




Motor de engranajes planetarios LKMTECH MG4010E-i36-V3 24V 1:36 RS485/CAN con codificador magnético para robótica
Motor de engranajes planetarios LKMTECH MG4010E-i36-V3 24V 1:36 RS485/CAN con codificador magnético para robótica
LKMTECH
No se pudo cargar la disponibilidad de retiro
Resumen
El LKMTECH MG4010E-i36-V3 Motor es un motor de engranaje planetario diseñado para robótica y actuadores de control de movimiento. Combina un motor sin escobillas, un reductor planetario y un encoder magnético, con opciones de comunicación listadas como RS485 o CAN.
Características clave
- Motor de engranaje planetario (MG4010E-i36, V3).
- Relación de transmisión: 1:36 (también mostrado como “Relación de transmisión 1:36”).
- Juego de engranaje: 7 arcmin (etiqueta de imagen) / 12 arcmin (tabla de especificaciones).
- Encoder: encoder magnético absoluto de 18 bits de una vuelta (texto de imagen); también listado como encoder magnético de 18 bits (motor) + 14 bits (reductor) (tabla de especificaciones).
- Comunicación: RS485 o CAN.
- Controlador de FOC/driver de referencia (texto de imagen: “Controlador FOC de alto rendimiento”).
- Freno incorporado (texto de imagen/etiqueta de UI).
- Parámetros de host/pruebas/actualizaciones de firmware soportados (texto de imagen).
Especificaciones
| Nombre del artículo | MG4010E-i36-V3 |
| Tensión nominal | 24V |
| Velocidad máxima | 90RPM |
| Velocidad nominal | 77RPM |
| Corriente nominal | 2.4A |
| Potencia máxima | 132W |
| Par nominal | 6 N.m (tabla de especificaciones) / 9 N.m (etiqueta de imagen) |
| Par máximo | 13 N.m (tabla de especificaciones) / 18 N.m (etiqueta de imagen) |
| Constante de velocidad | 3 rpm/V |
| Constante de par | 2.58 N.m/A |
| Vueltas | 14 |
| Tipo de bobinado | Y |
| Resistencia de fase | 0.68 Ω |
| Inductancia de fase | 0.25 mH |
| Polos del motor | 28 |
| Inercia del rotor | 158 gcm² |
| Temperatura del motor | SÍ |
| Tipo de reductor | PG5336 |
| Relación de reducción | 1:36 |
| Juego | ≤12 arcmin (tabla de especificaciones) / 6 arcmin (etiqueta de imagen) |
| Carga nominal del rodamiento | 1120 N |
| Peso del motor | 378 g |
| Recomendación de accionamiento | DG40E |
| Tensión de entrada del accionamiento | 12-24V (tabla de especificaciones) / 12-60V (etiqueta de imagen) |
| Comunicación | RS485 O CAN |
| Frecuencia de comunicación | RS485: 500 Hz (115200 bps) / CAN: 2 KHz (1 Mbps) |
| Encoder | 18bit (motor) + 14bit (reductor) Encoder Magnético |
| Baudrate del Encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2 Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M |
| Modo de Control | Bucle de Torque (24 KHz) / Bucle de Velocidad (8 KHz) / Bucle de Posición (4 KHz) |
| Curva de Aceleración | Aceleración trapezoidal |
| Tamaño del Motor | Φ 53*54.5 (etiqueta de imagen) |
Definición de Interfaz
- Interruptor de ID (etiqueta de imagen: “INTERRUPTOR DE ID”).
| Puerto | Instrucciones |
|---|---|
| A/H | RS485-A o CAN-H |
| B/L | RS485-B o CAN-L |
| V- | Fuente de Alimentación Negativa |
| V+ | Fuente de Alimentación Positiva |
| T | Transmisor UART |
| R | Receptor UART |
| G | GND de Señal |
Escenarios de Aplicación
- Robots Humanoides
- Brazos Robóticos
- Exoesqueletos
- Robots Cuadrúpedos
- Vehículos AGV / coche AGV
- Robots ARU
- Perro Mecánico
- Robot de Servicio
- Lidar de Mano
- Robot de Entrenamiento de Rehabilitación
- Robot de Inspección
Control & Notas del Software
- Soporta plataformas de desarrollo de código abierto como PC, MCU, PLC, ICP y RPi.
