



Motor LKMTECH MF9010-V2 24V Integrado de Alto Par con Encoder de 18 bits, RS485/CAN, Controlador DF70v2
Motor LKMTECH MF9010-V2 24V Integrado de Alto Par con Encoder de 18 bits, RS485/CAN, Controlador DF70v2
LKMTECH
No se pudo cargar la disponibilidad de retiro
Descripción general
El LKMTECH Motor MF9010-V2 es una solución de motor integrada diseñada para aplicaciones que requieren un diseño liviano, alta precisión de control y alta salida de par. El MF9010 v2 incluye actualizaciones de producto como la resolución del encoder mejorada de 14 bits a 18 bits, optimización del par de arrastre, soporte de entrada PWM y comunicación CAN/RS485 con una variedad de tasas de baudios.
Características Clave
- Diseño integrado; diseño ligero; alta precisión de control; alta salida de par
- Resolución del encoder: 14 bits mejorada a 18 bits
- Optimización del par de arrastre
- Soporta entrada PWM
- Soporte de comunicación CAN y RS485 para una variedad de tasas de baudios
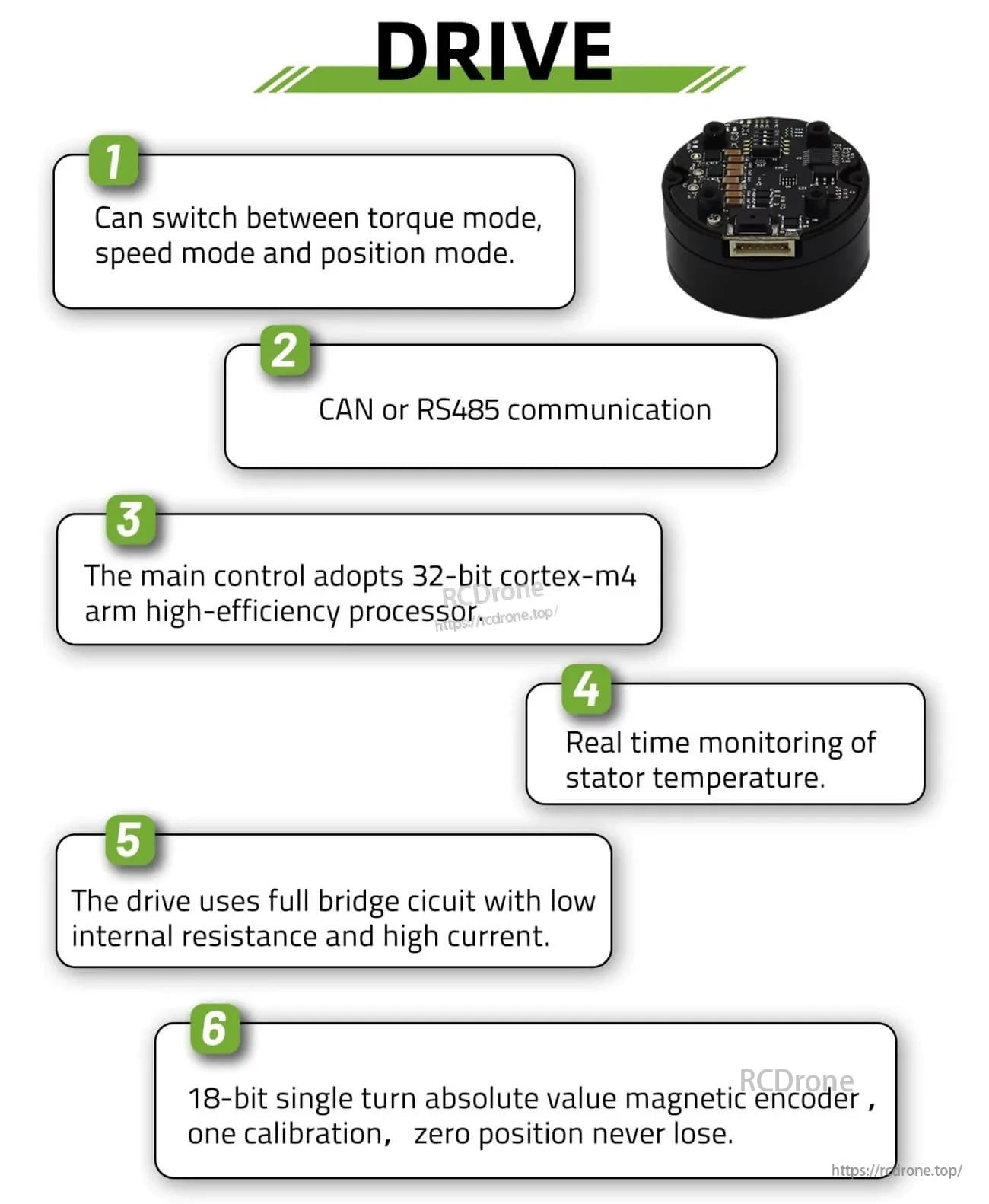
- El controlador puede cambiar entre modo de par, modo de velocidad y modo de posición
- El control principal adopta un procesador ARM cortex-m4 de 32 bits de alta eficiencia
- Monitoreo en tiempo real de la temperatura del estator
- El controlador utiliza un circuito de puente completo con baja resistencia interna y alta corriente
