




Motor LKMTECH MG4010E-i36B-V3 24V 1:36 Motor Planetario con Freno, RS485/CAN, Encoder Magnético
Motor LKMTECH MG4010E-i36B-V3 24V 1:36 Motor Planetario con Freno, RS485/CAN, Encoder Magnético
LKMTECH
No se pudo cargar la disponibilidad de retiro
Resumen
El LKMTECH MG4010E-i36B-V3 Motor es un motor de engranaje planetario con freno integrado y retroalimentación de encoder, diseñado para la actuación en robótica donde se requiere un control preciso de torque/velocidad/posición y una integración compacta. Soporta comunicación RS485 o CAN y está especificado con un reductor PG4210 (1:36) y un encoder magnético dual (motor de 18 bits + reductor de 14 bits).
Características Clave
- Reductor planetario: PG4210, relación de reducción 1:36, retroceso ≤12 arcmin
- Encoder: encoder magnético de 18 bits (motor) + 14 bits (reductor)
- Comunicación: RS485 o CAN
- Bucles de control: Bucle de Torque (32KHz) / Bucle de Velocidad (8KHz) / Bucle de Posición (4KHz)
- Curva de aceleración: Aceleración trapezoidal
- Freno: BG4906, torque de freno 0.6N.m
- Temperatura del motor: SÍ
Especificaciones técnicas
| Nombre del artículo | MG4010E-i36B-V3 |
| Tensión nominal | 24V |
| Velocidad máxima | 90RPM |
| Velocidad nominal | 77RPM |
| Par nominal | 6N.m |
| Par máximo | 13N.m |
| Corriente nominal | 2.4A |
| Potencia máxima | 132W |
| Constante de velocidad | 3rpm/V |
| Constante de par | 2.58N.m/A |
| Vueltas | 14 |
| Tipo de bobinado | Y |
| Resistencia de fase | 0.68Ω |
| Inductancia de fase | 0.25mH |
| Polos del motor | 28 |
| Inercia del rotor | 158gcm² |