- Modos listados (texto de imagen): Modo de par, Modo de velocidad, Modo de control de múltiples vueltas, Modo de posición + dirección de una sola vuelta, Modo de posición incremental; también se muestran versiones con límite de velocidad.
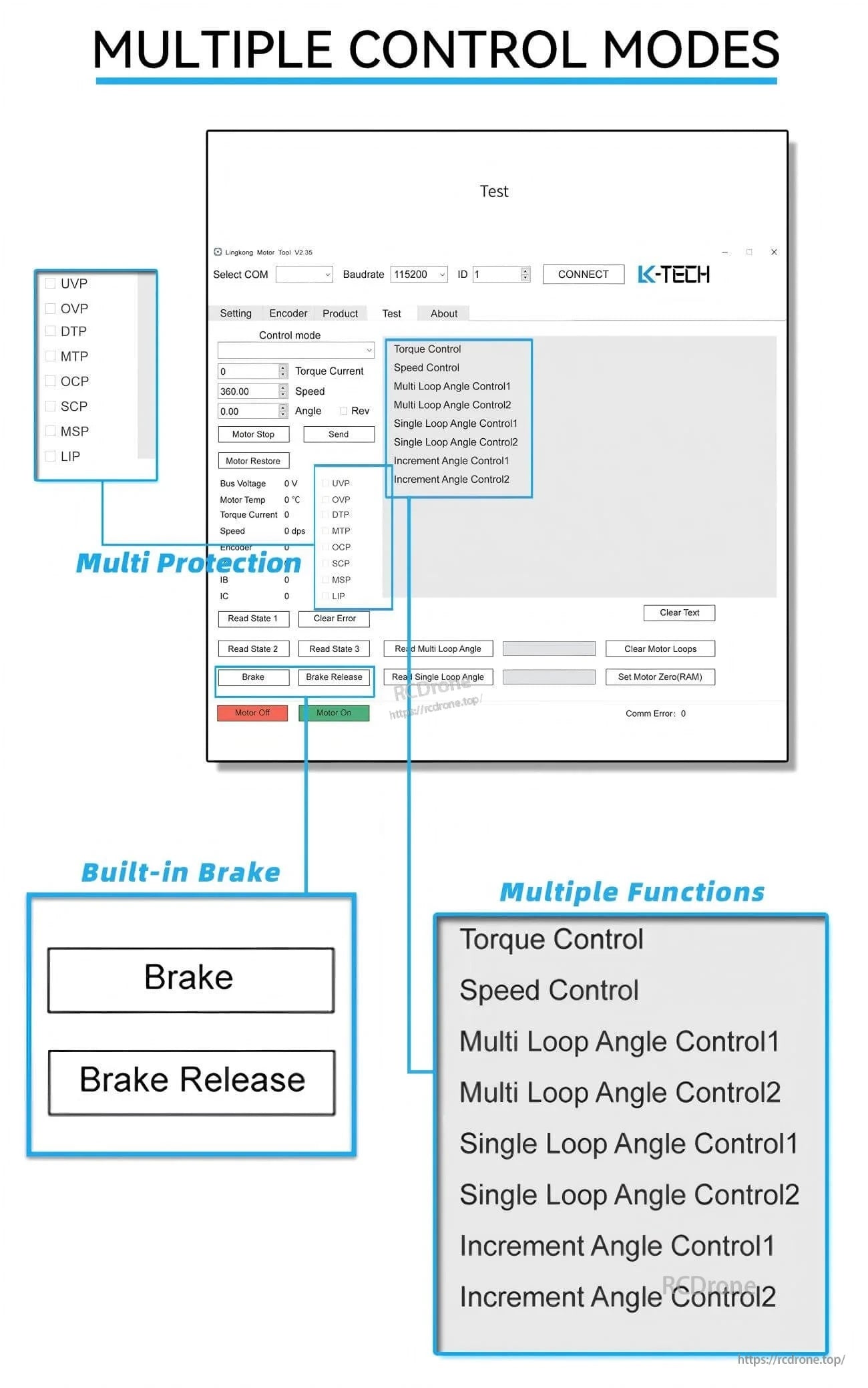
- Múltiples modos de control mostrados en la interfaz de usuario: Control de Par, Control de Velocidad, Control de Ángulo de Múltiples Bucles1, Control de Ángulo de Múltiples Bucles2, Control de Ángulo de Un Solo Bucle1, Control de Ángulo de Un Solo Bucle2, Control de Ángulo Incremental1, Control de Ángulo Incremental2.
