




Motor sin escobillas LKMTECH MG10015E-i10-V2 con reductor PG7407 1:10, 48V 1200W, RS485/CAN
Motor sin escobillas LKMTECH MG10015E-i10-V2 con reductor PG7407 1:10, 48V 1200W, RS485/CAN
LKMTECH
No se pudo cargar la disponibilidad de retiro
Resumen
Características Clave
- Textos destacados en la etiqueta: “El más alto estándar de diseño de producto”, “Alta Potencia de Salida”, “Gran Torque de Salida”, “Alta Precisión”.
- Motor sin escobillas de alta potencia + reductor planetario de alta precisión + controlador FOC de alto rendimiento (como se indica en la etiqueta).
- Tensión de entrada del motor: 12-60V.
- Comunicación: CAN o RS485.
- Control principal: frecuencia principal de 170M con ARM de 32 bits (como se indica en la etiqueta).
- Encoder absoluto de anillo único de 18 bits (como se indica en la etiqueta).
- Una calibración; posición cero nunca se pierde; no es necesario encontrar el punto cero después de una pérdida de energía (como se indica en la etiqueta).
- Soporta software de herramientas de motor para ajuste de parámetros, pruebas y actualización de firmware (como se indica).
- Soporta plataformas de desarrollo de código abierto como PC, MCU, PLC, ICP y RPi (como se indica).
Especificaciones
| Nombre del artículo | MG10015E-i10-V2 |
| Voltaje nominal | 48V |
| Velocidad máxima | 185RPM |
| Velocidad nominal | 150RPM |
| Par nominal | 25N.m |
| Par máximo | 45N.m |
| Corriente nominal | 11.5A |
| Poder máximo | 1200W |
| Constante de velocidad | 38rpm/V |
| Constante de par | 1.4N.m/A |
| Giros | 15 |
| Tipo de Bobinado | Δ |
| Resistencia de Fase | 0.38Ω |
| Inductancia de Fase | 0.45mH |
| Polos del motor | 42 |
| Inercia del rotor | 5668gcm² |
| Temperatura del motor | SÍ |
| Tipo de reductor | PG7407 |
| Relación de reducción | 1:10 |
| Juego | ≤8 arcmin |
| Carga nominal del rodamiento | 1430N |
| Peso del motor | 1213g |
| Recomendación de accionamiento | DG60E |
| Tensión de entrada del accionamiento | 12-60V |
| Comunicación | RS485 O CAN |
| Frecuencia de comunicación | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| Encoder | 18 bits (Motor) & 14 bits (Reductor) Encoder magnético |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1Mbps, 2Mbps |
| Baudrate (CAN) | 100000, 125000, 250000, 500000, 1M |
| Modo de Control | Bucle de Torque (32KHz) / Bucle de Velocidad (8KHz) / Bucle de Posición (4KHz) |
| Curva de Aceleración | Aceleración Trapezoidal |
| Dimensiones (como se indica) | Φ106 x 50.7 |
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos
- Vehículos AGV / coche AGV
- Perro robot
- Robot portátil
- Robots ARU
Documentos
Para comprobaciones de compatibilidad previas a la venta (integración RS485/CAN, coincidencia de accionamiento DG60E recomendada y preguntas sobre la interfaz del encoder), contacte con soporte en https://rcdrone.top/ o envíe un correo electrónico a [email protected] .
Detalles

El MG10015E‑i10‑V2 integra un motor compacto y reductor para unidades de accionamiento robótico de alto par.
