




Motor LKMTECH MG5010E-i10-V3 24V 160W Reductor Planetario 1:10, RS485/CAN, Codificador de 18 bits
Motor LKMTECH MG5010E-i10-V3 24V 160W Reductor Planetario 1:10, RS485/CAN, Codificador de 18 bits
LKMTECH
No se pudo cargar la disponibilidad de retiro
Resumen
El LKMTECH MG5010E-i10-V3 Motor es un motor sin escobillas con un reductor de engranaje planetario y un encoder integrado para aplicaciones de robótica y control de movimiento. Está especificado para operación a 24V y soporta comunicación RS485 o CAN cuando se utiliza con el controlador recomendado.
Características clave
- Motor sin escobillas de alta potencia + reductor de engranaje planetario de alta precisión
- Par nominal 4 N.m; par máximo 7 N.m
- Relación de reducción 1:10 (Tipo de reductor: PG5110)
- Encoder magnético de 18 bits (lado del motor)
- Opciones de comunicación: RS485 o CAN (con controlador recomendado DG40E)
- Temperatura del motor: SÍ
- Interfaz de sensor de temperatura dual para monitoreo en tiempo real de la temperatura del motor y del controlador
- Aspectos destacados del controlador mostrados: voltaje de entrada 7.4-32V; comunicación RS485 o bus CAN; codificadores duales con memoria de punto cero después de apagar
Especificaciones
| Nombre del artículo | MG5010E-i10-V3 |
| Voltaje nominal | 24V |
| Velocidad máxima | 320RPM |
| Velocidad nominal | 235RPM |
| Par nominal | 4 N.m |
| Par máximo | 7 N.m |
| Corriente nominal | 4.4A |
| Poder máximo | 160W |
| Constante de velocidad | 97.9 rpm/V |
| Constante de par | 0.1 N.m/A |
| Vueltas | 13 |
| Tipo de bobinado | Y |
| Resistencia de fase | 0.466Ω |
| Inductancia de fase | 0.26mH |
| Polos del motor | 28 |
| Inercia del rotor | 850 gcm² |
| Temperatura del motor | SÍ |
| Tipo de reductor | PG5110 |
| Relación de reducción | 1:10 |
| Juego | 6 arcmin (también listado como ≤8 arcmin) |
| Carga nominal del rodamiento | 1000N |
| Peso del motor | 420g |
| Tamaño | Φ63*41.5 |
| Recomendación de accionamiento | DG40E |
| Tensión de entrada del accionamiento | 7.4-32V |
| Comunicación | RS485 O CAN |
| Frecuencia de Comunicación | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| Encoder | Encoder Magnético de 18 bits |
| Baudrate del Encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 1M |
| Modo de Control | Bucle de Torque (32KHz) / Bucle de Velocidad (8KHz) / Bucle de Posición (4KHz) |
| Curva de Aceleración | Aceleración Trapezoidal |
Definición de Interfaz
| Interfaz | Nota |
|---|---|
| A/H | RS485-A o CAN-H |
| B/L | RS485-B o CAN-L |
| V- | Fuente de Alimentación Negativa |
| V+ | Fuente de alimentación positiva |
| A/H | RS485-A o CAN-H |
| B/L | RS485-B o CAN-L |
| T | Transmisor UART |
| R | Receptor UART |
| G | GND de señal |
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos / robots portátiles
- Robots cuadrúpedos / plataformas de perros robot
- Vehículos AGV / coche AGV
- Robots ARU
Para orientación en la selección y soporte de integración, contacte https://rcdrone.top/ o envíe un correo electrónico a [email protected].
Manuales
Detalles

MG5010E-i10-V3 integra un motor sin escobillas y una caja de engranajes planetaria en un actuador compacto para robótica y control de movimiento.

Un reductor de engranajes planetario 1:10 ayuda a proporcionar un mayor par y estabilidad de posicionamiento para construcciones de articulaciones y tracción de ruedas.


