




Motor sin escobillas LKMTECH MG4005-V2 con reductor 1:10 PG4210, RS485/CAN, codificador de 18 bits
Motor sin escobillas LKMTECH MG4005-V2 con reductor 1:10 PG4210, RS485/CAN, codificador de 18 bits
LKMTECH
No se pudo cargar la disponibilidad de retiro
Resumen
El LKMTECH Motor MG4005-V2 es un módulo de motor sin escobillas diseñado para la actuación en robótica. Integra un reductor planetario PG4210 (1:10) y un encoder magnético de 18 bits, con comunicación a través de RS485 o CAN para control de torque/velocidad/posición en bucle cerrado.
Características Clave
- Motor sin escobillas de alta potencia
- Reductor planetario de alta precisión: retroceso ≤10 arcmin, relación 1:10
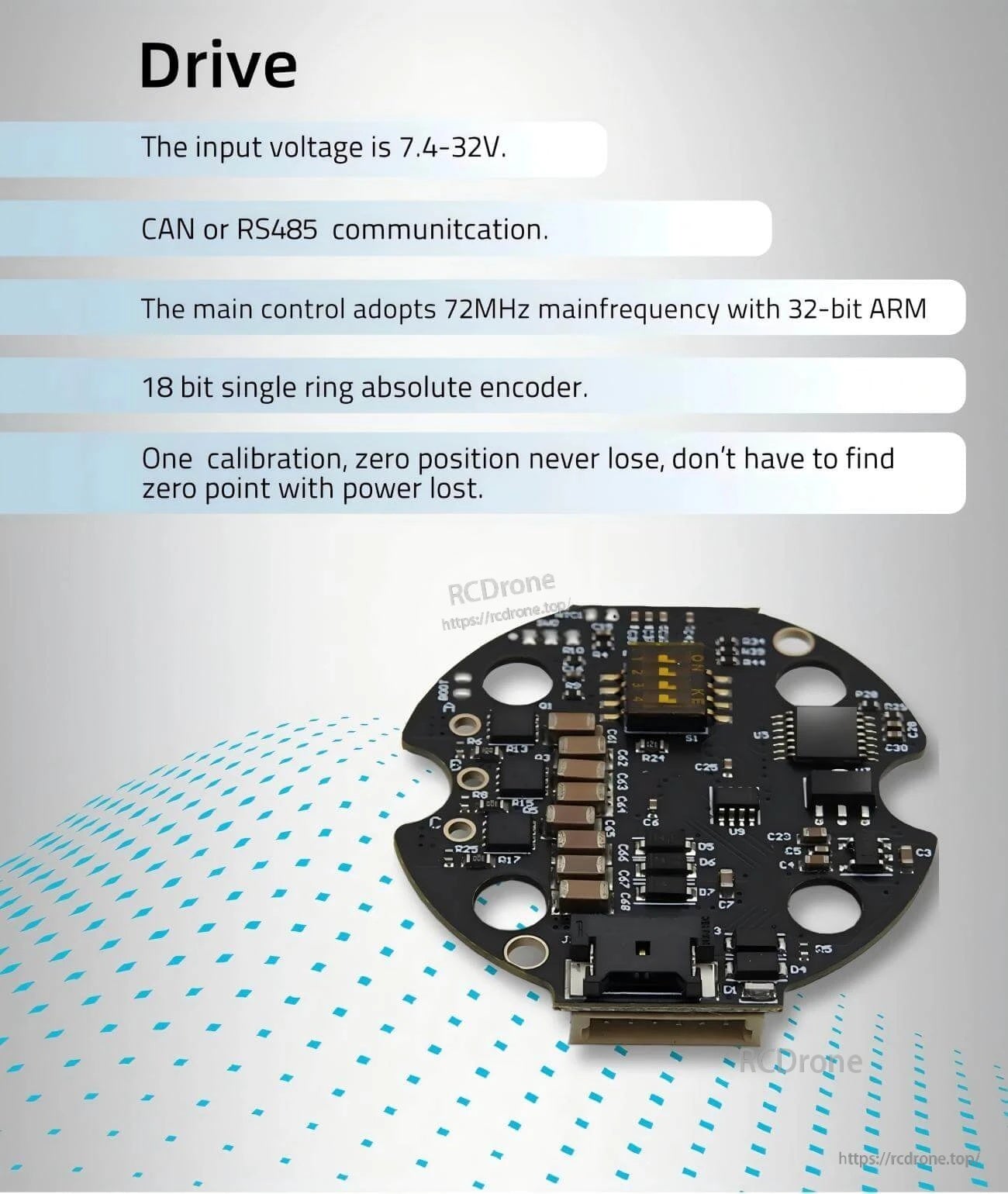
- Encoder absoluto de anillo único de 18 bits; una calibración, la posición cero se mantiene después de la pérdida de energía
- Comunicación: CAN o RS485
- Tensión de entrada del controlador: 7.4-32V
- Control principal: frecuencia principal de 72MHz con ARM de 32 bits
- Soporta entrada PWM; par de motor optimizado para un funcionamiento más suave
- Soporte de software para herramientas de motor: ajuste de parámetros, pruebas y actualización de firmware
- Soporta plataformas de desarrollo de código abierto como PC, MCU, PLC, ICP y RPi
Especificaciones
| Nombre del artículo | MG4005-V2 |
| Tensión nominal | 24V |
| Velocidad máxima | 320RPM |
| Velocidad nominal | 255RPM |
| Par nominal | 1N.m |
| Par máximo | 2.5N.m |
| Corriente nominal | 1.8A |
| Poder máximo | 65W |
| Constante de velocidad | 106.3rpm/V |
| Constante de Torque | 0.06N.m/A |