| Temperatura del motor | SÍ |
| Tipo de reductor | PG4210 |
| Relación de reducción | 1:36 |
| Juego | ≤12 arcmin |
| Carga nominal del rodamiento | 1120N |
| Peso del motor | 542.5g |
| Tipo de freno | BG4906 |
| Par de freno (N.m) | 0.6N.m |
| Tensión de arranque (V) | 24V |
| Tensión de mantenimiento (V) | 7V |
| Poder de mantenimiento (W) | 1.4W |
| Recomendar controlador | DG40E |
| Tensión de entrada del controlador | 7.4-32V |
| Comunicación | RS485 O CAN |
| Frecuencia de Comunicación | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | Encoder Magnético de 18bit(motor)+14bit(reductor) |
| Tasa de Baud del Encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Tasa de Baud (CAN) | 100K, 125K, 250K, 500K, 1M |
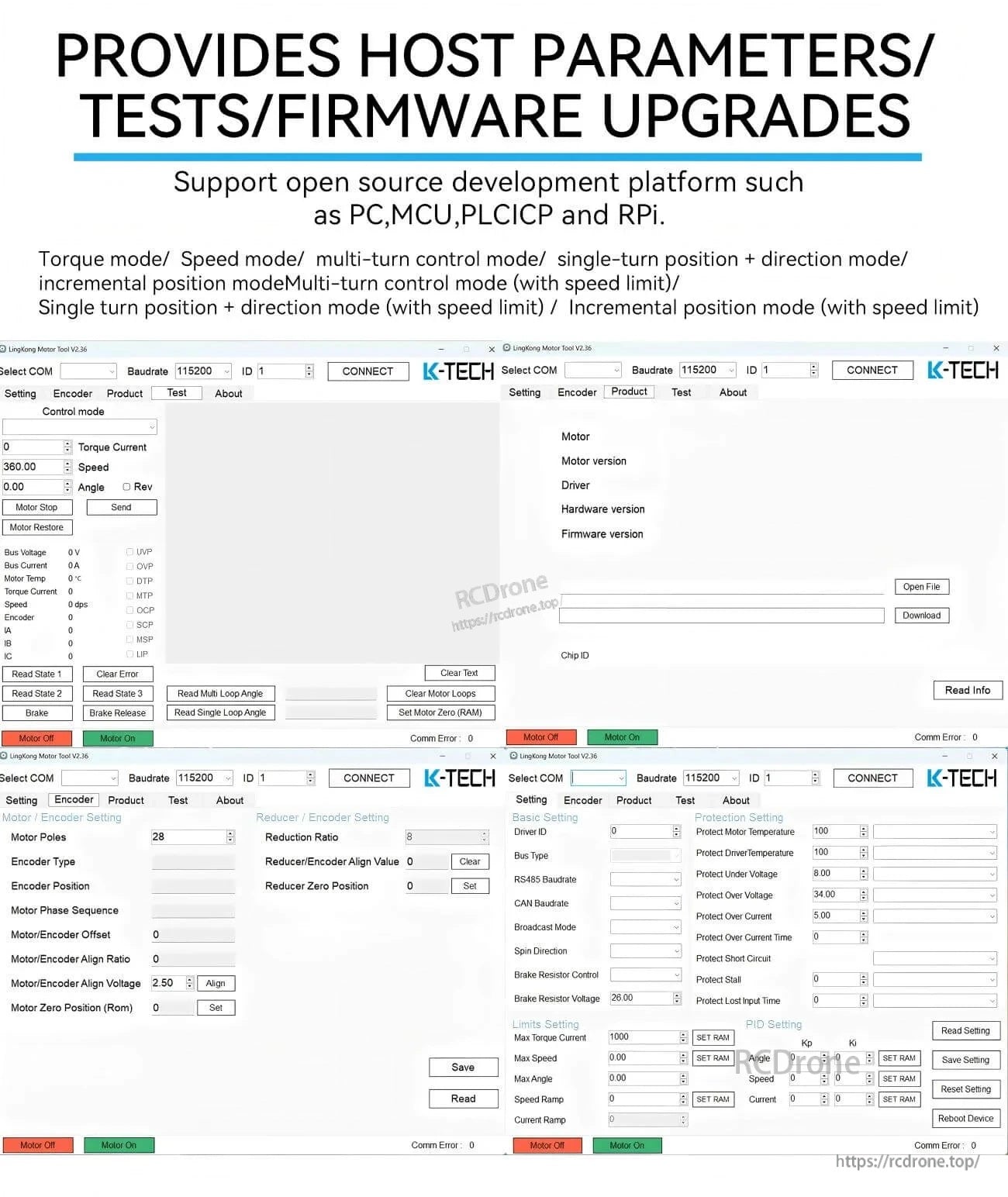
| Modo de Control | Bucle de Torque(32KHz)/Bucle de Velocidad(8KHz)/Bucle de Posición(4KHz) |
| Curva de Aceleración | Aceleración Trapezoidal |
Definición de Interfaz (Puertos)
Significados de los puertos mostrados para esta serie de motores:
- A/H: RS485-A o CAN-H
- B/L: RS485-B o CAN-L
- V-: Fuente de Alimentación Negativa
- V+: Fuente de Alimentación Positiva
- T: Transmisor UART
- R: Receptor UART
- G: GND de señal
- Interruptor ID
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos
- Vehículos AGV
- Robots ARU
Manuales / Documentos
Para soporte de integración y verificación de compatibilidad previa a la venta, contacta [email protected] or visita https://rcdrone.top/.
Detalles

El cuerpo compacto del motorreductor planetario integra el freno y la interfaz a bordo en un solo actuador paquete.