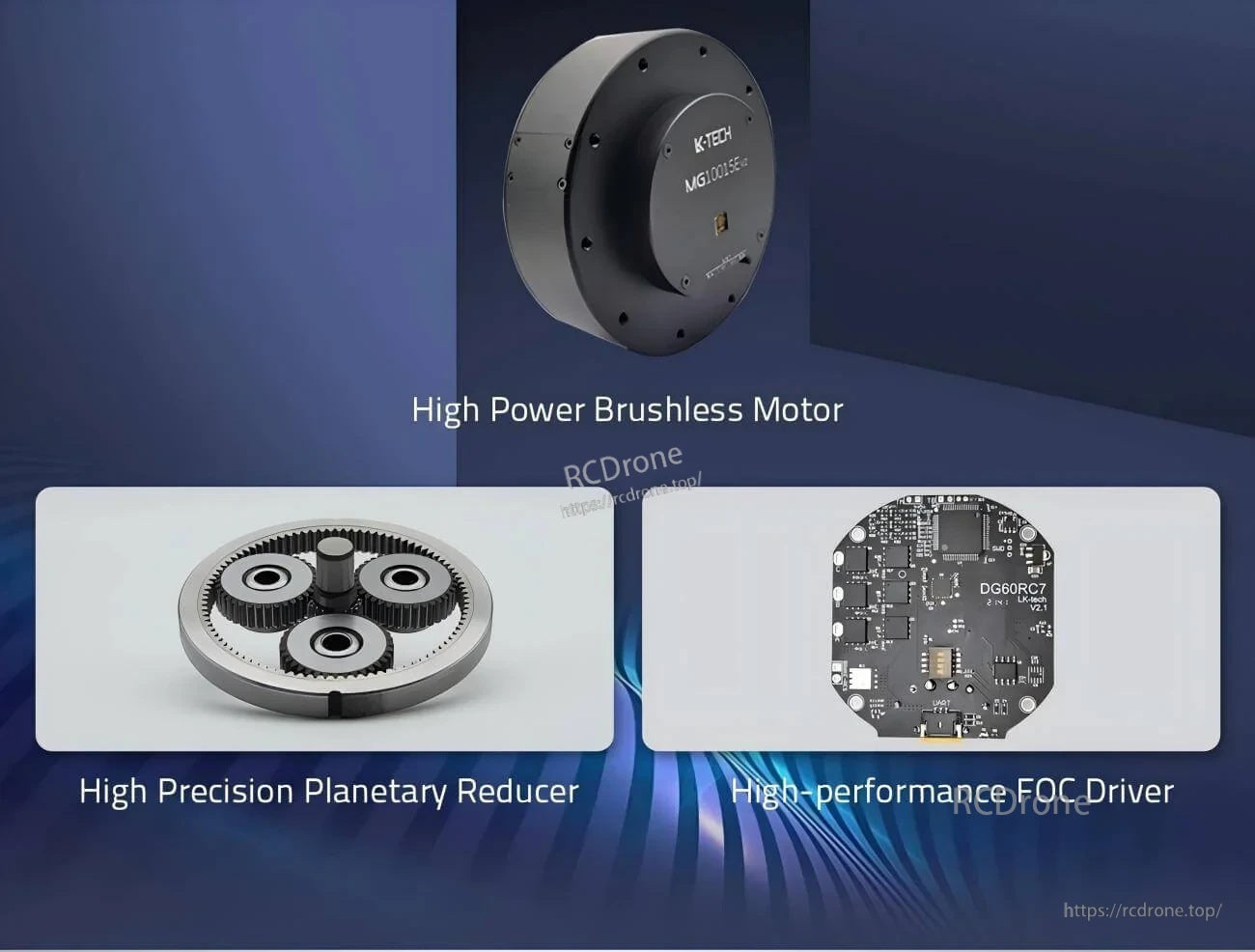
Una solución completa de articulación combina el motor sin escobillas, reductor planetario de precisión y controlador FOC para control en bucle cerrado.
