



Motor LKMTECH MF7010-V2 24V (23T/45T) RS485/CAN Codificador 18 bits, Controlador DF70V2 para Robots
Motor LKMTECH MF7010-V2 24V (23T/45T) RS485/CAN Codificador 18 bits, Controlador DF70V2 para Robots
LKMTECH
No se pudo cargar la disponibilidad de retiro
Resumen
El LKMTECH MF7010-V2 Motor es un motor para robótica y juntas de automatización, que ofrece comunicación RS485 o CAN (con el controlador DF70V2 recomendado) y un encoder magnético integrado. Se especifica en dos opciones de bobinado (23 vueltas / 45 vueltas), ambas con una clasificación de 24V, con soporte de temperatura del motor y un encoder magnético de 18 bits.
Características Clave
- Diseño integrado con integración mecánico-eléctrica
- Alta precisión de control (el encoder magnético de 14 bits se menciona en el material de características)
- Salida de alto par con imán permanente RbFeB de alto rendimiento (redacción del material de características)
- Diseño ligero con diseño aplanado de aleaciones de aluminio aeroespacial (redacción del material de características)
- Diseño de rotor externo
- Diseño de arco multi-etapa con imán permanente
- Menor espacio de aire; magnetización radial
- 0.2 mm hoja de acero silicio
- Alambre esmaltado aislado clase H
- Grado SH NdFeB (redacción del material característico)
- Software del programa proporcionado para ajustar parámetros, probar y actualizar; soporta desarrollo de código abierto como PC, MCU, PLC, ICP y RPi
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos
- Vehículos AGV
- Robots ARU
- Cámara PTZ
- Sistemas de láser LiDAR
- Robots de inspección de estaciones de energía
- Equipo de inspección industrial
Especificaciones
| Parámetro | MF7010-V2 (23 vueltas) | MF7010-V2 (45 vueltas) |
|---|---|---|
| Nombre del artículo | MF7010-V2 | MF7010-V2 |
| Vueltas | 23 | 45 |
| Voltaje nominal | 24V | 24V |
| Velocidad máxima | 1230 RPM | 620 RPM |
| Par nominal | 0.61 N.m | 0.63 N.m |
| Velocidad nominal | 940 RPM | 400 RPM |
| Corriente nominal | 3.3 A | 1.75 A |
| Poder máximo | 104 W | 31 W |
| Par máximo | 2 N.m | 2.1 N.m |
| Constante de velocidad | 39 rpm/V | 16.7 rpm/V |
| Constante de par | 0.18 N.m/A | 0.36 N.m/A |
| Tipo de bobinado | Y | Y |
| Resistencia de fase | 0.71 ohm | 2.73 ohm |
| Inductancia de fase | 0.86 mH | 3.3 mH |
| Polos del motor | 28 | 28 |
| Inercia del rotor | 748 gcm^2 | 748 gcm^2 |
| Temperatura del motor | SÍ | SÍ |
| Carga nominal del rodamiento | 330 N | 330 N |
| Peso del motor | 278 g | 278 g |
| Recomendar controlador | DF70V2 | DF70V2 |
| Tensión de entrada del controlador | 7.4-32V | 7.4-32V |
| Comunicación | RS485 o CAN | RS485 o CAN |
| Frecuencia de Comunicación | RS485: 500 Hz (115200 bps) / CAN: 2 kHz (1 Mbps) | RS485: 500 Hz (115200 bps) / CAN: 2 kHz (1 Mbps) |
| Encoder | Encoder magnético de 18 bits | Encoder magnético de 18 bits |
| Tasa de Baud del Encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1 Mbps, 2 Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1 Mbps, 2 Mbps |
| Tasa de Baud (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Modo de Control | Bucle de par (24 kHz) / Bucle de velocidad (8 kHz) / Bucle de posición (8 kHz) | Bucle de par (24 kHz) / Bucle de velocidad (8 kHz) / Bucle de posición (8 kHz) |
| Curva de Aceleración | Aceleración trapezoidal | Aceleración trapezoidal |
Manuales
Para preguntas de compatibilidad de pre-venta (selección de controlador, configuración de RS485/CAN, configuración de baudrate) o ayuda con la documentación, contacta [email protected] or visita https://rcdrone.top/ .
