



Motor LKMTECH MF12025-V2 24V 60W 10N.m con unidad integrada, codificador magnético de 18 bits, CAN/RS485
Motor LKMTECH MF12025-V2 24V 60W 10N.m con unidad integrada, codificador magnético de 18 bits, CAN/RS485
LKMTECH
No se pudo cargar la disponibilidad de retiro
Descripción
LKMTECH El motor MF12025-V2 es un motor integrado con controlador y encoder incorporados para sistemas de actuación robótica que requieren alta precisión de control y alto par de salida. Soporta comunicación CAN o RS485 y puede alternar entre modo de par, modo de velocidad y modo de posición.
Características clave
- Diseño integrado (integración mecánico-eléctrica)
- Diseño ligero (diseño aplanado de aleaciones de aluminio aeroespacial)
- Salida de alto par (imán permanente RbFeB de alto rendimiento)
- Modos de control: modo de par, modo de velocidad y modo de posición
- Comunicación: CAN o RS485; soporta una variedad de tasas de baudios
- Soporta entrada PWM
- Monitoreo en tiempo real de la temperatura del estator
- Control principal: procesador ARM Cortex-M4 de 32 bits de alta eficiencia
- El controlador utiliza un circuito de puente completo con baja resistencia interna y alta corriente
- Encoder magnético absoluto de un solo giro de 18 bits; una calibración, posición cero nunca se pierde
- Equipo técnico profesional; soporte a medida
- Notas de construcción del motor: rotor externo; diseño de arco multi-etapa con imán permanente; menor espacio de aire; magnetización radial; 0.2mm hoja de acero silicio; Alambre esmaltado aislado clase H; NdFeB grado SH; servicio OEM/ODM
- Software del programa proporcionado para ajustar parámetros, probar y actualizar; soporta desarrollo de código abierto como PC, MCU, PLC, ICP y RPi
Especificaciones
| Nombre del artículo | MF12025v2 |
| Vueltas | 20 |
| Tensión nominal | 24V |
| Velocidad máxima | 250RPM |
| Par nominal | 5N.m |
| Velocidad nominal | 115RPM |
| Corriente nominal | 4A |
| Poder máximo | 60W |
| Par máximo | 10N.m |
| Constante de velocidad | 4.8rpm/V |
| Constante de par | 1.25N.m/A |
| Tipo de bobinado | Y |
| Resistencia de fase | 2.4Ω |
| Inductancia de fase | 5mH |
| Polos del motor | 42 |
| Inercia del rotor | 5500gcm² |
| Temperatura del motor | SÍ |
| Carga nominal del rodamiento | 1560N |
| Peso del motor | 1147g |
| Recomendación de controlador | DF70v2 |
| Tensión de entrada del controlador | 7.4-32V |
| Comunicación | RS485 O CAN |
| Frecuencia de Comunicación | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | Encoder Magnético de 18 bits |
| Baudrate del Encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M |
| Modo de Control | Bucle de Torque (24KHz)/Bucle de Velocidad (8KHz)/Bucle de Posición (8KHz) |
| Curva de Aceleración | Aceleración Trapezoidal |
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos
- Vehículos AGV
- Robots ARU
- Cámara PTZ
- Laser LiDAR
- Robot de inspección de estaciones de energía
- Inspección industrial
Para verificaciones de compatibilidad previas a la venta y soporte de integración, contacte [email protected] or visite https://rcdrone.top/.
Manuales
Detalles

Un actuador integrado motor para robótica que combina el accionamiento y el encoder y soporta tanto comunicación CAN como RS485.