- Etiquetas de protección múltiple mostradas: UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP.
- Controles de freno integrados mostrados: Freno, Liberación de Freno.
Para verificaciones de compatibilidad previas a la venta (integración RS485/CAN, selección de tasa de baudios) o ayuda para el acceso a archivos, contacte [email protected] or visite https://rcdrone.top/.
Manuales / Documentos
Detalles

El MG4010E-i36-V3 combina un motor sin escobillas, un reductor planetario y un encoder magnético para actuadores robóticos compactos.
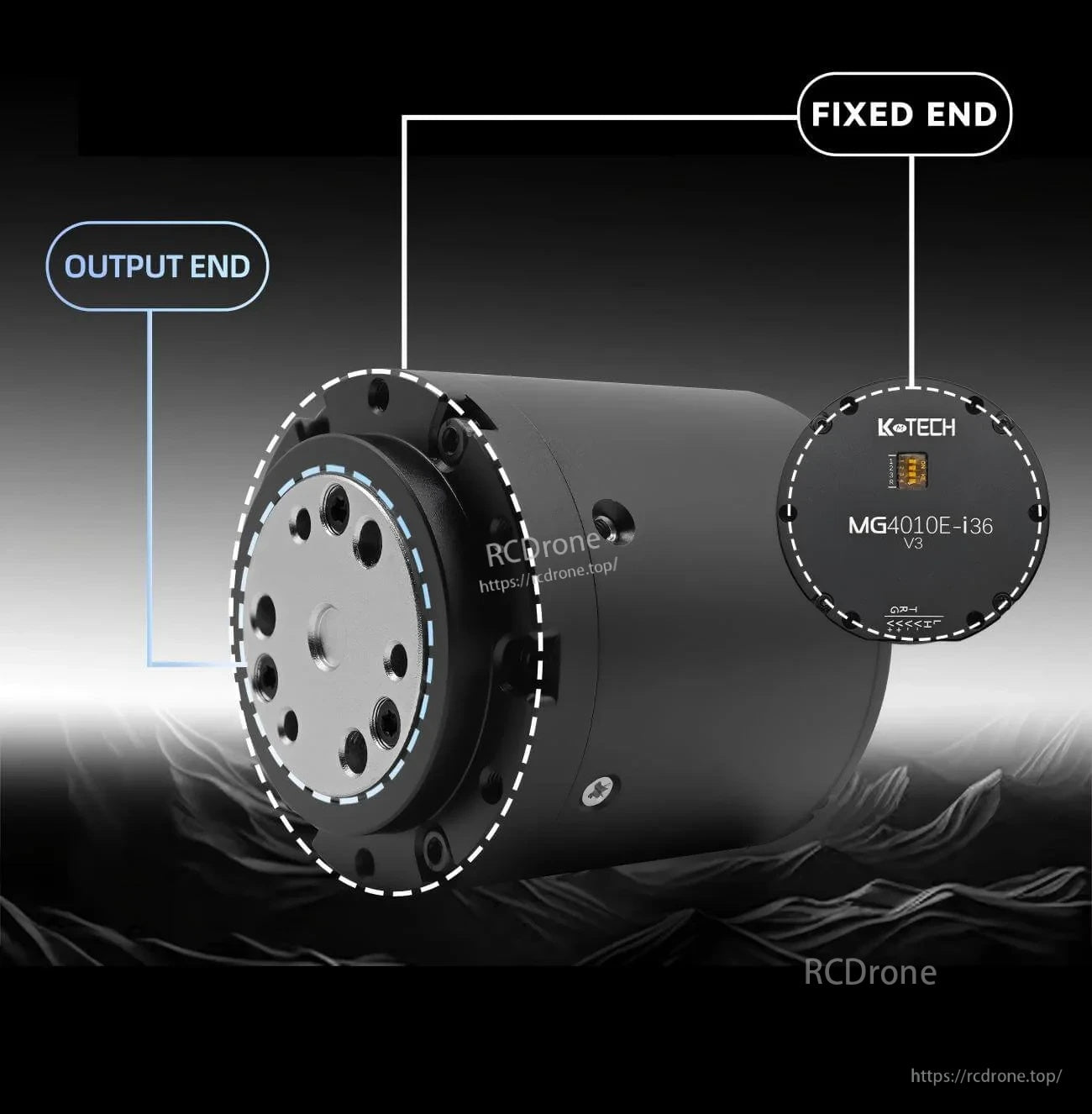
Un extremo de salida de estilo brida y un diseño de extremo fijo facilitan la integración en brazos, piernas y otros módulos de articulación.

