



Motor LKMTECH MF5010-V2 16V 10T/35T, RS485/CAN, Codificador Magnético de 18 bits para Robots & AGV
Motor LKMTECH MF5010-V2 16V 10T/35T, RS485/CAN, Codificador Magnético de 18 bits para Robots & AGV
LKMTECH
Precio habitual
$131.00 USD
Precio habitual
Precio de oferta
$131.00 USD
Precio unitario
por
Impuestos incluidos.
Los gastos de envío se calculan en la pantalla de pago.
No se pudo cargar la disponibilidad de retiro
Descripción
Características Clave
- Diseño integrado (integración mecánico-eléctrica)
- Diseño ligero
- Alta precisión de control
- Alta salida de par
- Imán permanente RbFeB de alto rendimiento
- Encoder magnético de 18 bits
- Comunicación: RS485 o CAN
- Soporta entrada PWM
- Aceleración trapezoidal
Escenarios de Aplicación
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos
- Vehículos AGV
- Robots ARU
- Cámara PTZ
- Lidar láser
- Robot de inspección de estaciones de energía
- Inspección industrial
Especificaciones
| Parámetro | MF5010-V2 (10T) | MF5010-V2 (35T) |
|---|---|---|
| Nombre del Artículo | MF5010-V2 | MF5010-V2 |
| Gira | 10 | 35 |
| Tensión nominal | 16V | 16V |
| Velocidad máxima | 3050RPM | 870RPM |
| Par nominal | 0.26N.m | 0.24N.m |
| Velocidad nominal | 2400RPM | 440RPM |
| Corriente nominal | 5.06A | 1.35A |
| Potencia máxima | 128W | 12W |
| Par máximo | 0.4N.m | 0.53N.m |
| Constante de velocidad | 150rpm/V | 27.5rpm/V |
| Constante de par | 0.05N.m/A | 0.18N.m/A |
| Tipo de bobinado | Y | Y |
| Resistencia de fase | 0.33Ω | 3.2Ω |
| Inductancia de fase | 0.13mH | 1.2mH |
| Polos del motor | 28 | 28 |
| Inercia del rotor | 202gcm² | 202gcm² |
| Temperatura del motor | SÍ | SÍ |
| Carga nominal del rodamiento | 153N | 153N |
| Peso del motor | 137g | 137g |
| Recomendar controlador | DF40V2 | DF40V2 |
| Tensión de entrada del controlador | 7.4-32V | 7.4-32V |
| Comunicación | RS485 O CAN | RS485 O CAN |
| Frecuencia de Comunicación | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | Encoder Magnético de 18 bits | Encoder Magnético de 18 bits |
| Tasa de Baud del Encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Tasa de Baud (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Modo de Control | Bucle de Torque(24KHz)/Bucle de Velocidad(8KHz)/Bucle de Posición(8KHz) | Bucle de Torque(24KHz)/Bucle de Velocidad(8KHz)/Bucle de Posición(8KHz) |
| Curva de Aceleración | Aceleración Trapezoidal | Aceleración trapezoidal |
Dibujo de instalación (Dimensiones clave)
- Marcas de diámetro: Ø44.4, Ø44, Ø25
- Marcado del eje/bore: Ø12.7H7 profundidad 16.5
- Marcado del diámetro del cuerpo: Ø49 (-0.10), Ø49 (-0.05)
- Marcados de longitud: 28.9 ±0.10, 17.5
- Orificios de montaje: 4-M2.5 profundidad 8; 6-M2.5 profundidad 3; 4-M3 profundidad 3.5
- Marcado de longitud adicional: 20
Manuales / Documentos
Para asistencia con cableado, integración y pedidos (incluida la selección de controlador DF40V2 y configuración RS485/CAN), contacte [email protected] or visite https://rcdrone.top/.
Detalles

Construido para juntas robóticas compactas, el MF5010 V2 combina un diseño de motor integrado con comunicación RS485/CAN y un codificador mejorado.