| Vueltas | 28 |
| Tipo de Bobinado | Y |
| Resistencia de Fase | 1.4Ω |
| Inductancia de Fase | 0.5mH |
| Polos del Motor | 28 |
| Inercia del rotor | 140gcm² |
| Temperatura del Motor | SÍ |
| Tipo de Reductor | PG4210 |
| Relación de Reducción | 1:10 |
| Juego | ≤10 arcmin |
| Carga Nominal del Rodamiento | 1000N |
| Peso del Motor | 154g |
| Recomendar Conducción | DF40 |
| Tensión de entrada del Conductor | 7.4-32V |
| Comunicación | RS485 O CAN |
| Frecuencia de Comunicación | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | Encoder Magnético de 18 bits |
| Baudrate del Encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 1M |
| Modo de Control | Bucle de Torque (24KHz)/Bucle de Velocidad (8KHz)/Bucle de Posición (4KHz) |
| Curva de Aceleración | Aceleración Trapezoidal |
Definición de Interfaz
| Interfaz | Nota |
|---|---|
| A/L | RS485-A o CAN-L |
| B/H | RS485-B o CAN-H |
| V- | Fuente de Alimentación Negativa |
| V- | Fuente de alimentación negativa |
| V+ | Fuente de alimentación positiva |
| V+ | Fuente de alimentación positiva |
| T | Transmisor UART |
| R | Receptor UART |
| G | GND de señal |
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos / robots portátiles
- Robots cuadrúpedos / perro robot
- Vehículos AGV / coche AGV
- Robots ARU
Manuales
Para cableado, integración y soporte postventa, contacte https://rcdrone.top/ o envíe un correo electrónico a [email protected] .
Detalles

Diseñado para la actuación robótica, el MG4005‑V2 combina un motor sin escobillas compacto y una caja de engranajes en un módulo fácil de integrar.
