



Motor LKMTECH MF4005-V2 12V RS485/CAN Codificador Magnético 18bit Opción de Controlador DF40V2 para Robótica
Motor LKMTECH MF4005-V2 12V RS485/CAN Codificador Magnético 18bit Opción de Controlador DF40V2 para Robótica
LKMTECH
No se pudo cargar la disponibilidad de retiro
Descripción
LKMTECH MF4005-V2 es un motor diseñado para aplicaciones mecatrónicas integradas que requieren un diseño ligero, alta precisión de control y alta salida de par. La actualización del MF4005 V2 destaca: resolución del encoder mejorada de 14 bits a 18 bits, optimización del par de arrastre, soporte de entrada PWM y comunicación CAN/RS485 con múltiples opciones de velocidad en baudios.
Características clave
- Diseño integrado: integración mecánico-eléctrica
- Diseño ligero: diseño aplanado de aleaciones de aluminio aeroespacial
- Alta precisión de control: encoder magnético (la actualización MF4005 V2 indica 14 bits mejorados a 18 bits)
- Alta salida de par: imán permanente de alto rendimiento RbFeB
- Soporta entrada PWM
- Comunicación: CAN o RS485
- Funciones de conducción: puede cambiar entre modo de par, modo de velocidad y modo de posición
- Control principal: procesador ARM Cortex-M4 de 32 bits de alta eficiencia (conducción)
- Monitoreo en tiempo real de la temperatura del estator (conducción)
- Etapa de potencia de conducción: circuito de puente completo con baja resistencia interna y alta corriente
- Encoder magnético absoluto de un solo giro de 18 bits (texto de función de conducción); una calibración, posición cero nunca se pierde
- Notas de construcción del motor: rotor externo; diseño de arco de múltiples etapas con imán permanente; menor espacio de aire; magnetización radial; 0.2 mm hoja de acero silicio; alambre esmaltado aislado clase H; imán NdFeB grado SH
- servicio OEM/ODM (no una especificación del producto)
- Software de parámetros: software del programa proporcionado para ajustar parámetros, probar y actualizar; soporta desarrollo de código abierto como PC, MCU, PLC, ICP y RPi
Escenarios de Aplicación
- Robots Humanoides
- Brazos Robóticos
- Exoesqueletos
- Robots Cuadrúpedos
- Vehículos AGV
- Robots ARU
- Cámara PTZ
- Lidar Láser
- Robot de Inspección de Estaciones de Energía
- Inspección Industrial
Especificaciones
Modelo de motor: MF4005-V2
| Parámetro | Valor (25 vueltas) | Valor (40 vueltas) |
|---|---|---|
| Nombre del Artículo | MF4005-V2 | MF4005-V2 |
| Vueltas | 25 | 40 |
| Tensión nominal | 12V | 12V |
| Velocidad máxima | 2390RPM | 1300RPM |
| Par nominal | 0.07 N.m | 0.06 N.m |
| Velocidad nominal | 1600RPM | 700RPM |
| Corriente nominal | 1.44A | 0.81A |
| Potencia máxima | 14W | 4.6W |
| Par máximo | 0.25 N.m | 0.12 N.m |
| Constante de velocidad | 133 rpm/V | 58 rpm/V |
| Constante de par | 0.05 N.m/A | 0.07 N.m/A |
| Tipo de bobinado | Y | Y |
| Resistencia de fase | 1.9Ω | 4.3Ω |
| Inductancia de fase | 0.5mH | 1.2mH |
| Polos del motor | 26 | 26 |
| Inercia del rotor | 56 gcm² | 56 gcm² |
| Temperatura del motor | SÍ | SÍ |
| Carga nominal del rodamiento | 140N | 140N |
| Peso del motor | 65g | 65g |
| Recomendar controlador | DF40V2 | DF40V2 |
| Tensión de entrada del controlador | 7.4-32V | 7.4-32V |
| Comunicación | RS485 O CAN | RS485 O CAN |
| Frecuencia de Comunicación | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| Encoder | Encoder Magnético de 18 bits | Encoder Magnético de 18 bits |
| Tasa de Baud del Encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Tasa de Baud (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Modo de Control | Bucle de Torque (24KHz) / Bucle de Velocidad (8KHz) / Bucle de Posición (8KHz) | Bucle de Torque (24KHz) / Bucle de Velocidad (8KHz) / Bucle de Posición (8KHz) |
| Curva de Aceleración | Aceleración trapezoidal | Aceleración trapezoidal |
Definición de interfaz
Interruptor de ID: INTERRUPTOR DE ID
| Interfaz | Nota |
|---|---|
| A/L | RS485-A o CAN-L |
| B/H | RS485-B o CAN-H |
| V+ | Fuente de alimentación positiva |
| V+ | Fuente de alimentación positiva |
| V- | Fuente de alimentación negativa |
| V- | Fuente de alimentación negativa |
| T | Transmisor UART |
| R | Receptor UART |
| G | GND de señal |
Para soporte de preventa o integración (configuración RS485/CAN, selección de velocidad en baudios y archivos CAD), contacte [email protected] or visite https://rcdrone.top/.