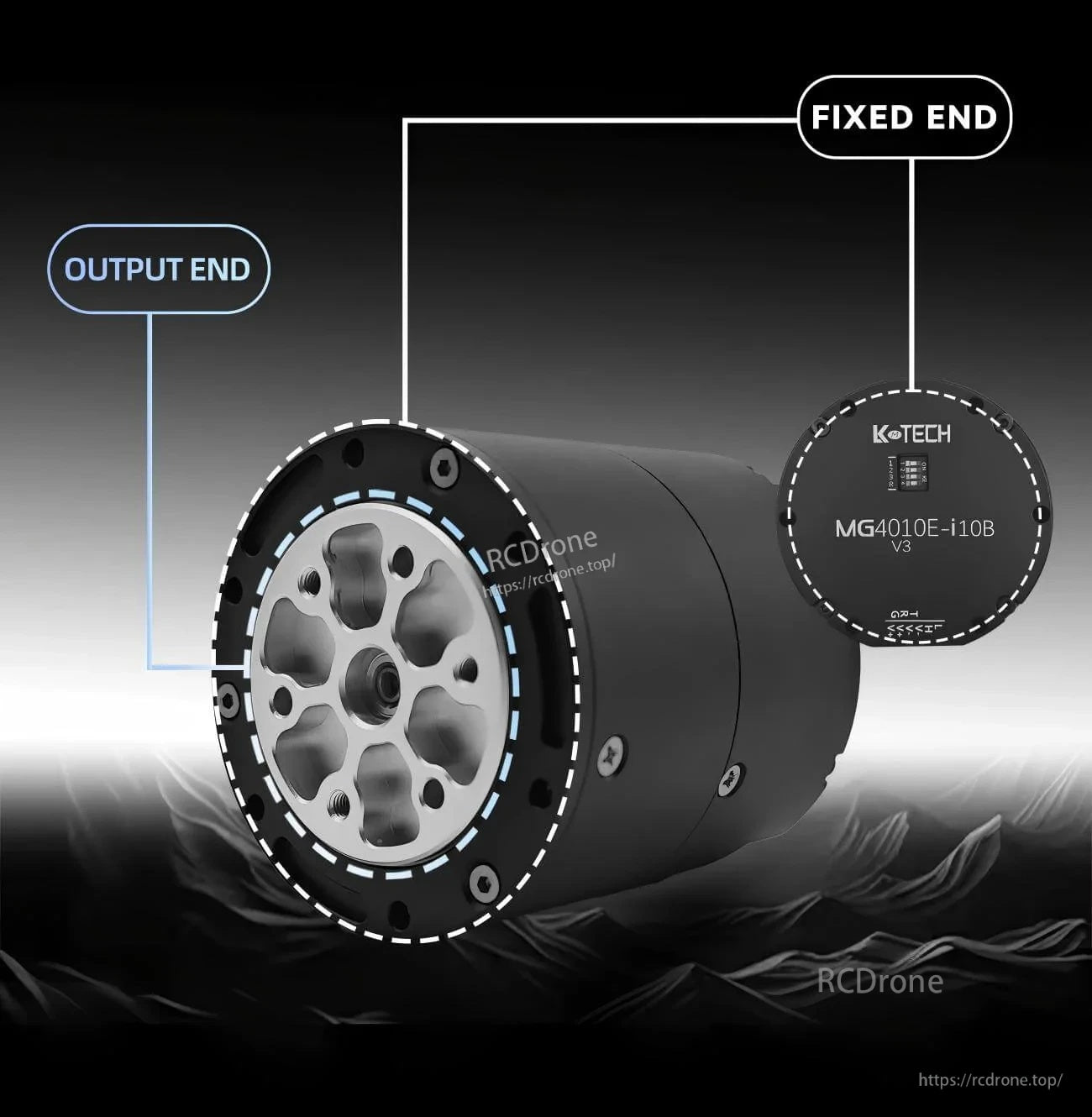
Un extremo de salida claramente definido y un extremo fijo ayudan a simplificar la integración mecánica y la alineación en los ensamblajes.

La retroalimentación del encoder y la comunicación por bus soportan un control estable de torque, velocidad y posición para las juntas robóticas.