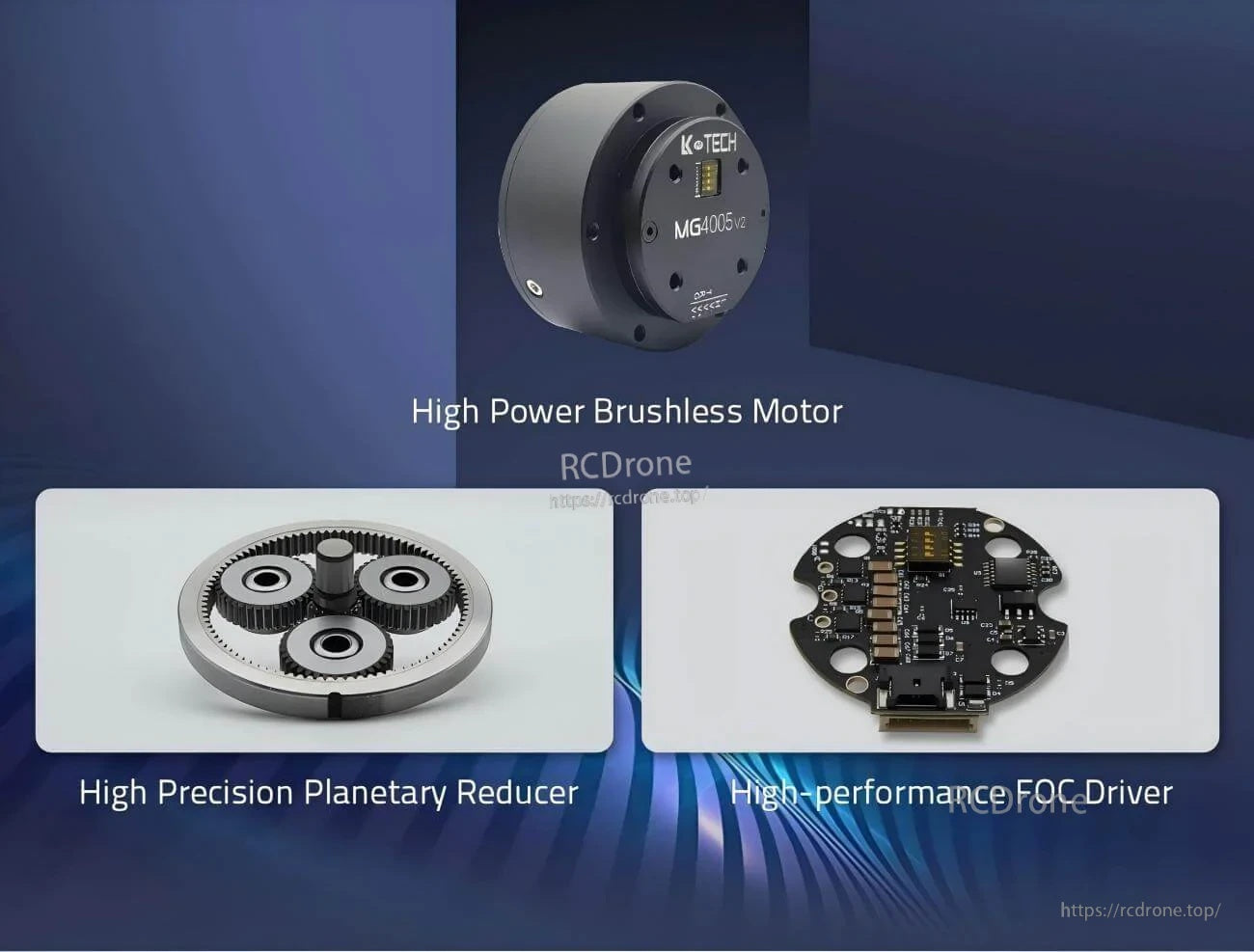
Un motor emparejado, un reductor planetario y una placa de control ayudan a simplificar el control de torque, velocidad y posición en bucle cerrado.
La comunicación CAN o RS485 y un amplio rango de entrada de 7.4–32V facilitan la integración en controladores robóticos comunes.

La comparación de versiones destaca la actualización del encoder del MG4005‑V2 a retroalimentación absoluta de 18 bits y soporte para entrada PWM.