Manuales / Archivos
Detalles

MF4005‑V2 integra características de motor, codificador y controlador para construcciones robóticas compactas, con un codificador magnético de 18 bits mejorado y opciones de comunicación CAN/RS485.
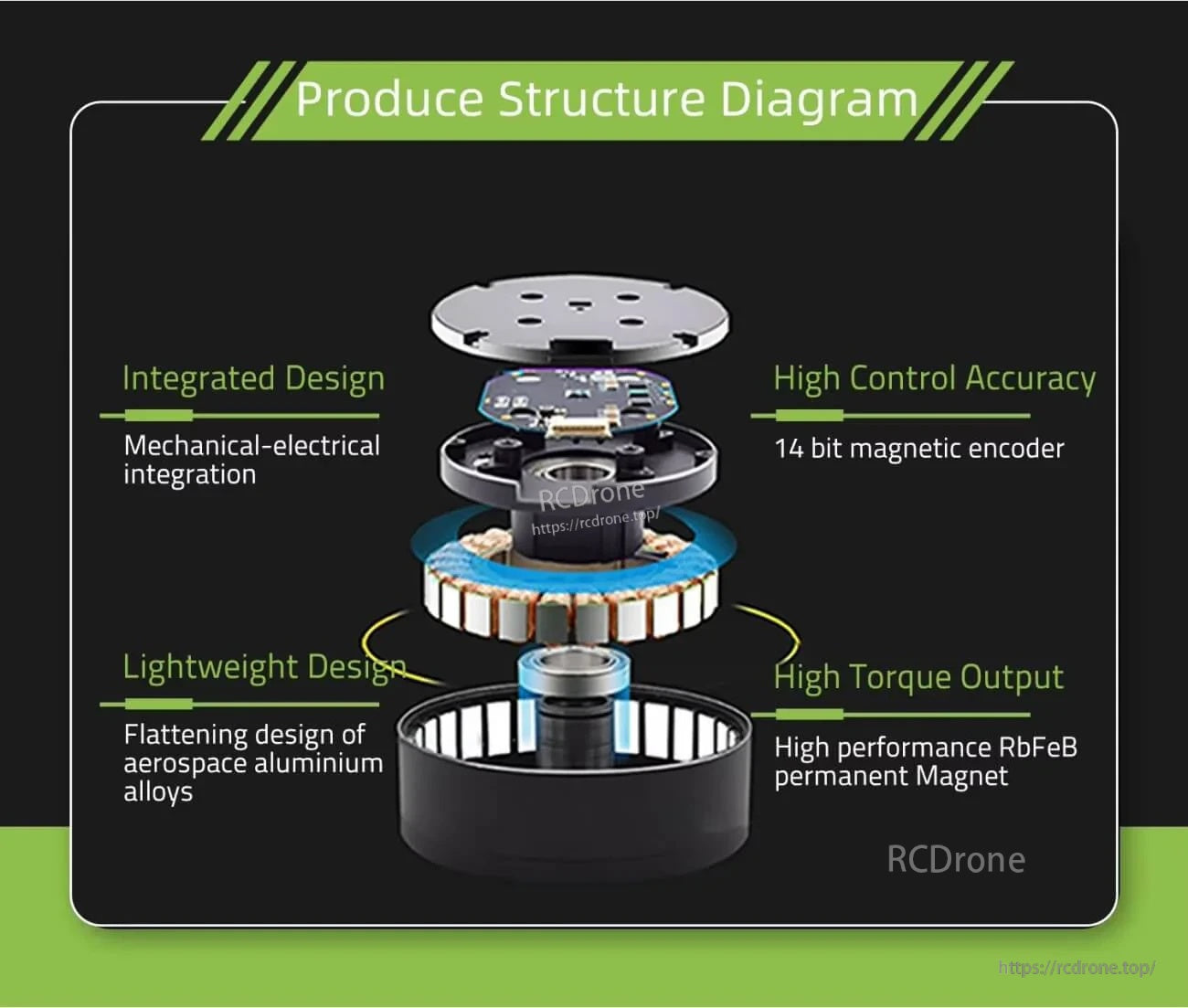
Una construcción integrada y ligera combina la electrónica de control con el ensamblaje del motor para soportar un control preciso y una alta salida de torque.