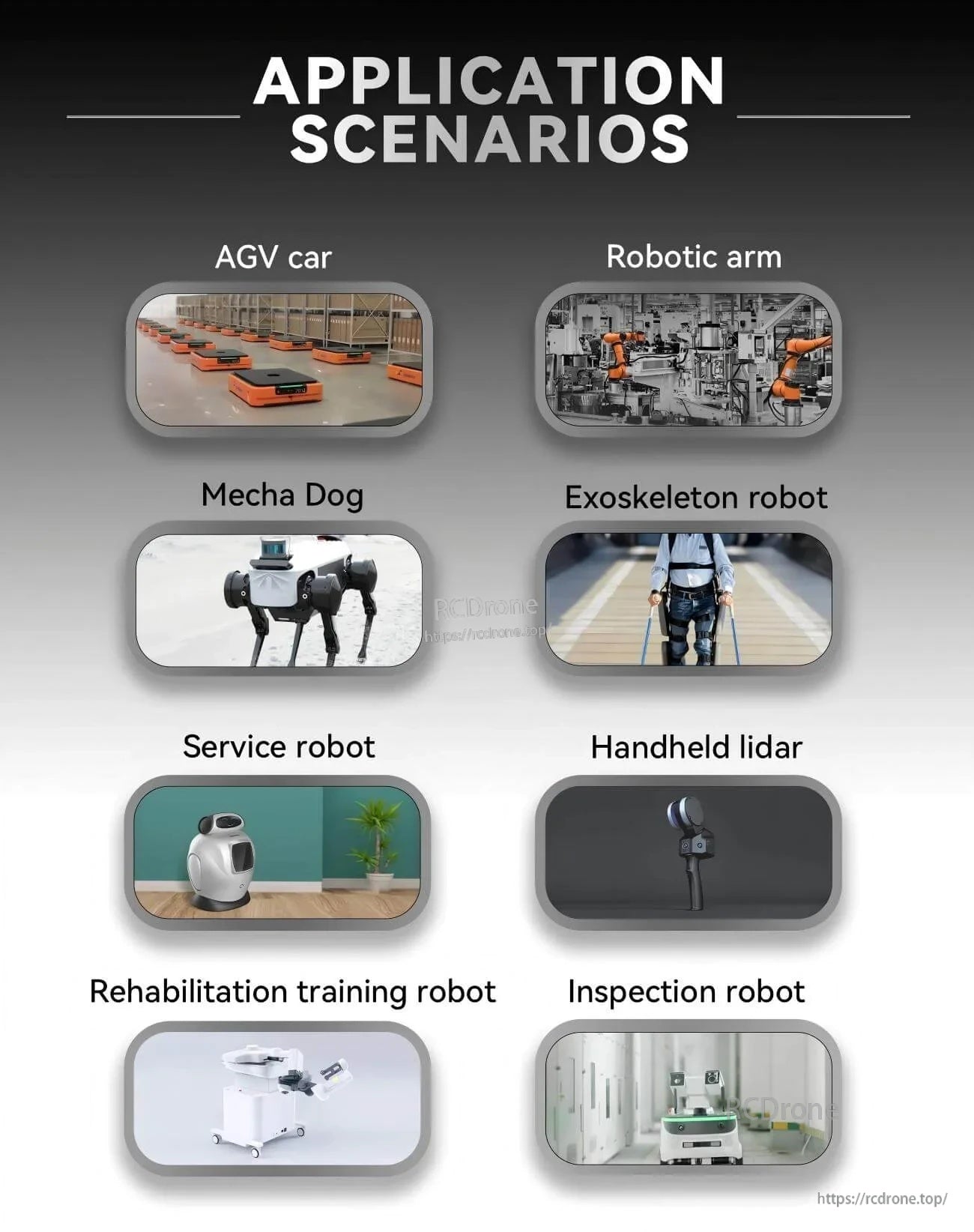
Diseñado para tareas de actuación robótica desde AGVs y brazos robóticos hasta robots bípedos y sistemas de exoesqueleto.