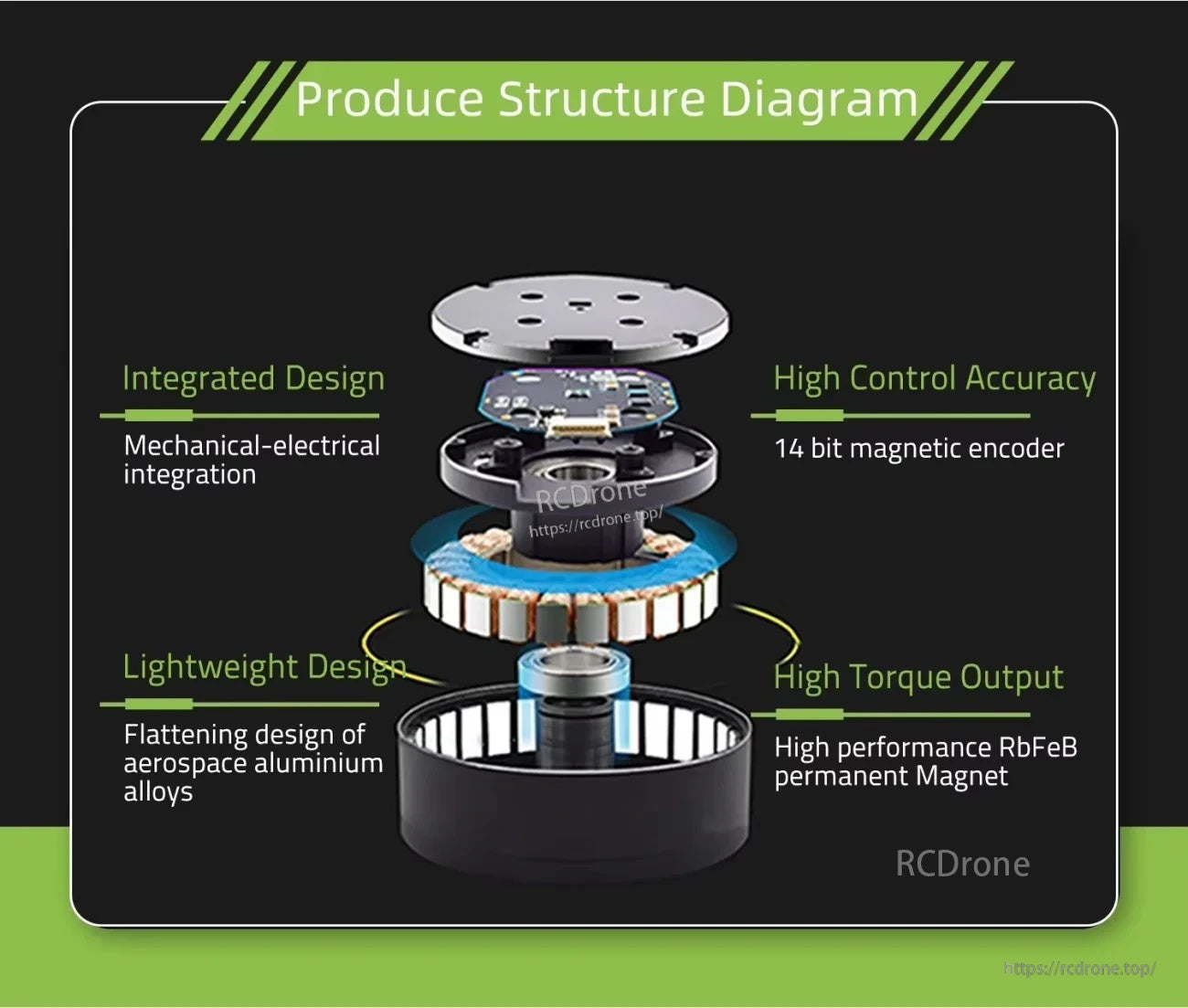
Una estructura mecánico-eléctrica integrada ayuda a mantener el peso bajo mientras soporta un control preciso y una salida de par.