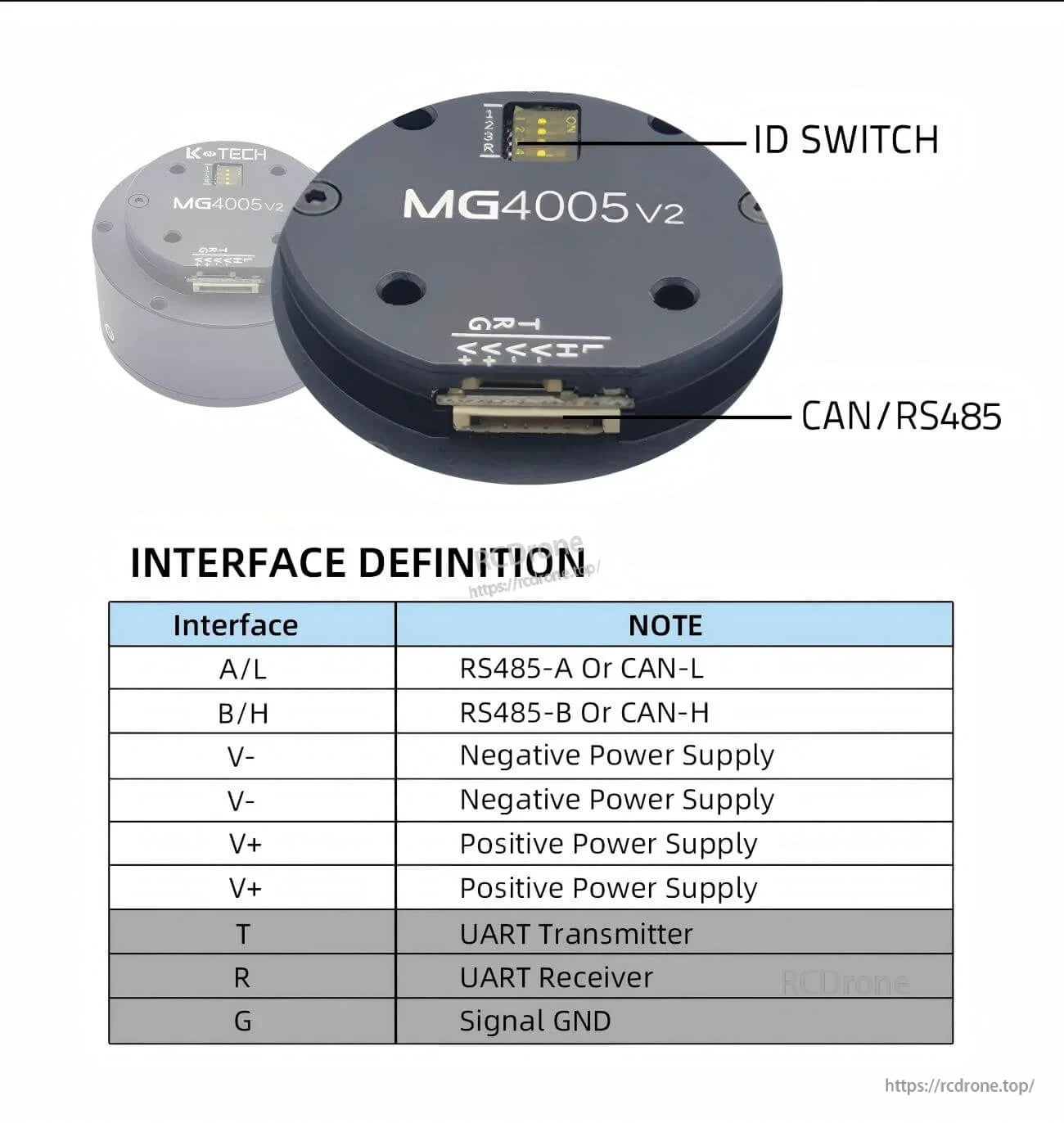
Las definiciones de pines y el interruptor de ID a bordo ayudan a optimizar el cableado multi-eje y la configuración del bus.