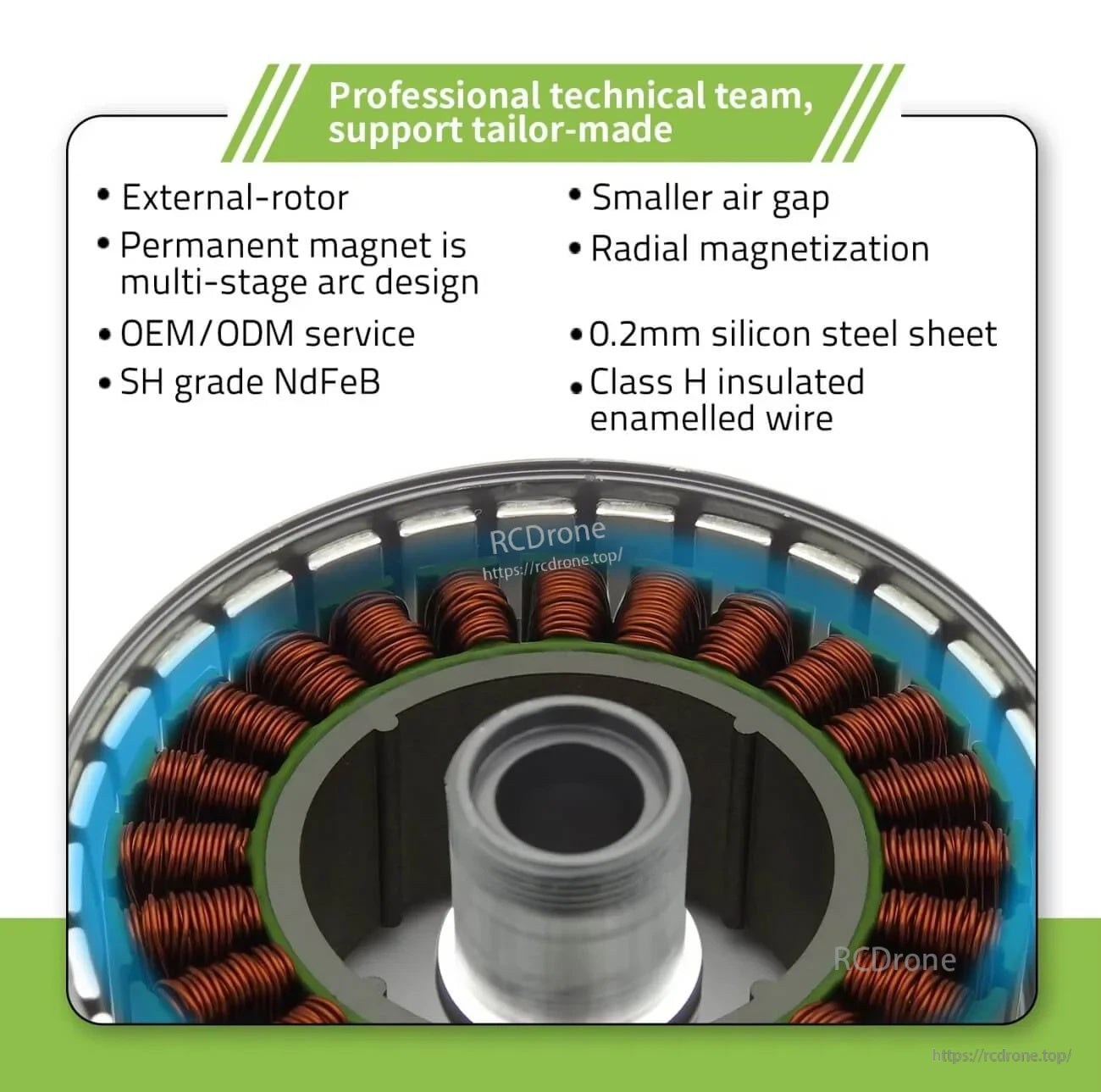
El diseño de rotor externo y la disposición densa del bobinado ayudan a equilibrar el tamaño, la capacidad de respuesta y el torque para juntas y actuadores robóticos.