- Encoder magnético absoluto de un solo giro de 18 bits; una calibración; la posición cero nunca se pierde
- Software de programa proporcionado para ajustar parámetros, probar y actualizar
- Soporta desarrollo de código abierto, como PC, MCU, PLC, ICP y RPi
Aplicaciones
- Robots Humanoides
- Brazos Robóticos
- Exoesqueletos
- Robots Cuadrúpedos
- Vehículos AGV
- Robots ARU
- Cámara PTZ
- Laser Lidar
- Robot de Inspección de Estaciones de Energía
- Inspección Industrial
Especificaciones Técnicas
| Parámetro | MF9010v2 (17 Giros) | MF9010v2 (35 Giros) |
|---|---|---|
| Nombre del Artículo | MF9010v2 | MF9010v2 |
| Giros | 17 | 35 |
| Tensión Nominal | 24V | 24V |
| Velocidad Máxima | 1465RPM | 690RPM |
| Par de Trabajo Nominal | 1.09N.m | 1.07N.m |
| Velocidad nominal | 1080RPM | 450RPM |
| Corriente nominal | 6.66A | 3.27A |
| Potencia máxima | 215W | 128W |
| Par máximo | 2.2N.m | 4.1N.m |
| Constante de velocidad | 45rpm/V | 18.8rpm/V |
| Constante de par | 0.16N.m/A | 0.33N.m/A |
| Tipo de bobinado | Y | Y |
| Resistencia de fase | 0.29Ω | 1.15Ω |
| Inductancia de fase | 0.53mH | 3mH |
| Polos del motor | 28 | 28 |
| Inercia del rotor | 2860gcm² | 2860gcm² |
| Temperatura del motor | SÍ | SÍ |
| Carga nominal del rodamiento | 650N | 650N |
| Peso del motor | 525g | 525g |
| Recomendación de conducción | DF70v2 | DF70v2 |