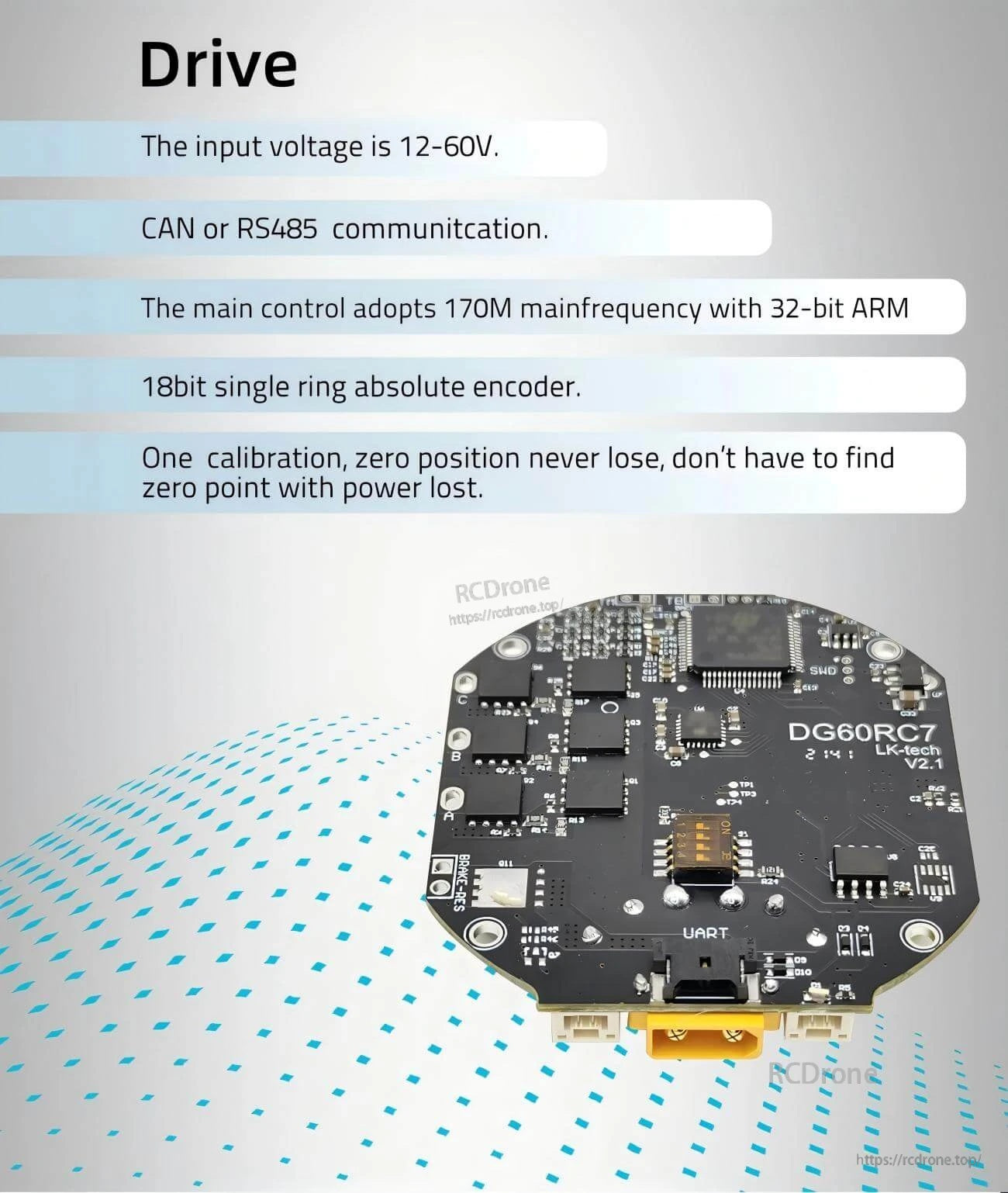
La electrónica de control admite una entrada de 12–60V y comunicación CAN o RS485 para una fácil integración con controladores comunes.

El reductor planetario PG7407 1:10 está diseñado para un bajo retroceso (≤8 arcmin) en un paquete compacto de Φ106 × 50.7 mm.