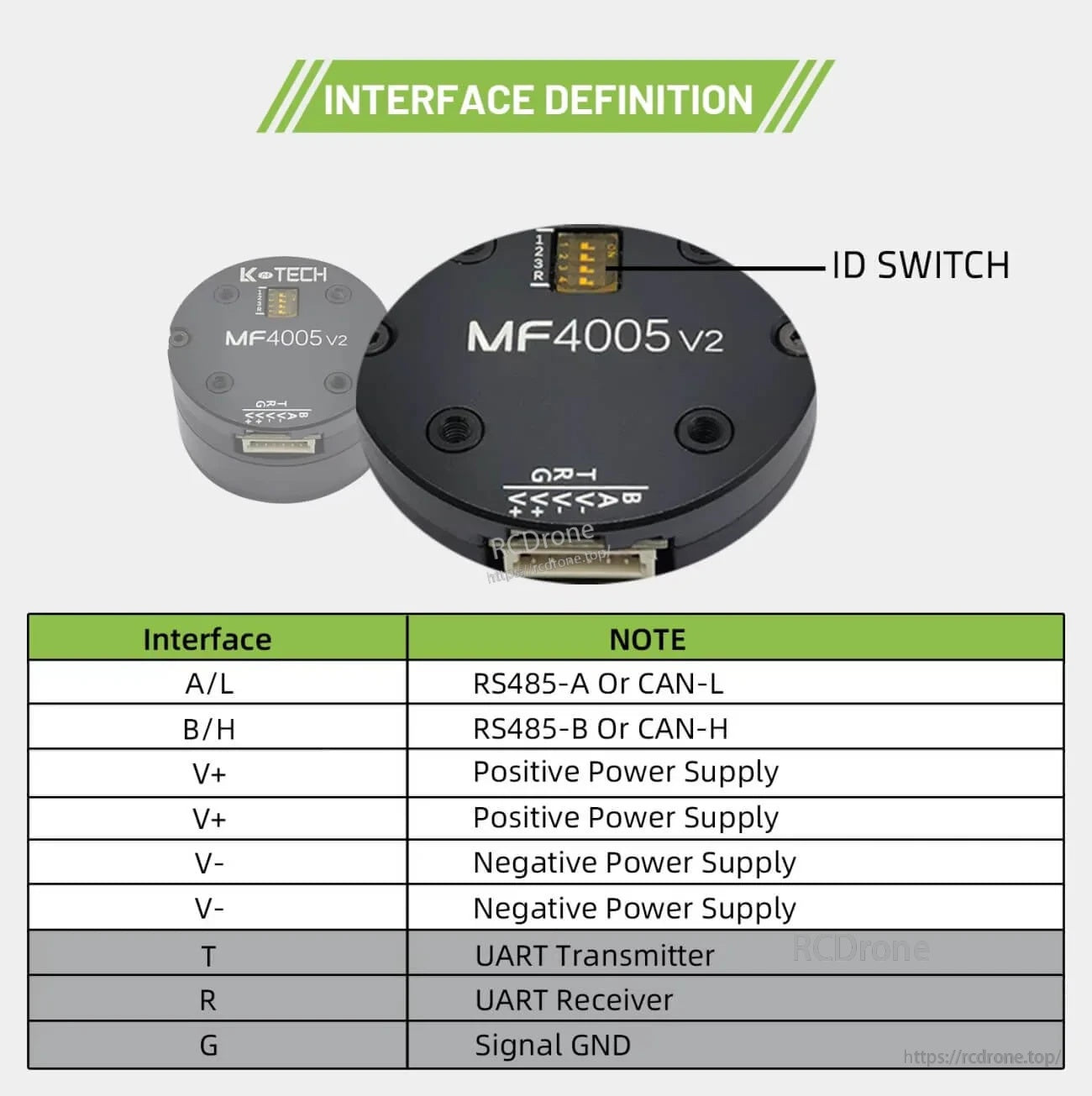
El cableado se simplifica con un conector claramente etiquetado y un interruptor de ID para configuraciones de bus que utilizan RS485 o CAN.
