




Motor LKMTECH MHF6015-V3 24V 872RPM 3N.m Codificador Magnético 19bit RS485/CAN para Robótica
Motor LKMTECH MHF6015-V3 24V 872RPM 3N.m Codificador Magnético 19bit RS485/CAN para Robótica
LKMTECH
No se pudo cargar la disponibilidad de retiro
Resumen
El LKMTECH motor MHF6015-V3 es un motor sin escobillas de 24V con un encoder magnético de 19 bits y comunicación RS485 o CAN, diseñado para aplicaciones de movimiento robótico como robots humanoides, brazos robóticos, exoesqueletos y vehículos AGV.
Características clave
- Diseño integrado: placa de control incorporada, MCU de alto rendimiento, ajuste de parámetros del host, pequeño volumen y gran torque, encoder de valor absoluto de alta precisión.
- Diseño hueco; tamaño hueco marcado como 12.7 mm (12.6 mm mostrado dentro de la llamada hueca).
- Funciona sin problemas; certificación CE (como se indica).
- Declaración de materiales del núcleo: “El material del núcleo del motor es chapa de acero silicio de alta calidad y un imán permanente de alta temperatura y fuerte magnetismo.”
- Declaración del rotor externo: “El diseño plano de múltiples etapas del rotor externo proporciona un mayor torque y es adecuado para aplicaciones relacionadas con el espacio.”
- Declaración de rodamientos: “Estructura sin escobillas con rodamientos de alto rendimiento para una rotación más suave y una vida útil más larga.”
- Declaración de muestreo/control de corriente: “Muestreo de resistencia de aleación blanqueada de alta precisión y baja temperatura, control de corriente preciso.”
- Declaración de accionamiento: “Accionamiento de puente completo de tres fases con tubo N completo, baja resistencia interna, alta corriente.”
- Declaración de control: “Bucle cerrado de par, modo de control de velocidad y posición que se puede cambiar arbitrariamente.”
- Declaración de parámetros/pruebas/actualizaciones de firmware del host; soporta plataformas de desarrollo de código abierto como PC, MCU, PLC, ICP y RPi.
- Declaración de modos: Modo de par / Modo de velocidad / modo de control de múltiples vueltas / modo de posición + dirección de una sola vuelta / modo de posición incremental; modo de control de múltiples vueltas (con límite de velocidad) / modo de posición + dirección de una sola vuelta (con límite de velocidad) / modo de posición incremental (con límite de velocidad).
Especificaciones
| Nombre del artículo | MHF6015-V3 |
| Giros | 25 |
| Voltaje nominal | 24V |
| Velocidad máxima | 872RPM |
| Par nominal | 0.82N.m |
| Velocidad nominal | 560RPM |
| Corriente nominal | 3.1A |
| Potencia máxima | 57W |
| Par máximo | 3N.m |
| Constante de velocidad | 23.3rpm/V |
| Constante de par | 0.26N.m/A |
| Tipo de bobinado | Y |
| Resistencia de fase | 2.17Ω |
| Inductancia de fase | 1.44mH |
| Polos del motor | 28 |
| Inercia del rotor | 515gcm² |
| Temperatura del motor | SÍ |
| Carga nominal del rodamiento | 280N |
| Peso del motor | 251g |
| Recomendación de conducción | DHF50 |
| Tensión de entrada del controlador | 7.4-32V |
| Comunicación | RS485 O CAN |
| Frecuencia de Comunicación | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | Encoder Magnético de 19 bits |
| Tasa de Baud del Encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Tasa de Baud (CAN) | 100K, 125K, 250K, 500K, 1M |
| Modo de Control | Bucle de Torque (24KHz)/Bucle de Velocidad (8KHz)/Bucle de Posición (8KHz) |
| Curva de Aceleración | Aceleración Trapezoidal |
Para orientación en la selección o soporte de integración, comuníquese con el equipo de servicio al cliente en https://rcdrone.top/ o envíe un correo electrónico a [email protected].
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos / robot exoesqueleto
- Robots cuadrúpedos / perro mecánico
- Vehículos AGV / coche AGV
- Robots ARU
- Robot de servicio
- Lidar portátil
- Robot de entrenamiento de rehabilitación
- Robot de inspección
Manuales / Documentos
Detalles

Un formato de motor integrado compacto servo mantiene el cableado y el ensamblaje simples para las articulaciones robóticas.