Detalles
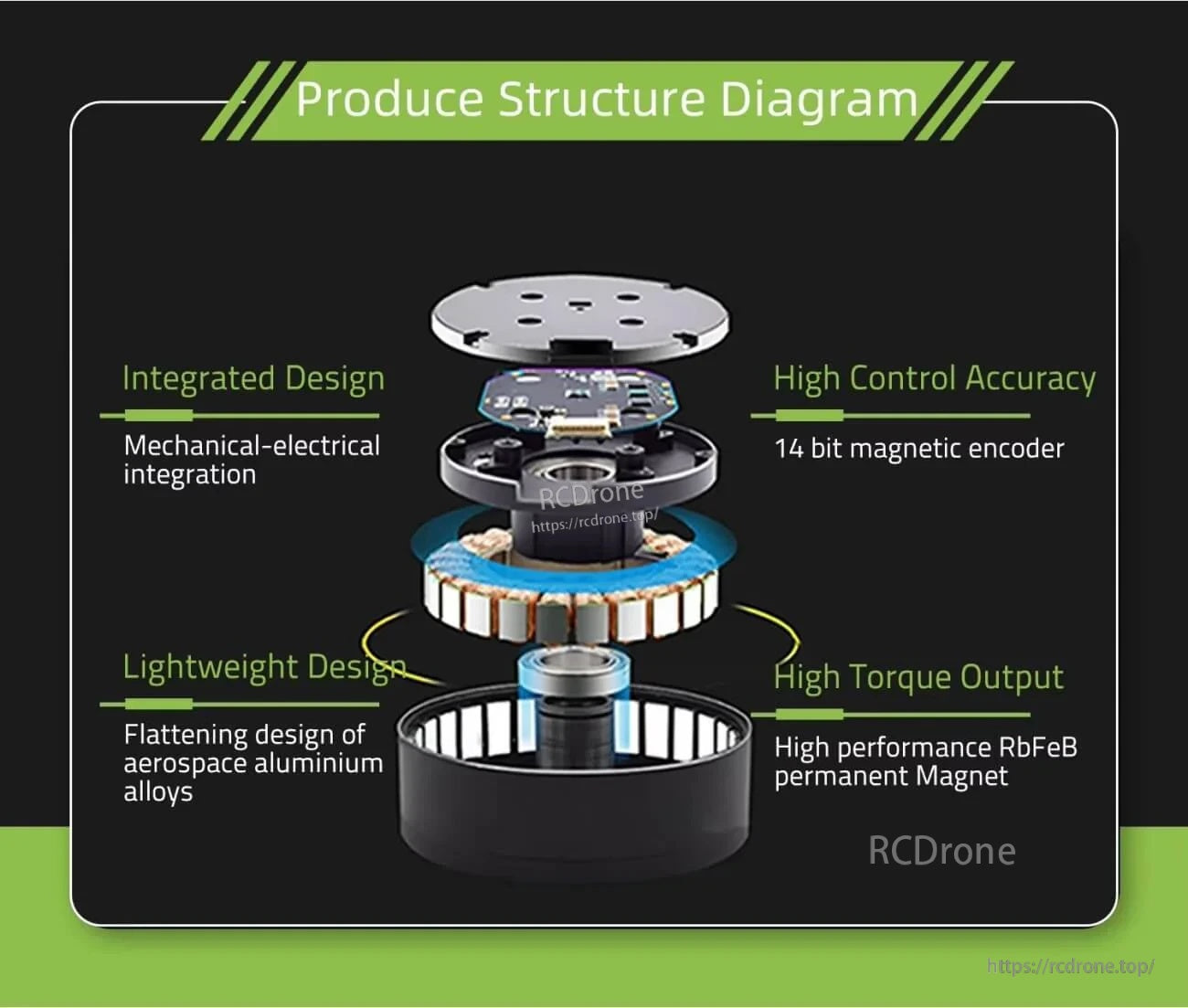
La construcción mecánico-eléctrica integrada mantiene el actuador compacto mientras soporta un control de bucle cerrado preciso para las articulaciones del robot.