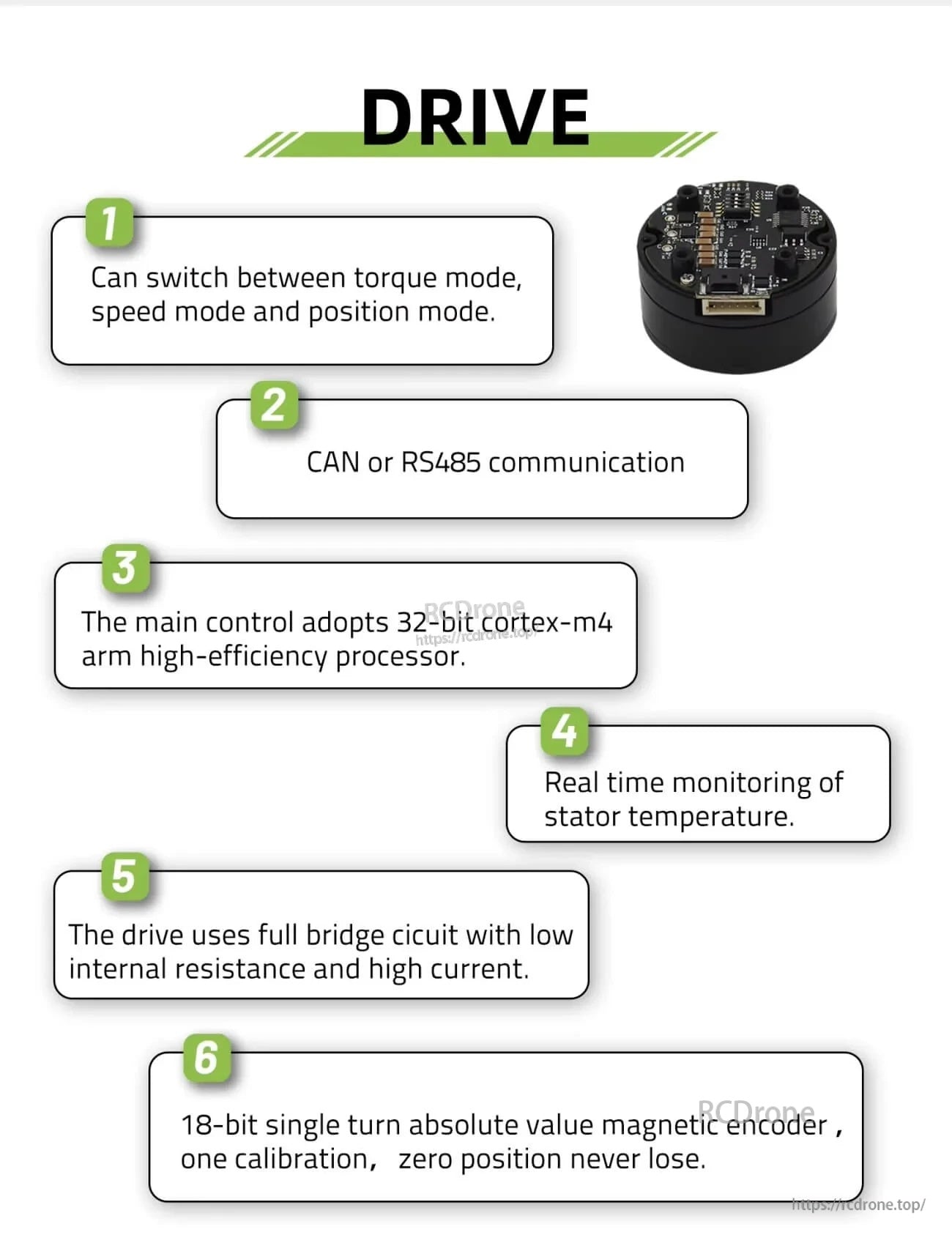
Las capacidades de control incluyen modos de torque, velocidad y posición seleccionables, además de monitoreo de temperatura del estator en tiempo real a través de CAN o RS485.