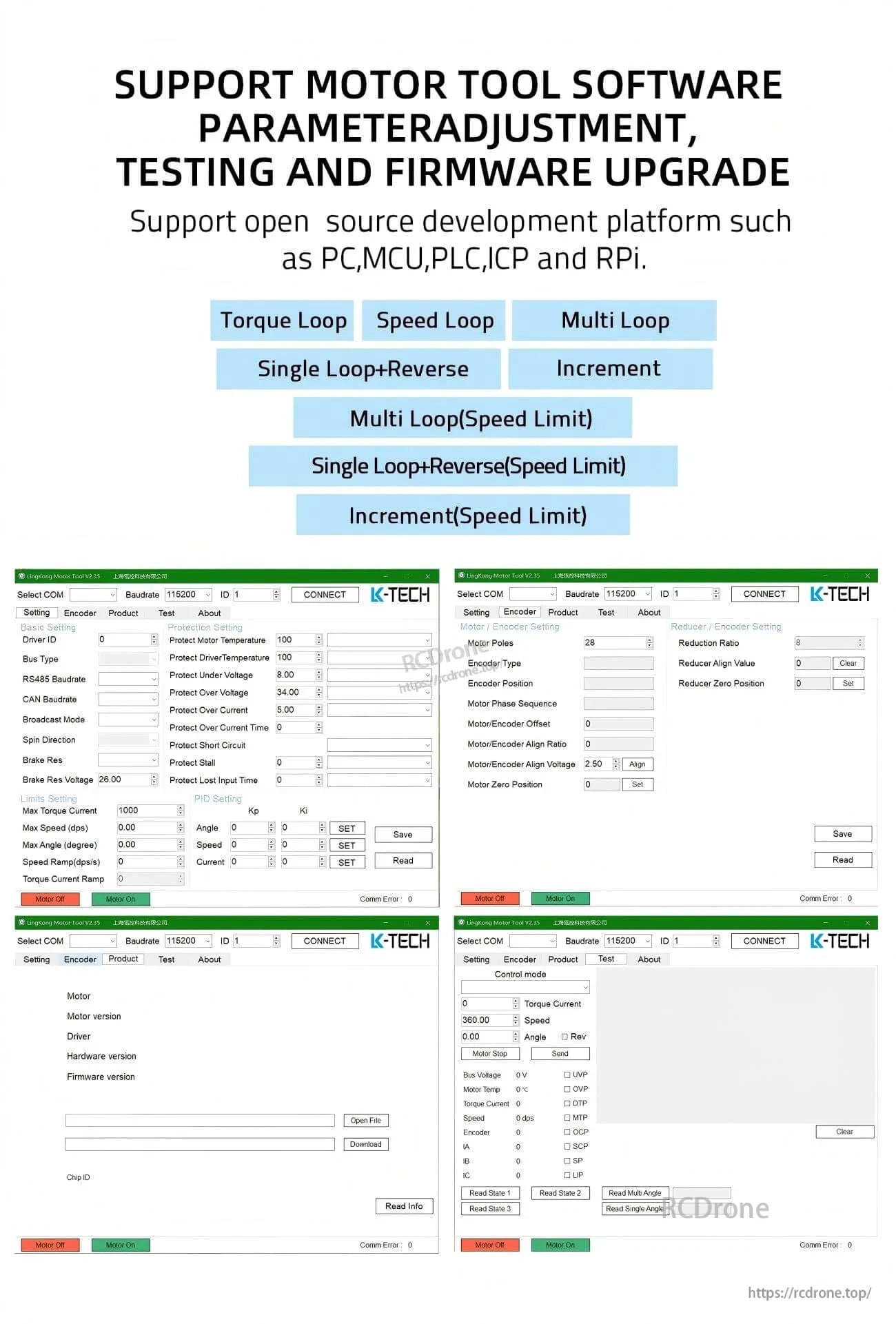
El software de herramientas del motor soporta la sintonización de parámetros, pruebas y actualizaciones de firmware durante la configuración y el mantenimiento.

Related Collections