La comunicación RS485 o CAN se empareja con un controlador FOC y retroalimentación de encoder magnético absoluto para un control estable de torque, velocidad y posición.
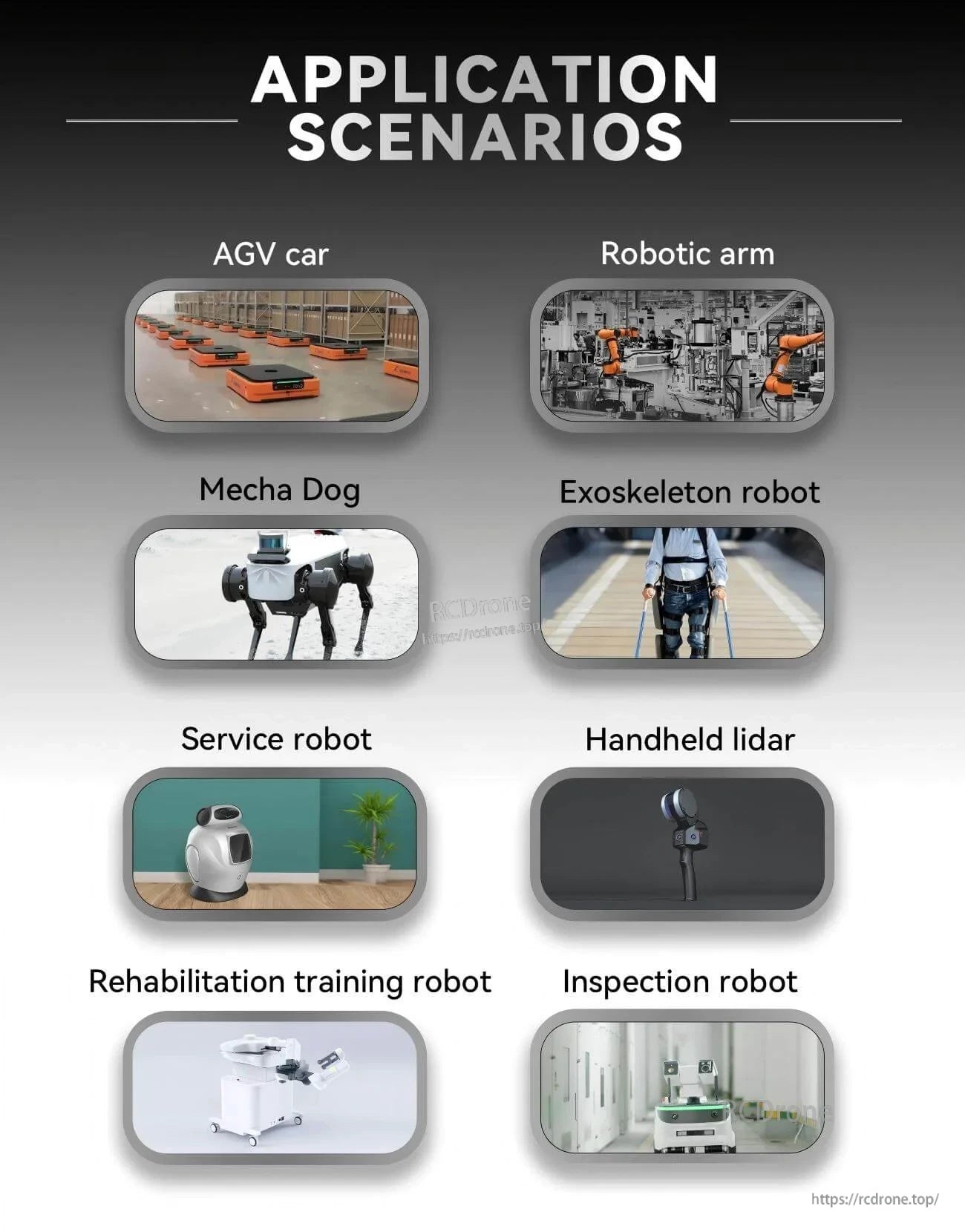
Los casos de uso comunes incluyen AGVs, brazos robóticos, plataformas cuadrúpedas, exoesqueletos y robots de inspección o servicio.