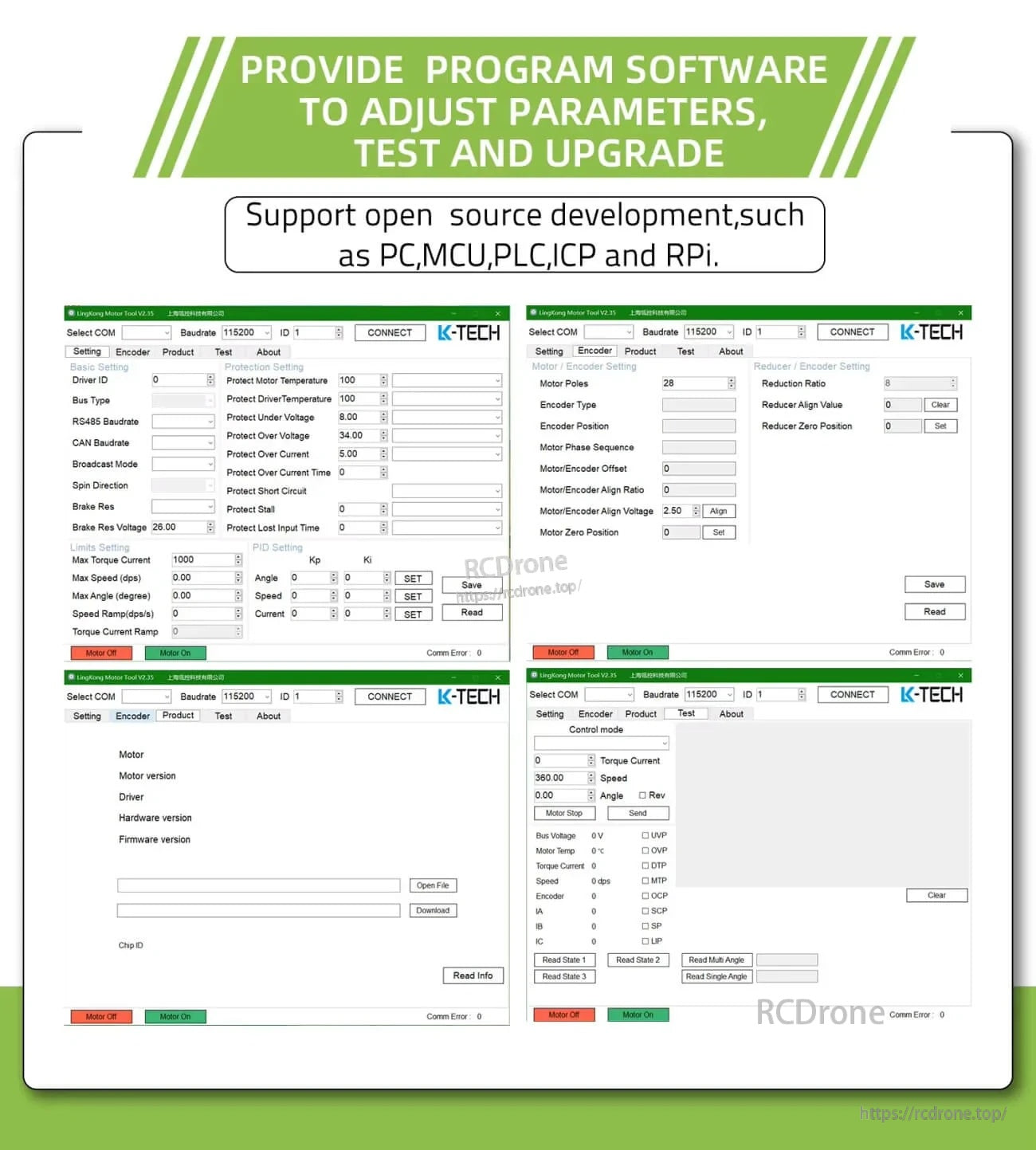
El soporte de software para PC ayuda con la configuración de parámetros, pruebas y actualizaciones, con opciones adecuadas para flujos de trabajo de desarrollo.