| Tensión de entrada del controlador | 7.4-32V | 7.4-32V |
| Comunicación | RS485 O CAN | RS485 O CAN |
| Frecuencia de Comunicación | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | Encoder Magnético de 18 bits | Encoder Magnético de 18 bits |
| Tasa de Baud del Encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Tasa de Baud (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Modo de Control | Bucle de Torque (24KHz)/Bucle de Velocidad (8KHz)/Bucle de Posición (8KHz) | Bucle de Torque (24KHz)/Bucle de Velocidad (8KHz)/Bucle de Posición (8KHz) |
| Curva de Aceleración | Aceleración trapezoidal | Aceleración trapezoidal |
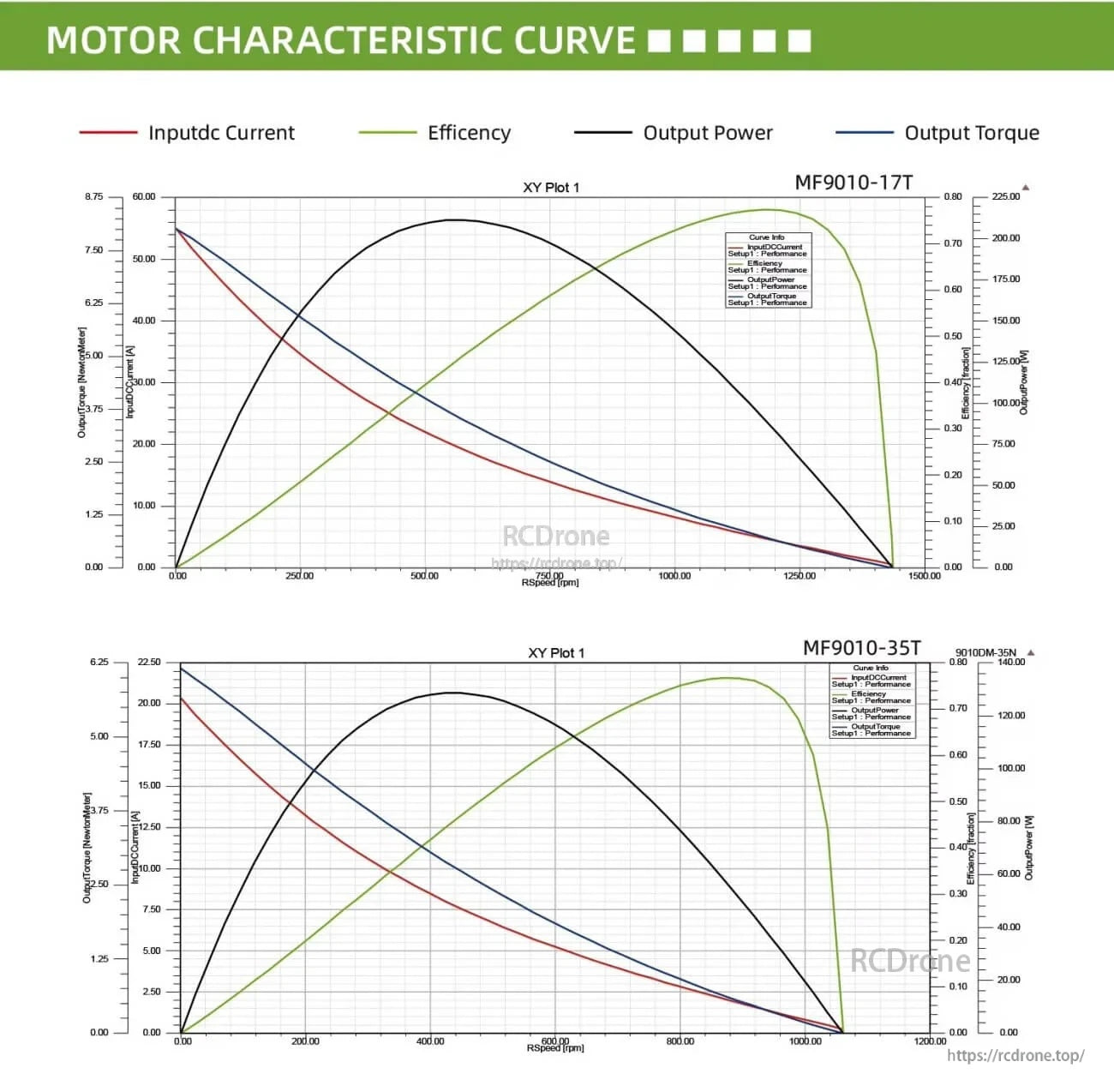
Curva de características del motor (Referencia)
- Leyendas de la CURVA DE CARACTERÍSTICAS DEL MOTOR: Corriente de entrada de CC, Eficiencia, Potencia de salida, Par de salida
- Etiquetas de la curva mostradas: MF9010-17T y MF9010-35T
Manuales / Documentos
Para orientación en la selección y soporte de integración, contacta [email protected] or visita https://rcdrone.top/ .
Detalles

MF9010 V2 combina motor, codificador y preparación para integración de control de movimiento compacto que necesita control de movimiento preciso y de alto par.
Múltiples modos de control y conectividad CAN/RS485 facilitan la sintonización del actuador para diferentes juntas de robots y ejes de automatización.