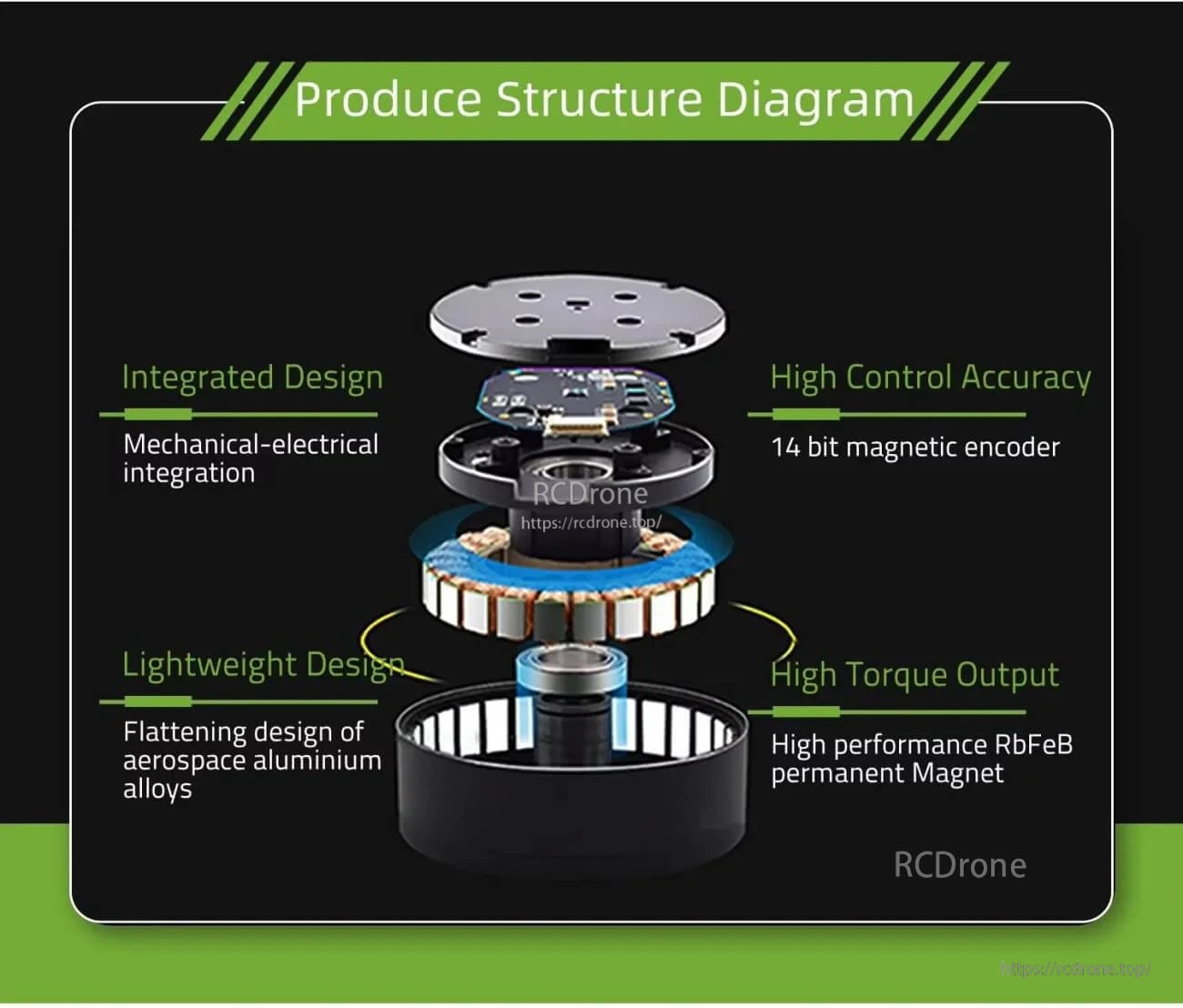
El diseño mecánico-eléctrico integrado ayuda a mantener el actuador compacto mientras mantiene una alta precisión de control y salida de par.
