregular. Cuenta con integración en la nube para un fácil entrenamiento de IA sin necesidad de codificación.


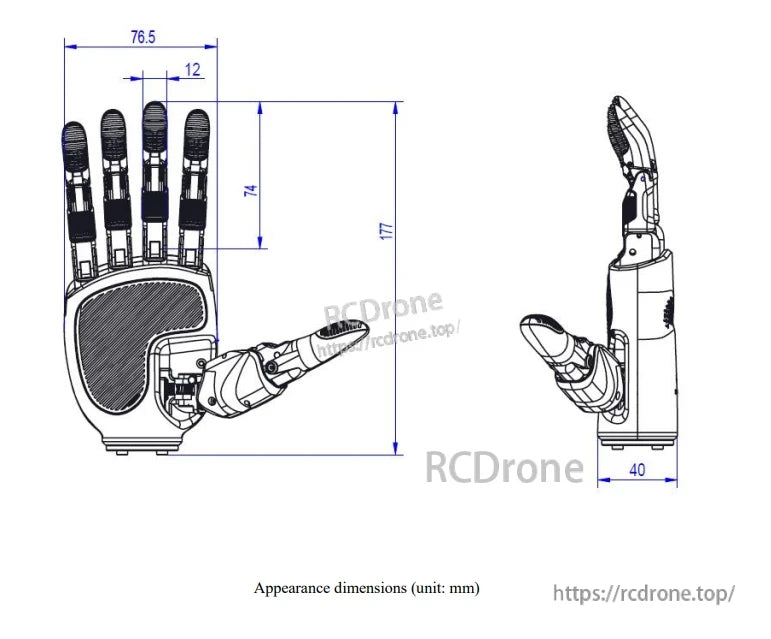
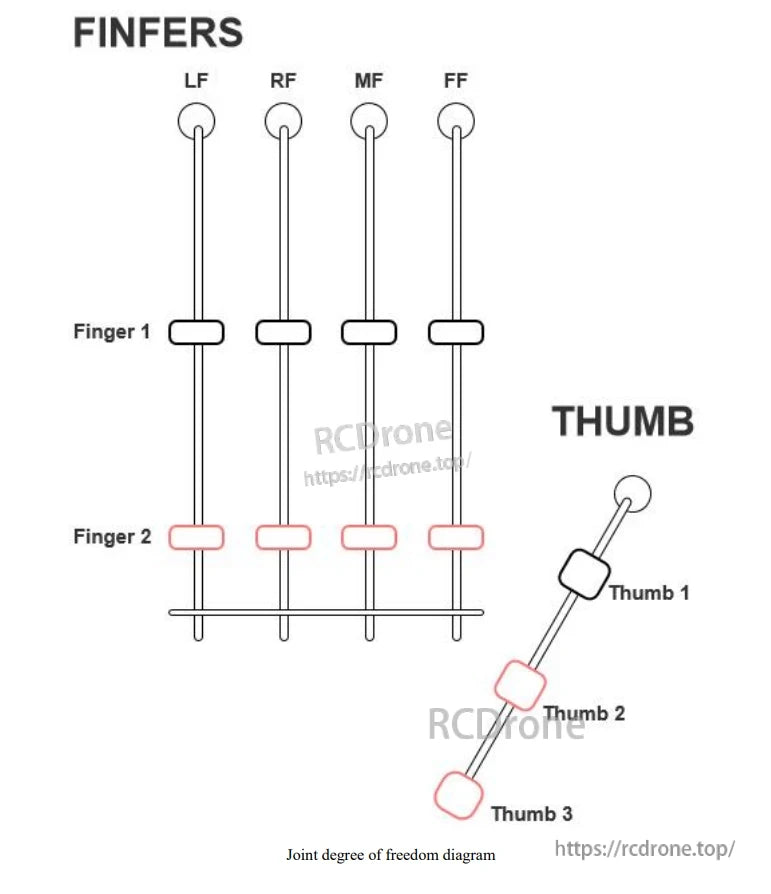
Diagrama de grados de libertad de las articulaciones de los dedos y el pulgar
Los dedos se doblan 80–90°, el pulgar se dobla 30–55°, y el movimiento lateral alcanza 88°. Estos son los ángulos máximos diseñados; el control real puede variar ligeramente.
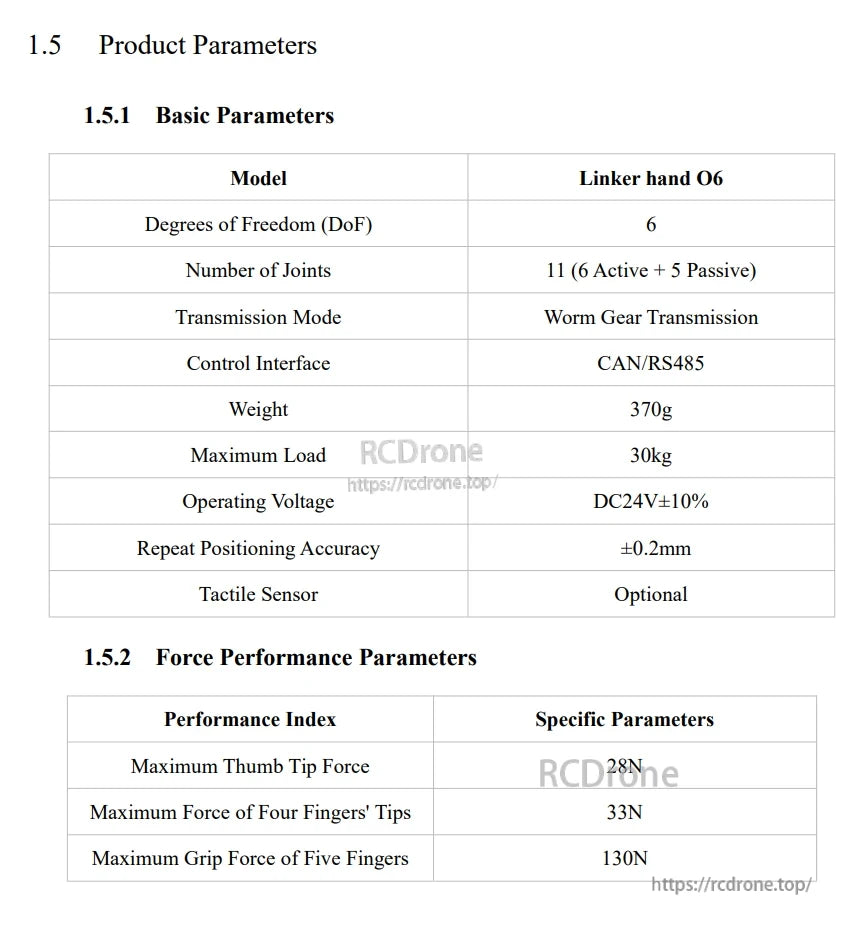
La mano robótica Linker Hand O6 tiene 6 DoF, 11 articulaciones, transmisión de engranaje de gusano, control CAN/RS485, pesa 370g, maneja una carga máxima de 30kg, opera a DC24V±10%, con una precisión de ±0.2mm, y ofrece sensores táctiles opcionales con rendimiento de fuerza especificado.

Lista de accesorios para la instalación de la mano hábil: cable USB-a-CAN, conector XT30, adaptador de corriente y cable de alimentación—todas las cantidades son una.
Related Collections