Las curvas de rendimiento ayudan a comparar los devanados de 17 vueltas y 35 vueltas para tu velocidad objetivo, par y rango de eficiencia.
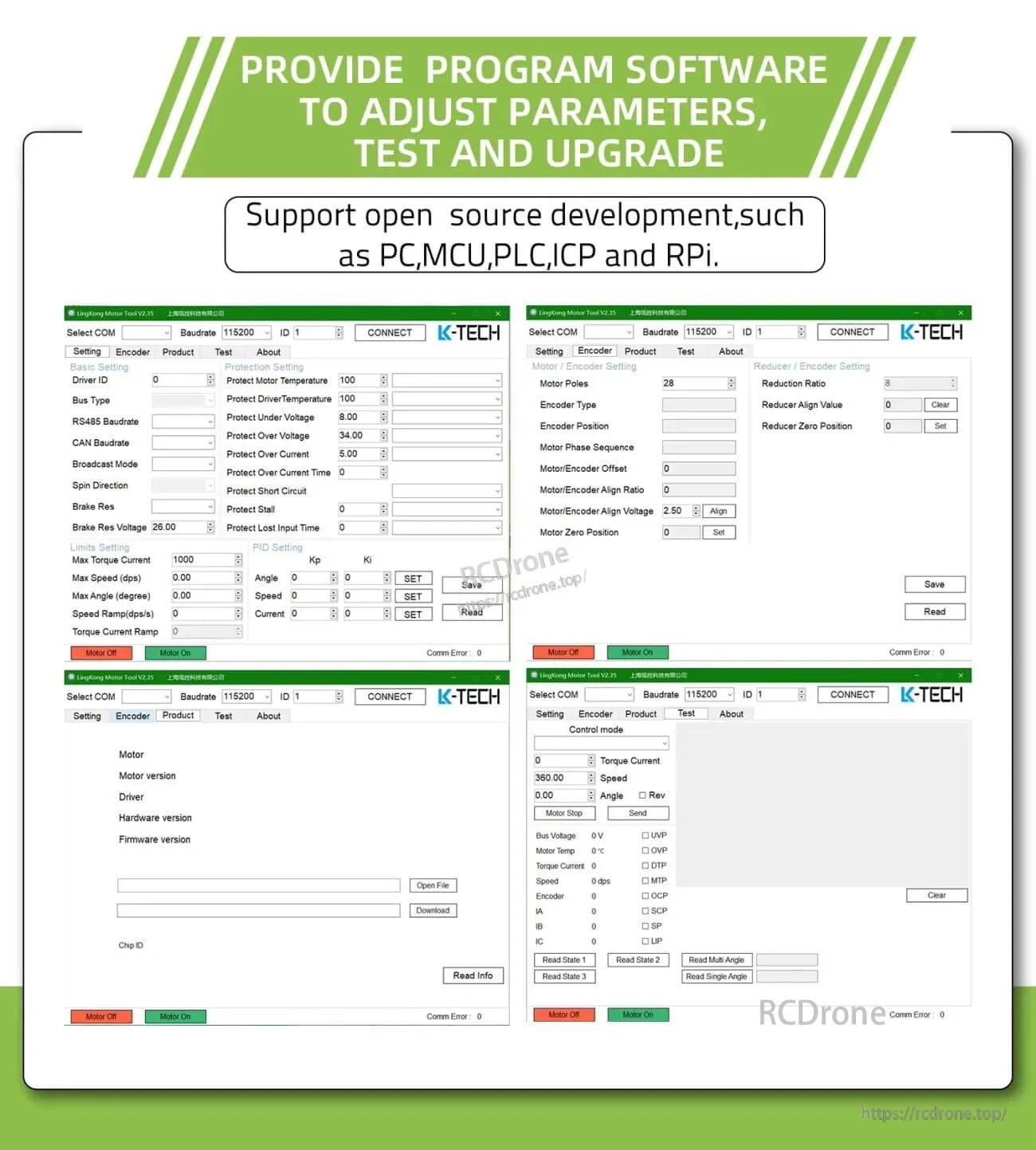
Se proporciona software de configuración para ajuste de parámetros, pruebas y actualizaciones durante la puesta en marcha y el mantenimiento.