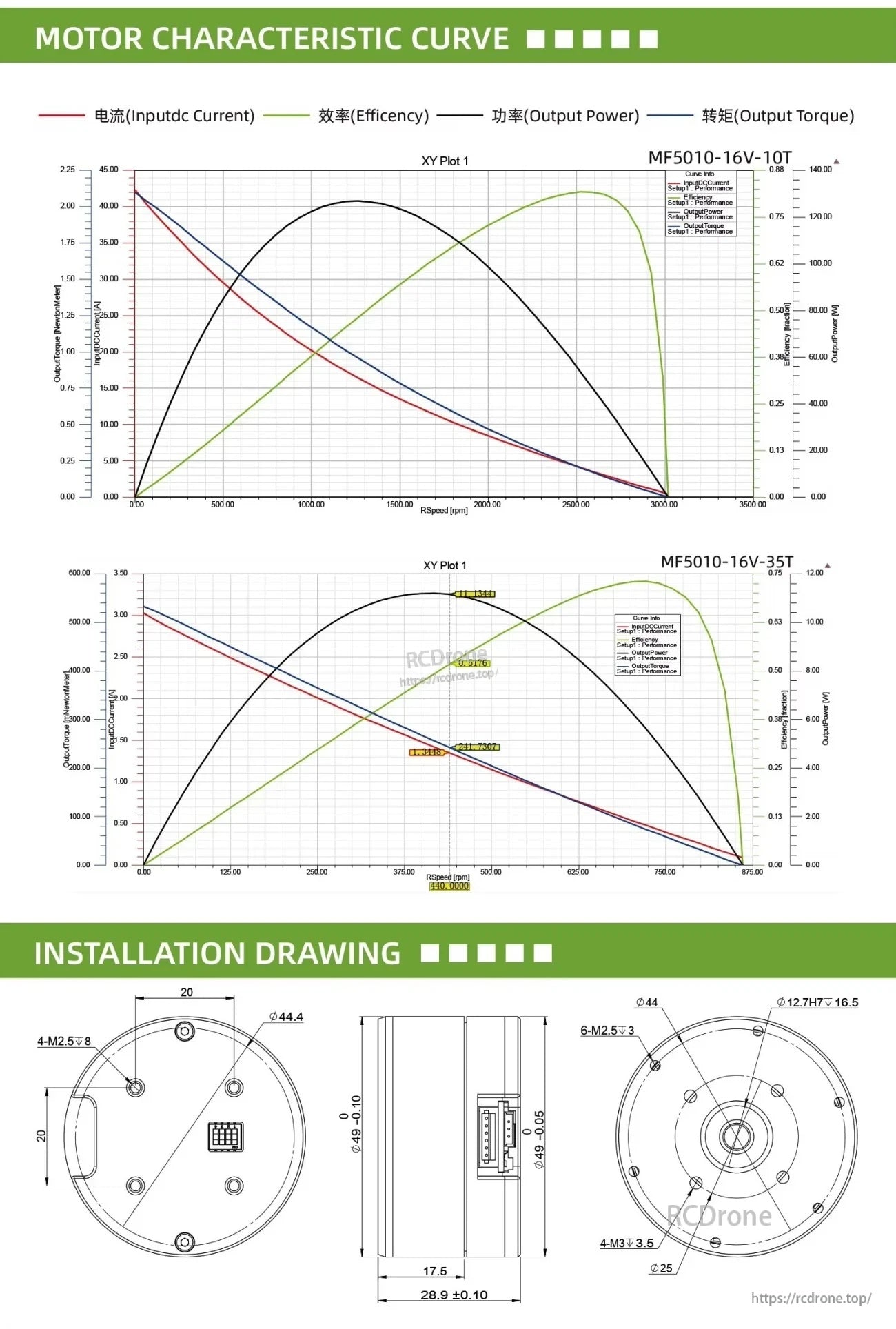
Las curvas de referencia y el dibujo de instalación ayudan a combinar la opción de bobinado de 10T o 35T con sus necesidades de velocidad/par y disposición de montaje.

Related Collections