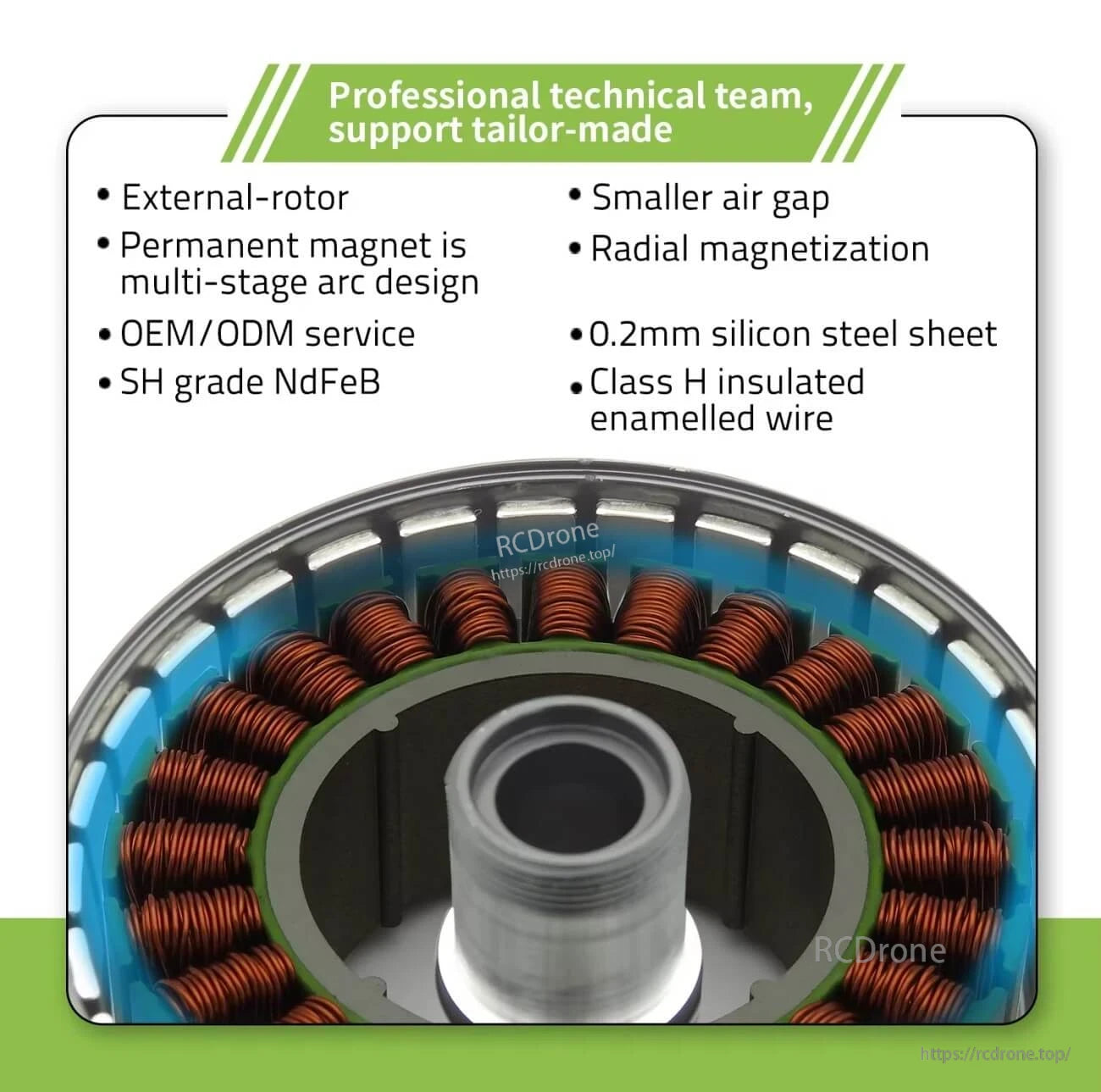
El diseño de rotor externo y el diseño de espacio de aire ajustado ayudan a proporcionar un par de respuesta en un formato de motor de articulación ligero.
