



Motor LKMTECH MF7025-V2 24V (10T/28T/45T) Codificador Magnético de 18 bits, CAN/RS485, Controlador DF70V2
Motor LKMTECH MF7025-V2 24V (10T/28T/45T) Codificador Magnético de 18 bits, CAN/RS485, Controlador DF70V2
LKMTECH
No se pudo cargar la disponibilidad de retiro
Resumen
El LKMTECH MF7025-V2 Motor es un motor de 24V con un diseño integrado y ligero, construido para una alta precisión de control y un alto rendimiento de par. Soporta comunicación CAN o RS485, incluye monitoreo de temperatura del motor y utiliza un encoder magnético de 18 bits (resolución del encoder mejorada de 14 bits a 18 bits). También se enumeran la optimización del par de arrastre y el soporte de entrada PWM.
Características clave
- Diseño integrado / diseño ligero / alta precisión de control / alta salida de par
- Resolución del encoder: 14 bits mejorada a 18 bits
- Optimización del par de arrastre
- Soporta entrada PWM
- La comunicación CAN y RS485 soporta una variedad de tasas de baudios
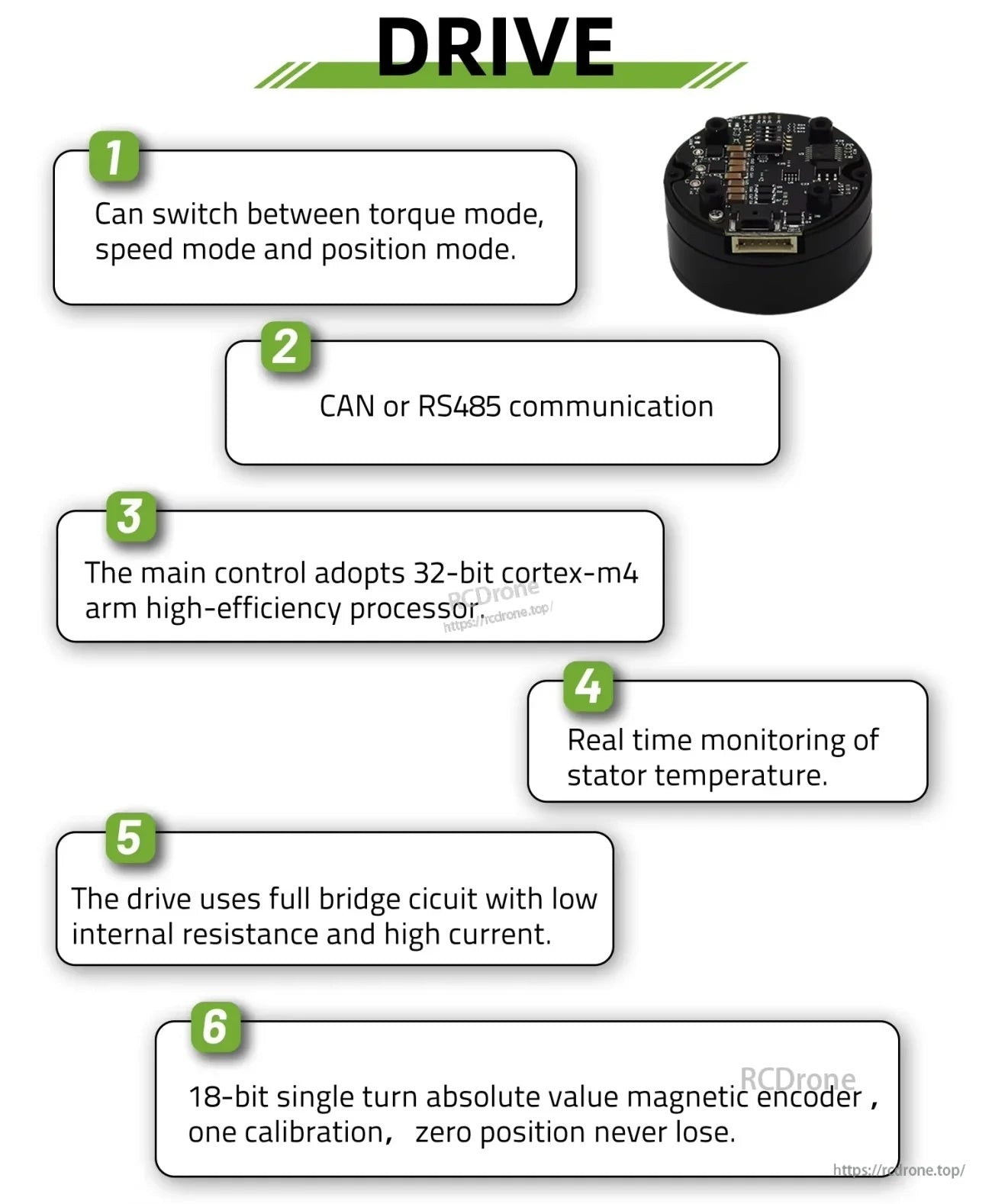
- Puede cambiar entre modo de par, modo de velocidad y modo de posición
- El control principal adopta un procesador ARM Cortex-M4 de 32 bits de alta eficiencia
- Monitoreo en tiempo real de la temperatura del estator
- El controlador utiliza un circuito de puente completo con baja resistencia interna y alta corriente
- Encoder magnético absoluto de un solo giro de 18 bits; una calibración; la posición cero nunca se pierde