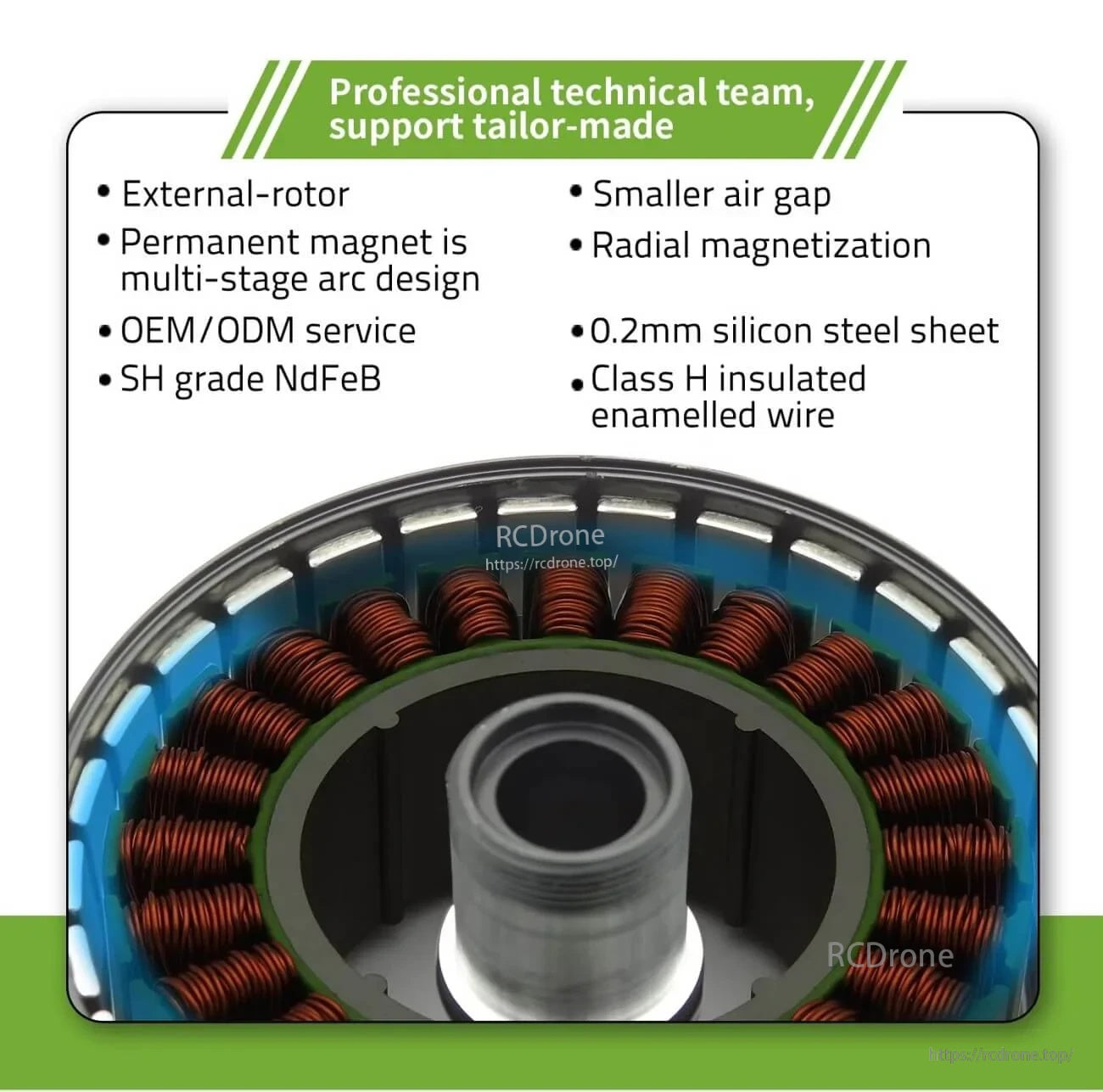
La construcción de rotor externo y los detalles de diseño de imán permanente apoyan la entrega suave de torque para juntas de precisión y módulos de movimiento.