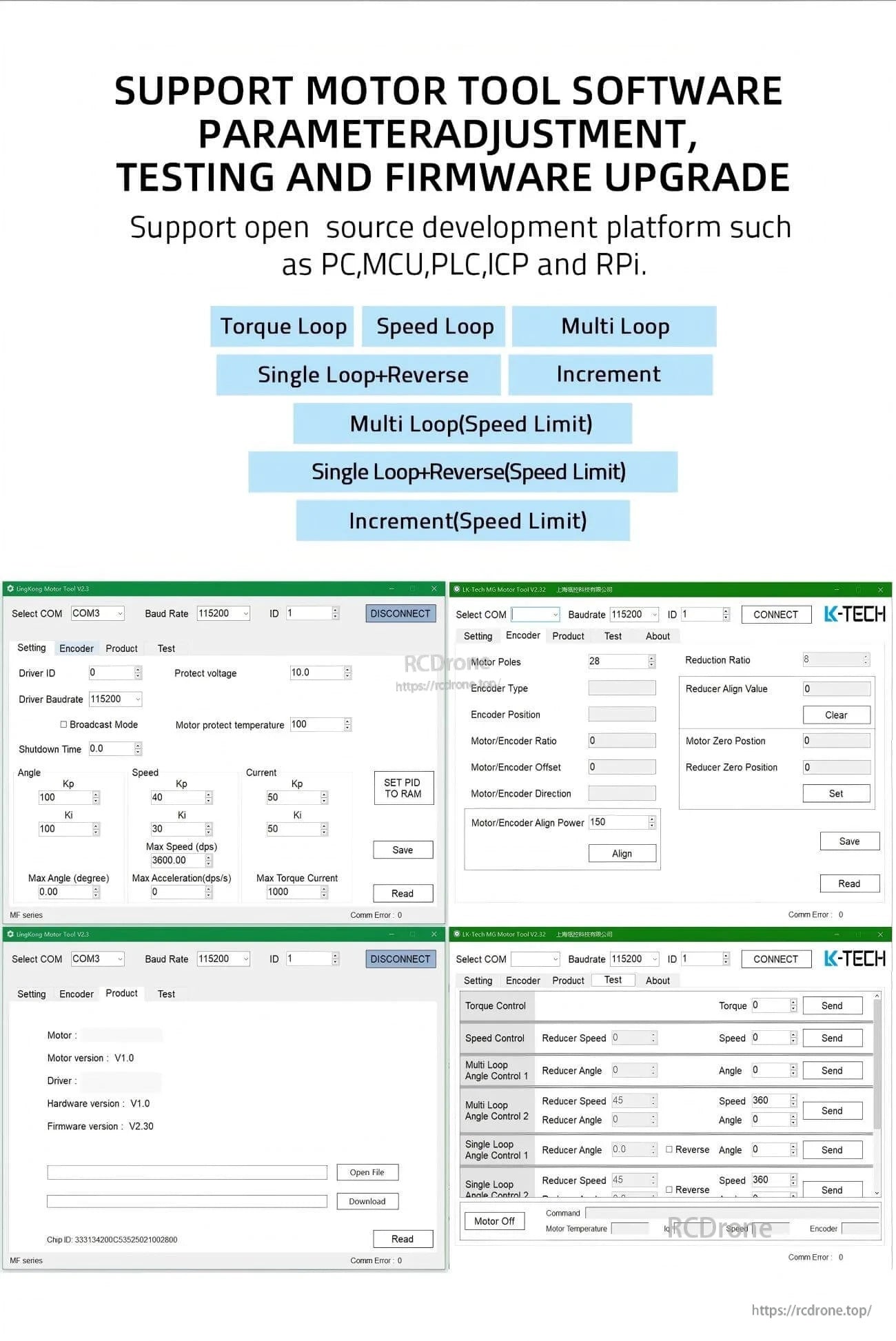
El software de herramientas de motor permite la sintonización de parámetros, pruebas funcionales y actualizaciones de firmware durante la puesta en marcha.