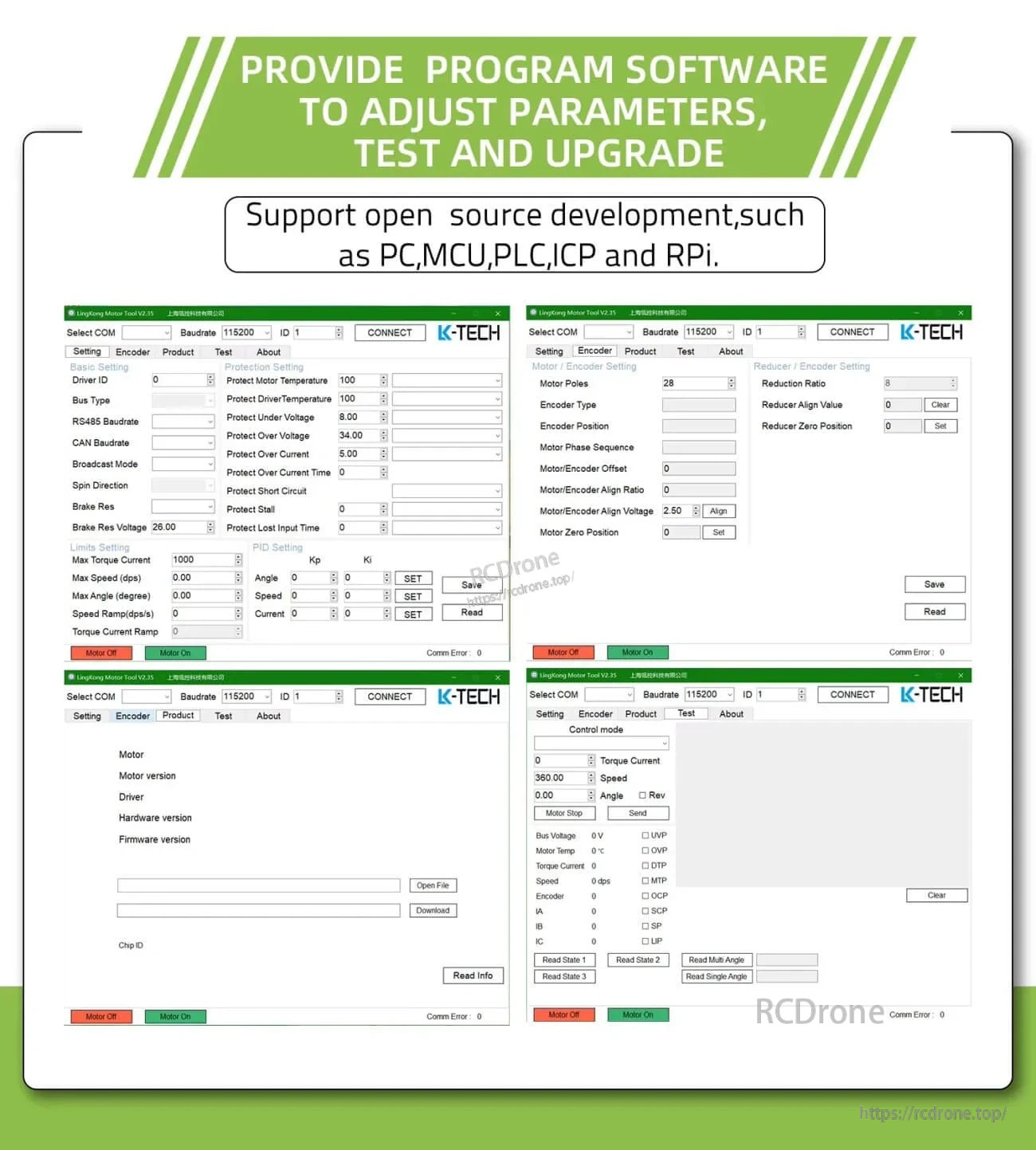
El software para PC está disponible para la configuración de parámetros, diagnósticos y actualizaciones de firmware cuando se utiliza con el controlador DF70V2 recomendado.

Related Collections