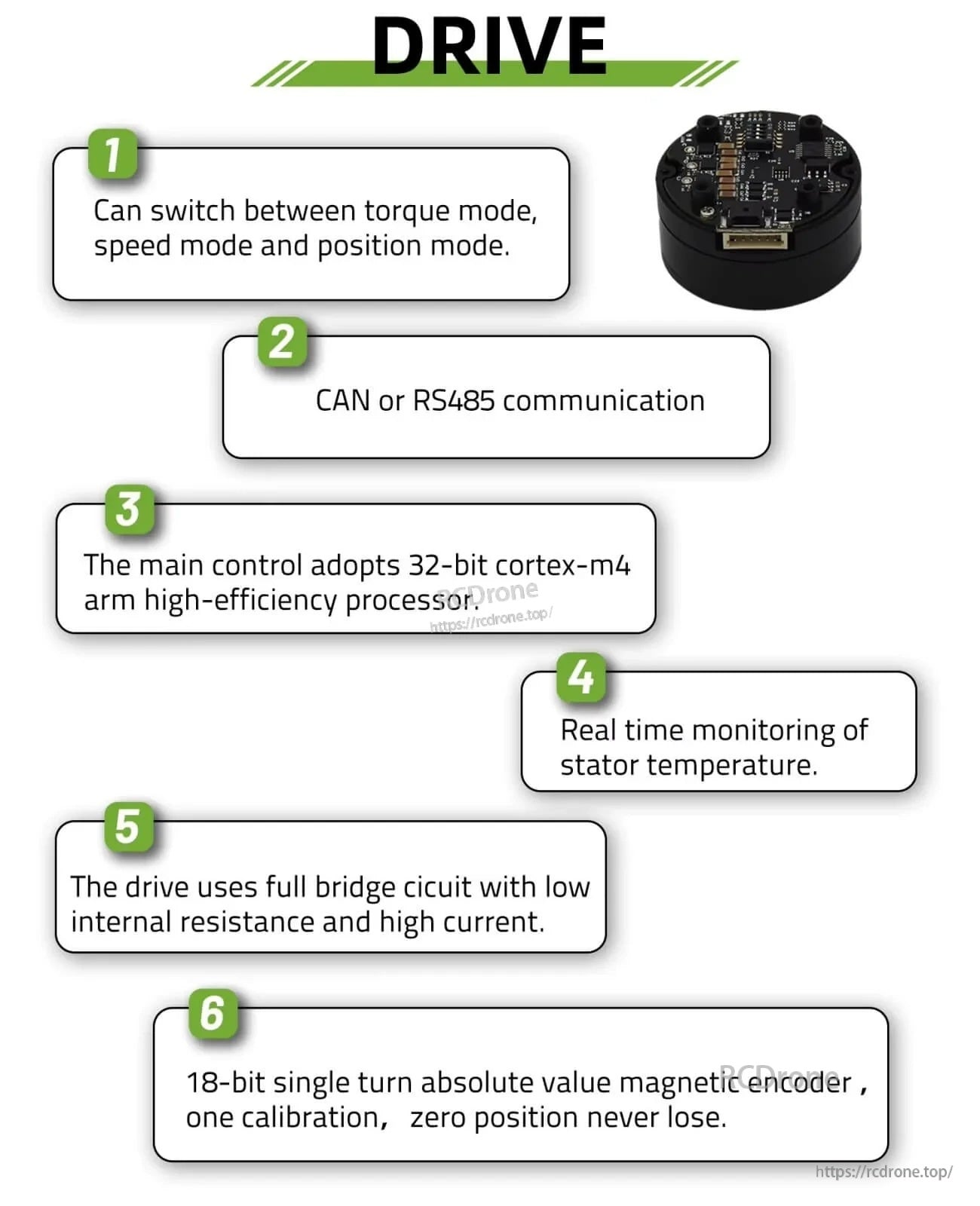
Se admiten modos de torque, velocidad y posición, con monitoreo de temperatura incorporado y opciones de conectividad flexibles CAN/RS485.