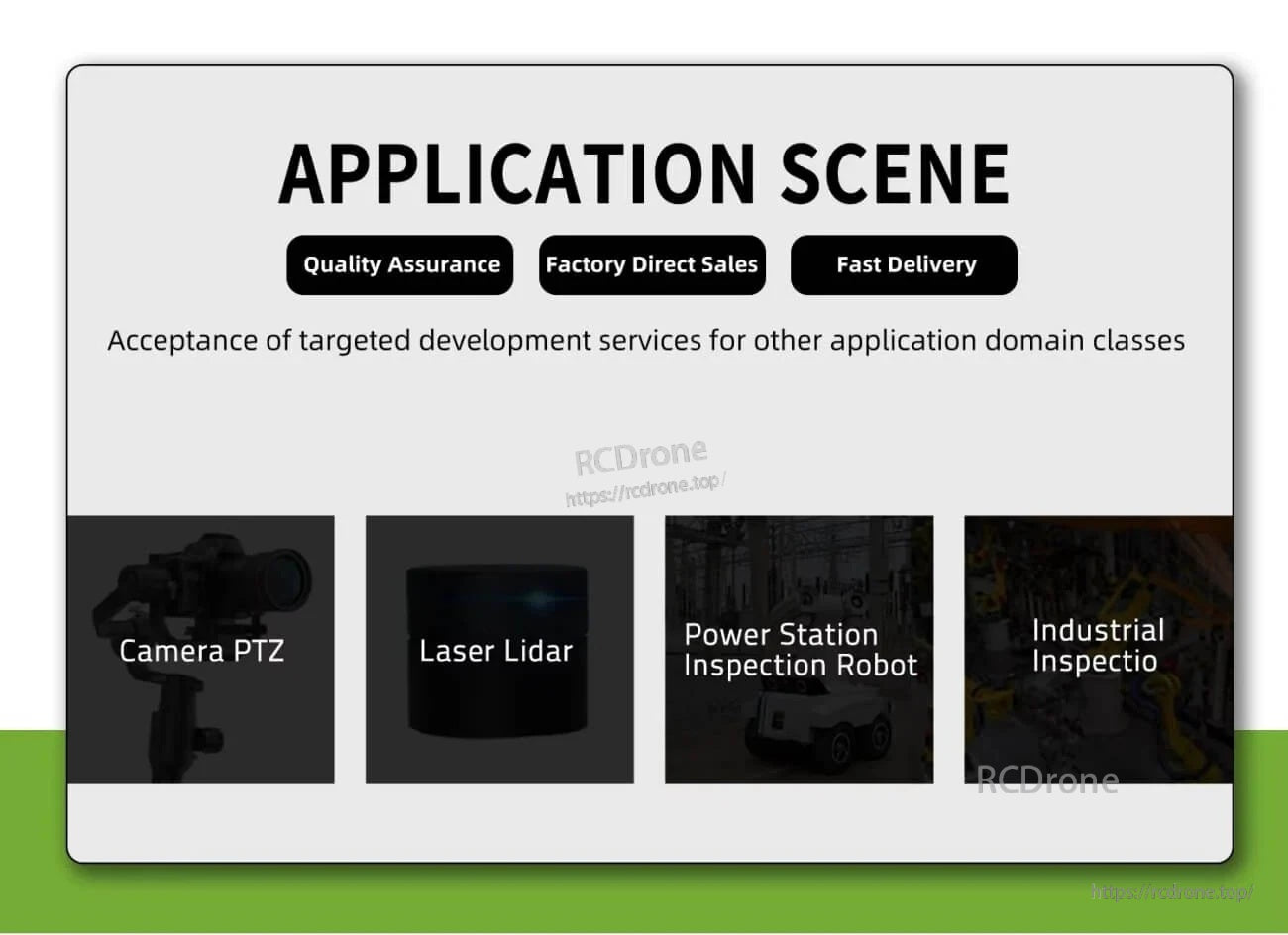
Los casos de uso comunes incluyen sistemas PTZ y lidar, además de robots de inspección y otros proyectos de automatización móvil.
Related Collections