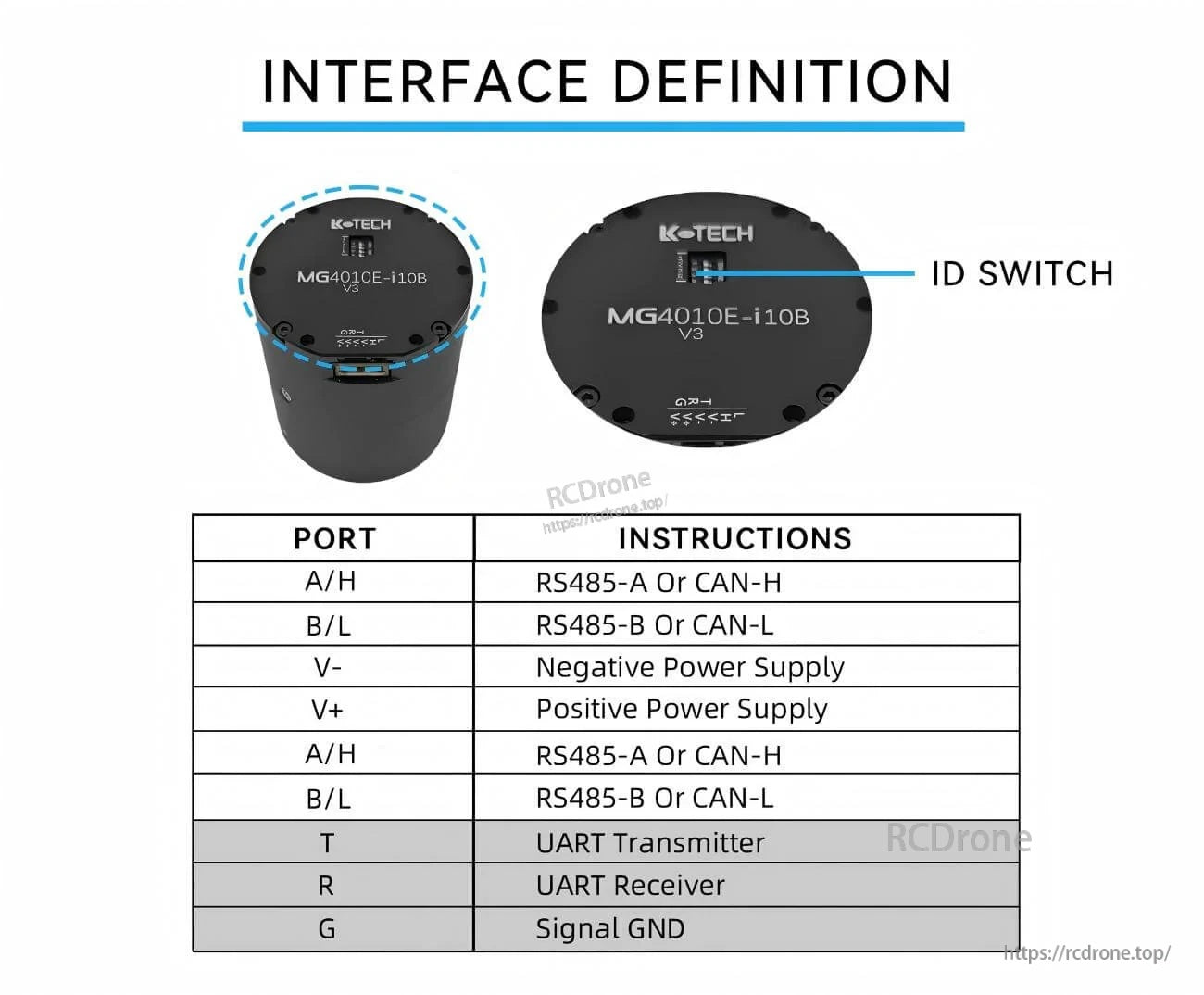
Las definiciones de puerto cubren alimentación, cableado RS485/CAN y pines UART, con un interruptor de ID a bordo para direccionamiento.

Related Collections