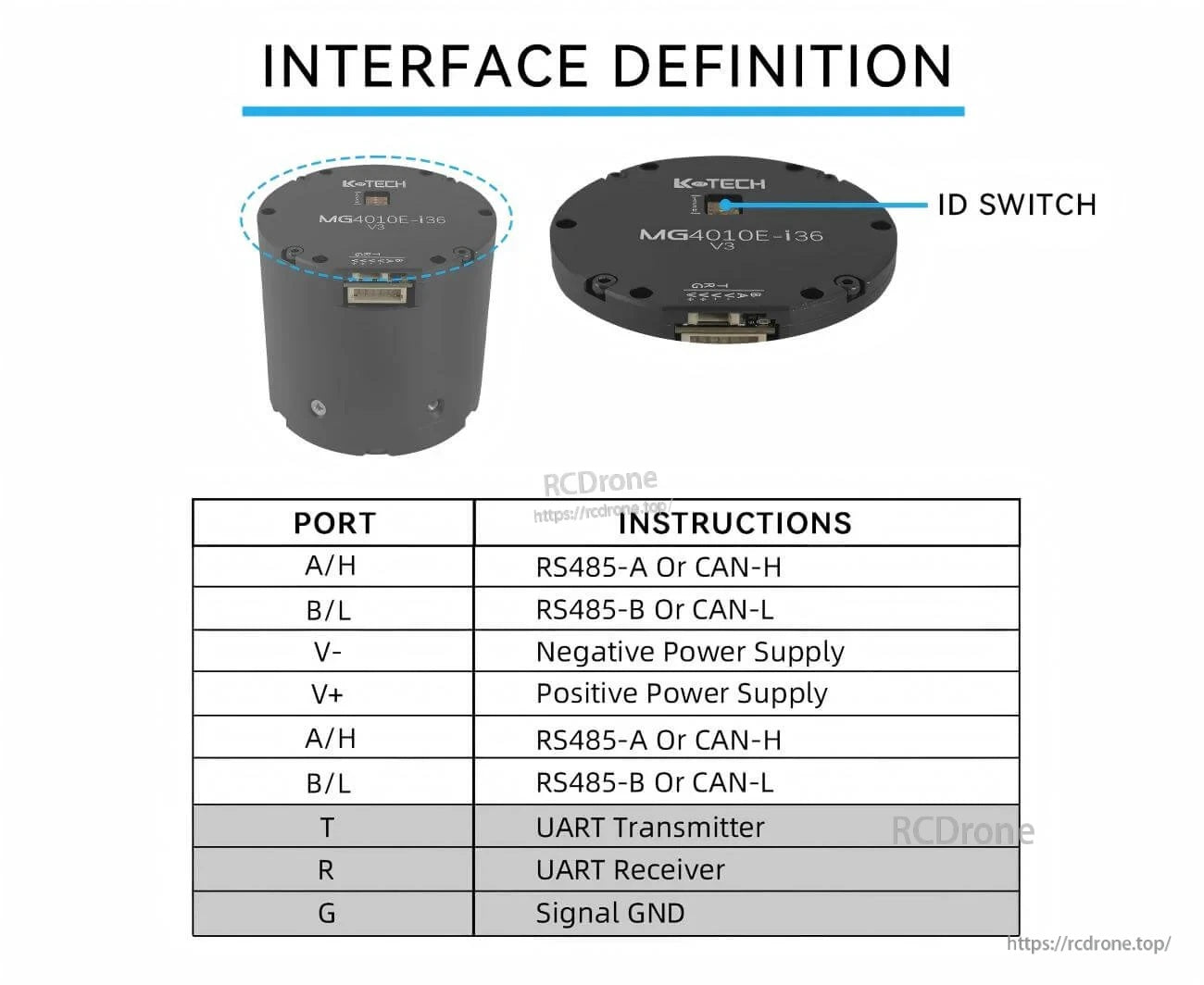
El cableado se simplifica con pines de bus RS485/CAN etiquetados, conexiones de alimentación, UART Tx/Rx, tierra de señal y un interruptor de ID a bordo.