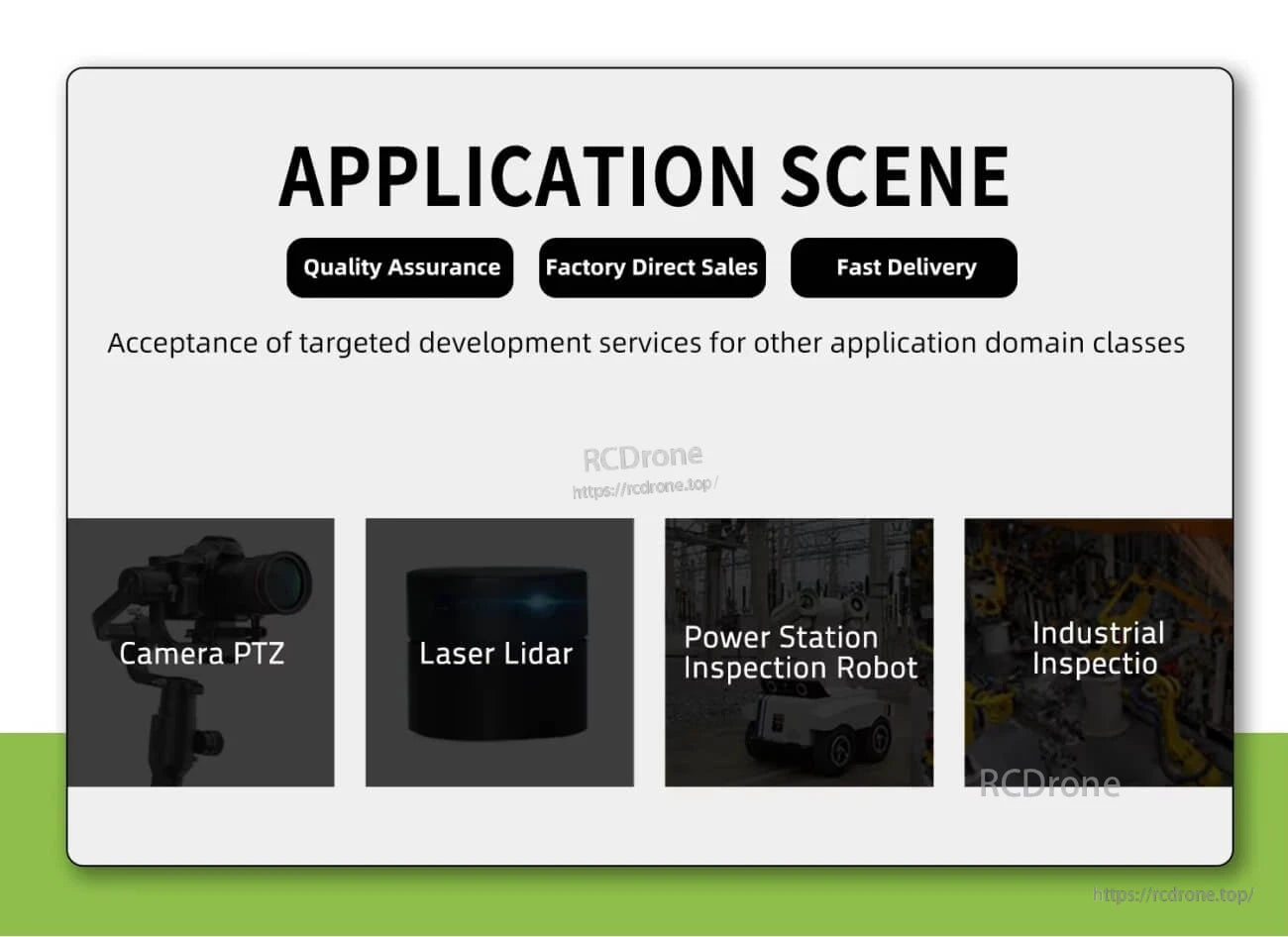
Las áreas de aplicación comunes incluyen cabezales de cámara PTZ, sistemas lidar y robots de inspección utilizados en entornos industriales.
Related Collections