Un encoder magnético de 18 bits en el lado del motor soporta retroalimentación precisa; algunas configuraciones también utilizan un encoder auxiliar en el lado del reductor.
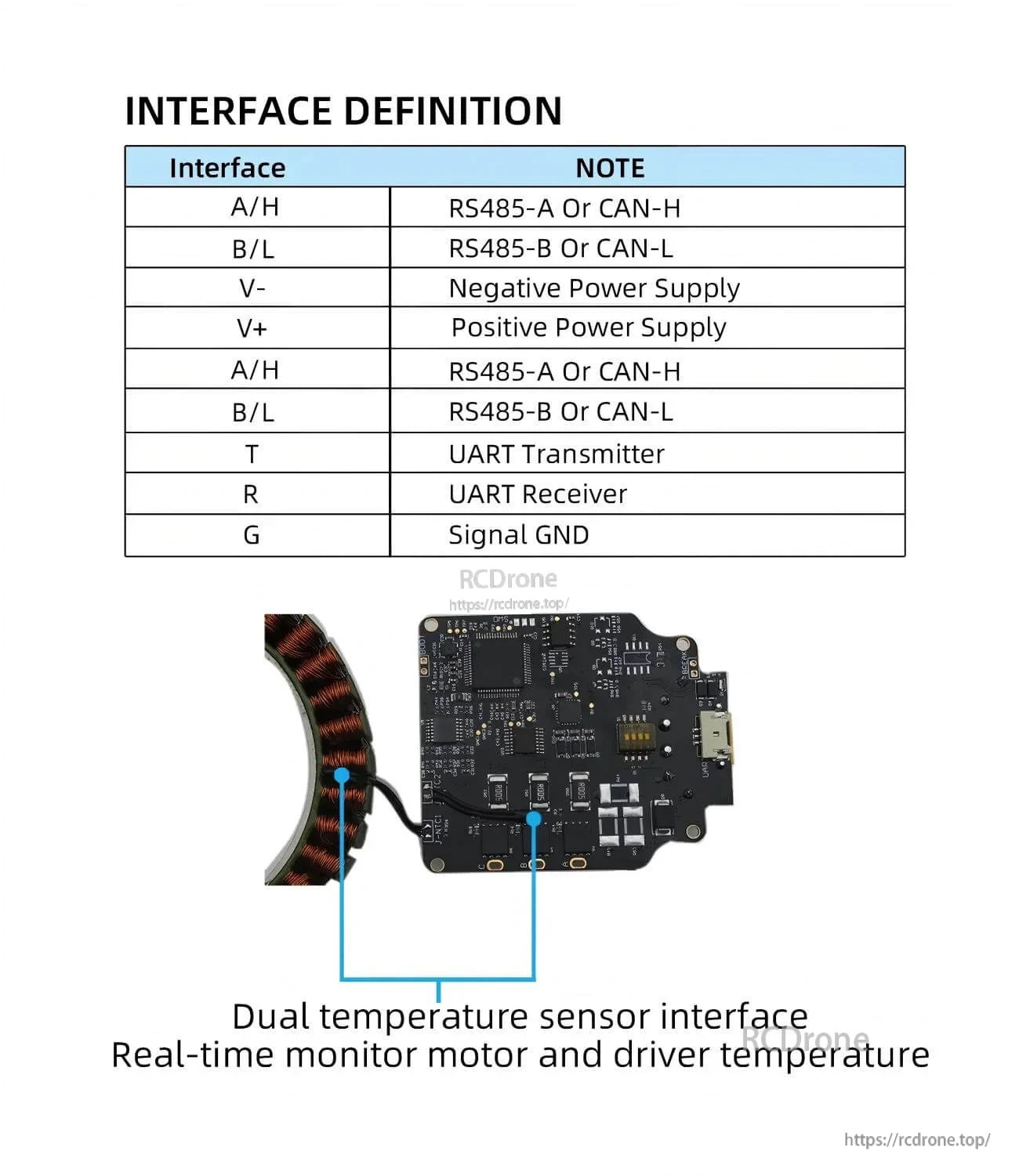
Definiciones de pines claras y entradas de sensores de temperatura duales simplifican el cableado y permiten el monitoreo térmico en tiempo real del motor/controlador.
Suitable for platforms such as AGVs, robotic arms, quadrupeds, and wearable robots where compact torque is needed.





- Al seleccionar una opción, se actualiza toda la página.
- Se abre en una nueva ventana.