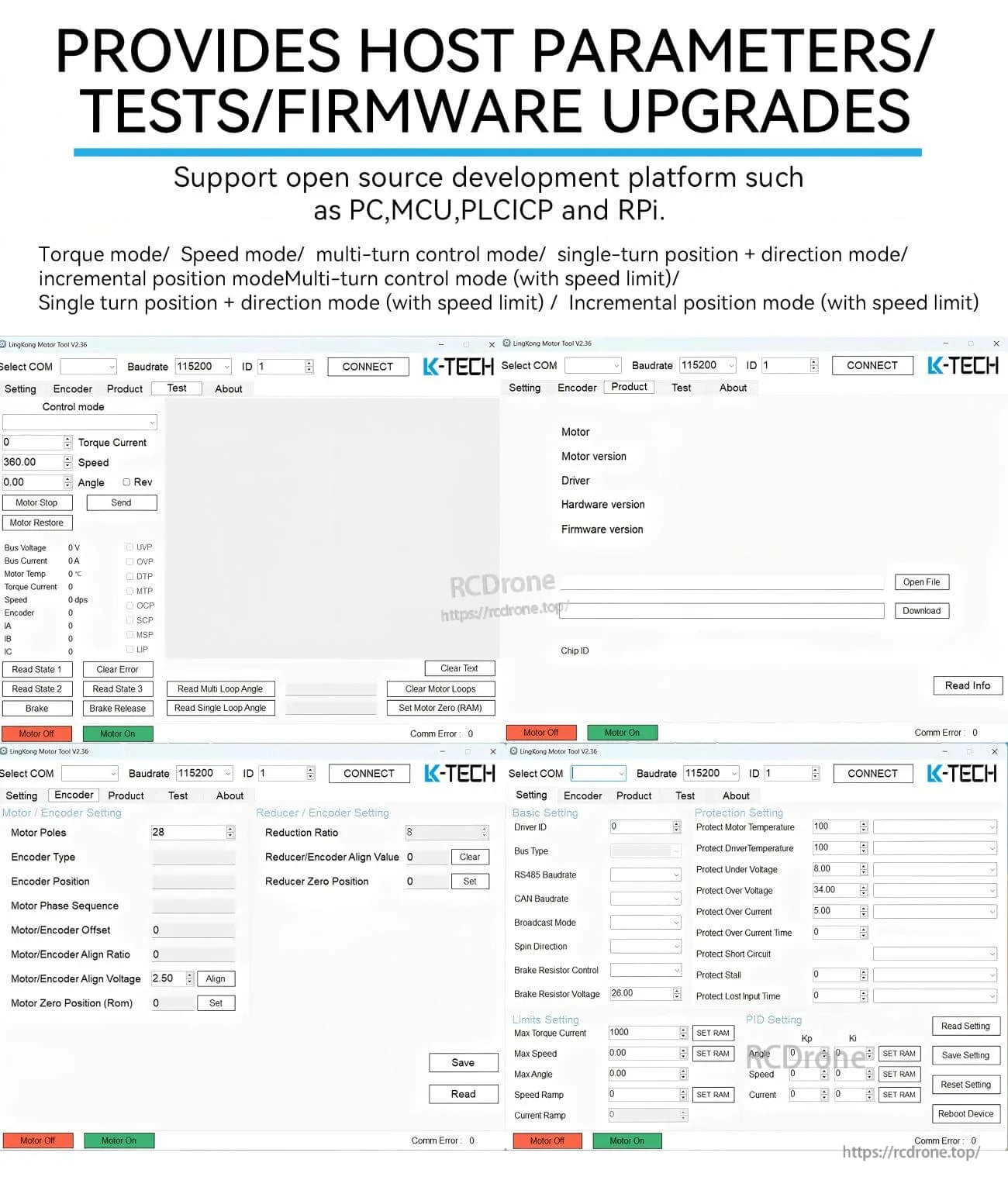
El control de freno incorporado y múltiples modos de operación ayudan a ajustar el comportamiento para diferentes tareas de control de movimiento y requisitos de seguridad.
Related Collections