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos
- Vehículos AGV
- Robots ARU
- Cámara PTZ
- Laser lidar
- Robot de inspección de estaciones de energía
- Inspección industrial
Especificaciones
Nombre del artículo: MF7025-V2
| Parámetro | MF7025-V2 (10 giros) | MF7025-V2 (28 giros) | MF7025-V2 (45 giros) |
|---|---|---|---|
| Voltaje nominal | 24V | 24V | 24V |
| Velocidad máxima | 1350RPM | 462RPM | 285RPM |
| Par de torsión nominal | 1.6N.m | 1.6N.m | 1.5N.m |
| Velocidad nominal | 970RPM | 250RPM | 100RPM |
| Corriente nominal | 8.9 A | 3.36A | 2A |
| Poder máximo | 278W | 44W | 17.5W |
| Par máximo | 2.1N.m | 2.9N.m | 2.7N.m |
| Constante de velocidad | 40rpm/V | 10.4rpm/V | 4.2rpm/V |
| Constante de par | 0.18N.m/A | 0.48N.m/A | 0.75N.m/A |
| Tipo de bobinado | Y | Y | Y |
| Resistencia de fase | 0.28Ω | 2.2Ω | 5.5Ω |
| Inductancia de fase | 0.24mH | 2.95mH | 7.6mH |
| Polos del motor | 28 | 28 | 28 |
| Inercia del rotor | 1040gcm^2 | 1040gcm^2^2 | 1040gcm^2 |
| Temperatura del motor | SÍ | SÍ | SÍ |
| Carga nominal del rodamiento | 330N | 330N | 330N |
| Peso del motor | 526g | 526g | 526g |
| Recomendación de conducción | DF70V2 | DF70V2 | DF70V2 |
| Tensión de entrada del controlador | 7.4-32V | 7.4-32V | 7.4-32V |
| Comunicación | RS485 O CAN | RS485 O CAN | RS485 O CAN |