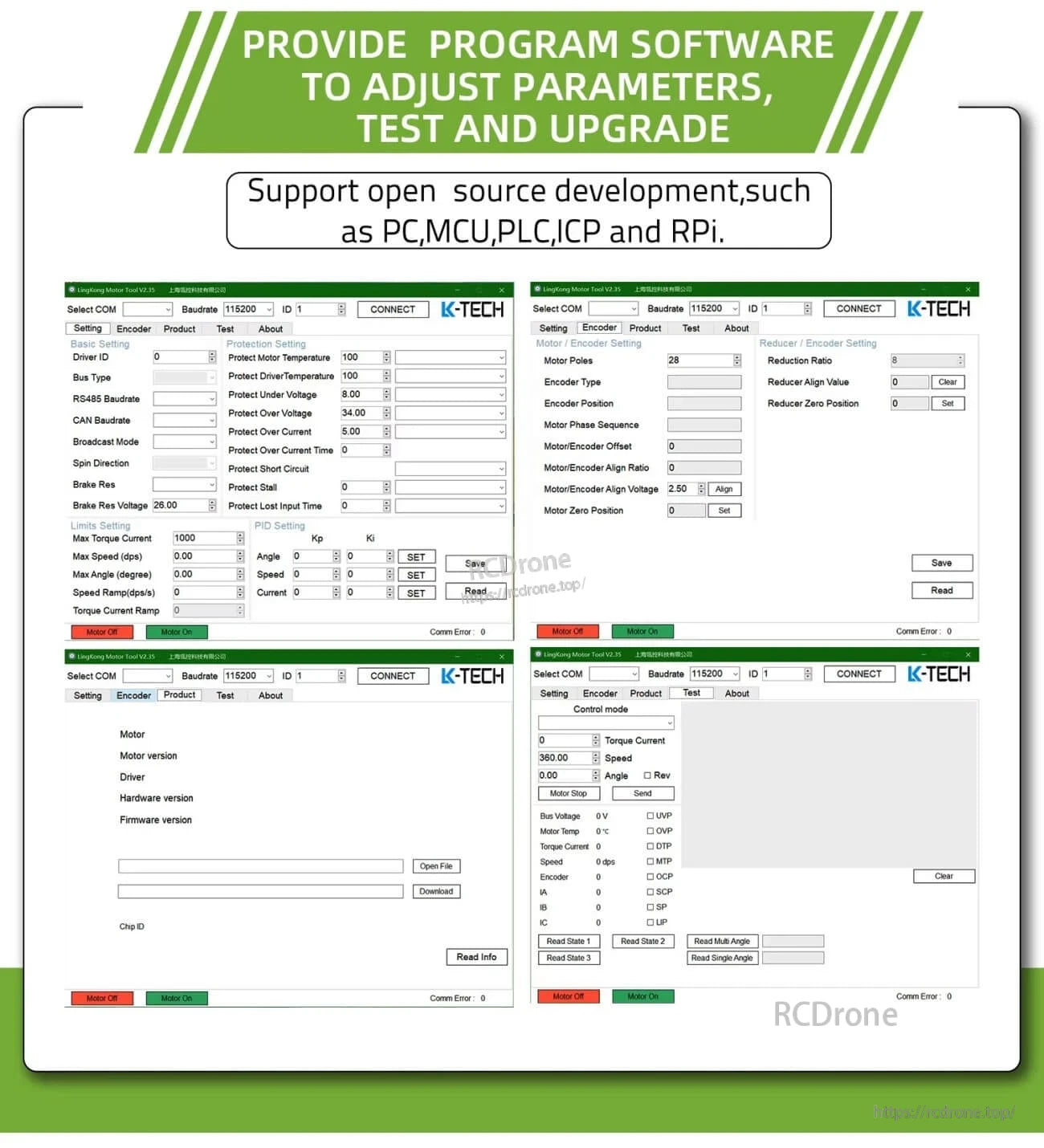
Se proporciona software para PC para la configuración de parámetros, pruebas y actualizaciones, apoyando plataformas de desarrollo y controladores comunes.

Related Collections