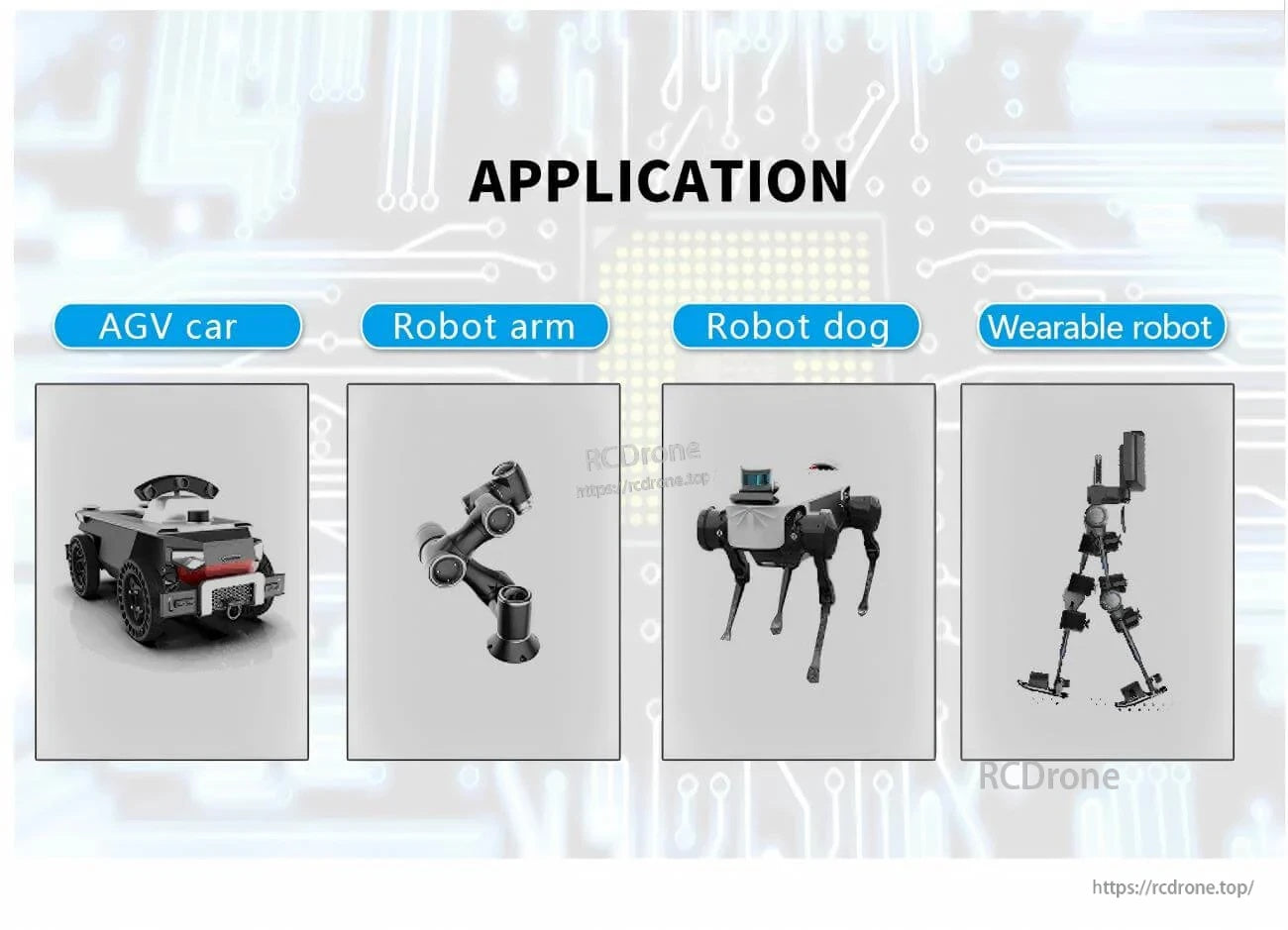
Las aplicaciones comunes incluyen AGVs, brazos robóticos, cuadrúpedos y articulaciones robóticas portátiles.
Related Collections