| Frecuencia de Comunicación | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | Encoder Magnético de 18 bits | Encoder Magnético de 18 bits | Encoder Magnético de 18 bits |
| Tasa de Baud del Encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Tasa de Baud (CAN) | 100K,125K,250K,500K,1M | 100K,125K,250K,500K,1M | 100K,125K,250K,500K,1M |
| Modo de Control | Bucle de Torque(24KHz)/Bucle de Velocidad(8KHz)/Bucle de Posición(8KHz) | Bucle de Torque(24KHz)/Bucle de Velocidad(8KHz)/Bucle de Posición(8KHz) | Bucle de Torque(24KHz)/Bucle de Velocidad(8KHz)/Bucle de Posición(8KHz) |
| Curva de aceleración | Aceleración trapezoidal | Aceleración trapezoidal | Aceleración trapezoidal |
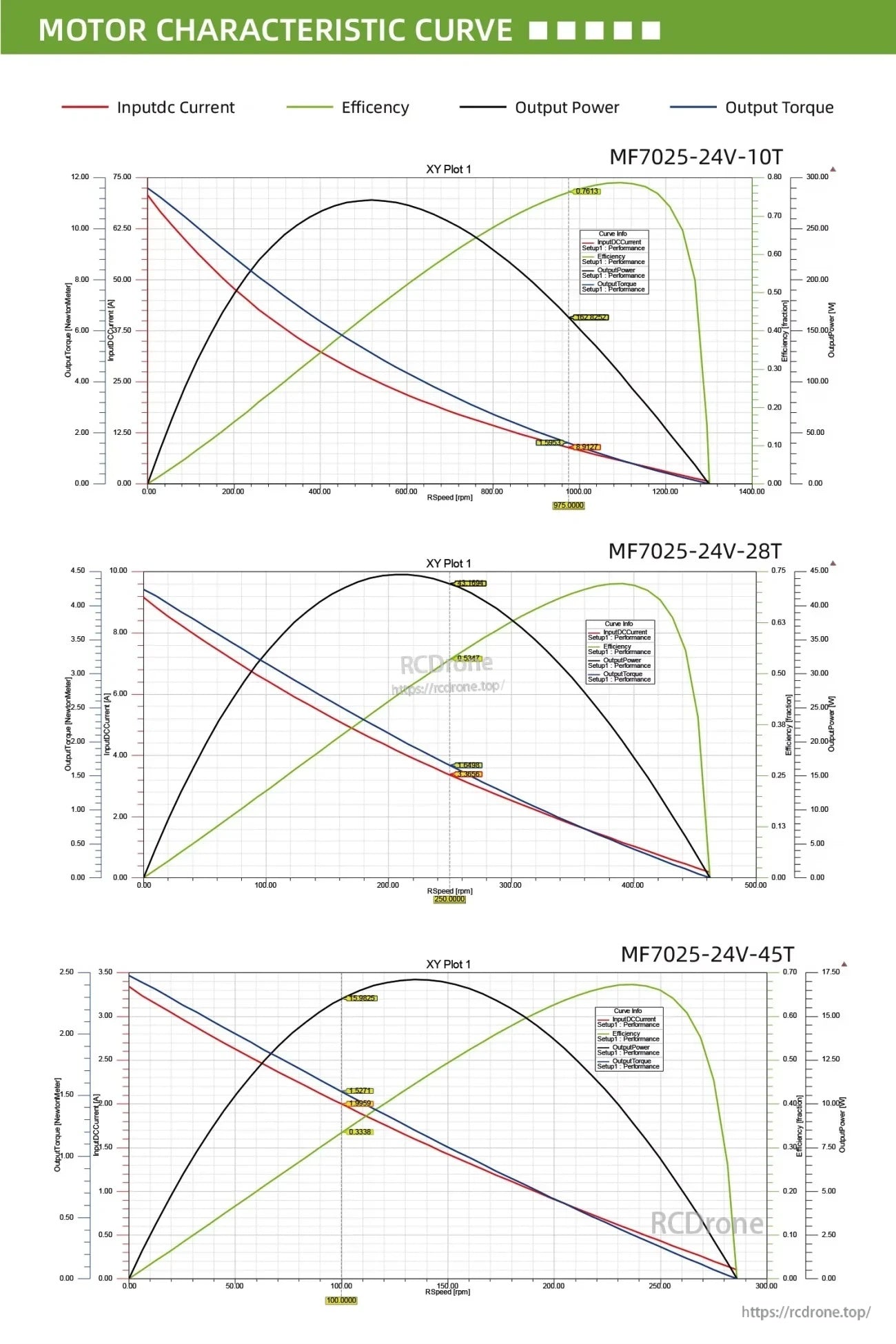
Curva característica del motor (Texto de etiqueta)
- Curva característica del motor
- Curvas: Corriente de entrada de CC / Eficiencia / Potencia de salida / Par de salida
- Títulos de gráficos: MF7025-24V-10T; MF7025-24V-28T; MF7025-24V-45T
Manuales
Para soporte de integración y asistencia con pedidos, contacte [email protected] or visite https://rcdrone.top/ .
Detalles

El MF7025‑V2 integra un motor ligero y un codificador magnético de 18 bits para un control de movimiento de alta precisión y alto par a través de CAN o RS485.
La electrónica de control DF70V2 soporta modos de par, velocidad y posición con comunicación CAN/RS485 y monitoreo de temperatura del estator incorporado.

Related Collections