Una placa de control integrada y MCU soportan la sintonización de parámetros desde el host para una puesta en marcha más fácil.
 El diseño de eje hueco (bore de 12.7 mm) ayuda a enrutar cables o ejes a través del motor para construcciones más limpias.
El diseño de eje hueco (bore de 12.7 mm) ayuda a enrutar cables o ejes a través del motor para construcciones más limpias.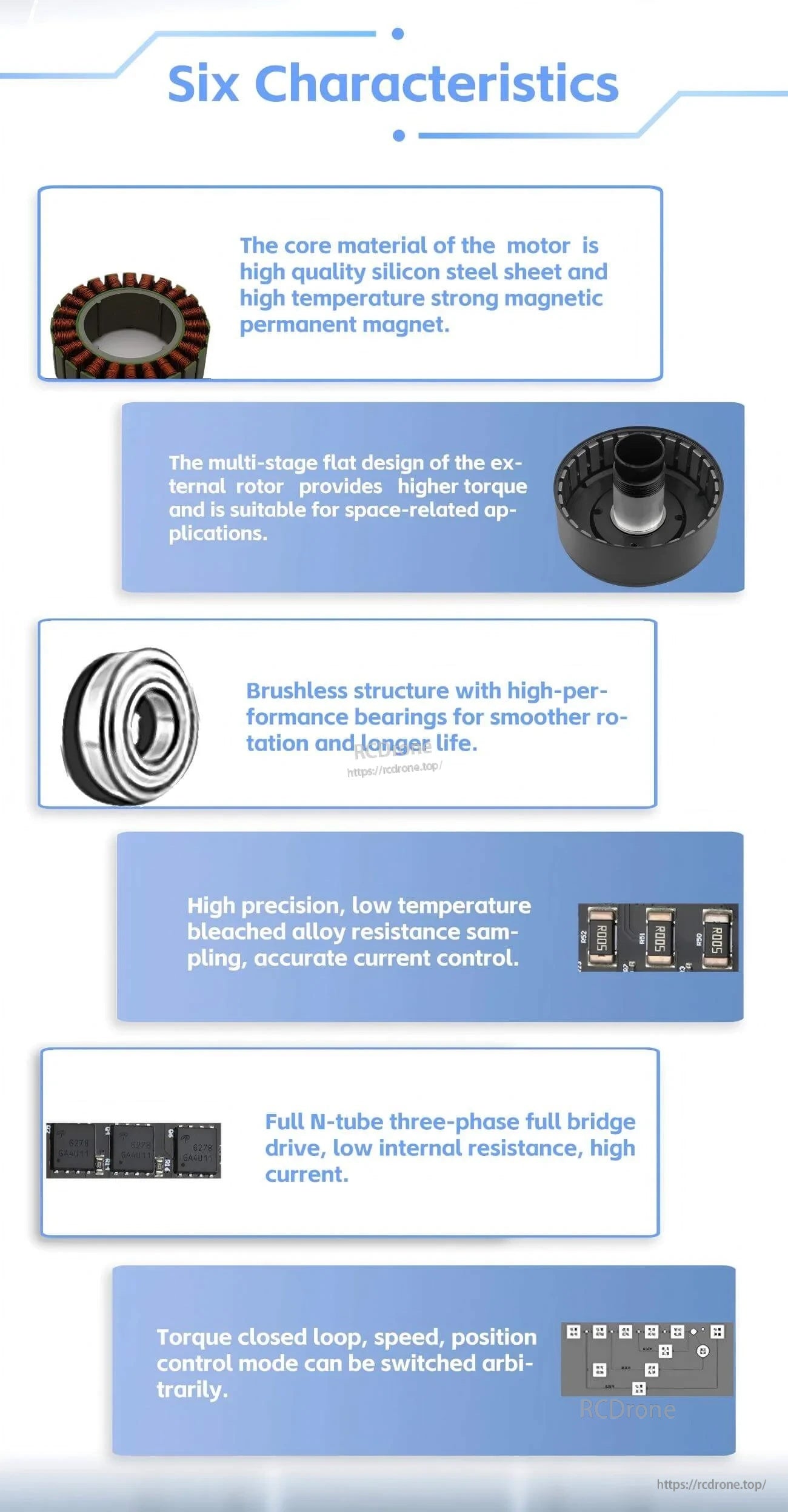
Las notas clave de diseño cubren materiales, estructura de par de rotor externo, rodamientos y capacidades de control en bucle cerrado.
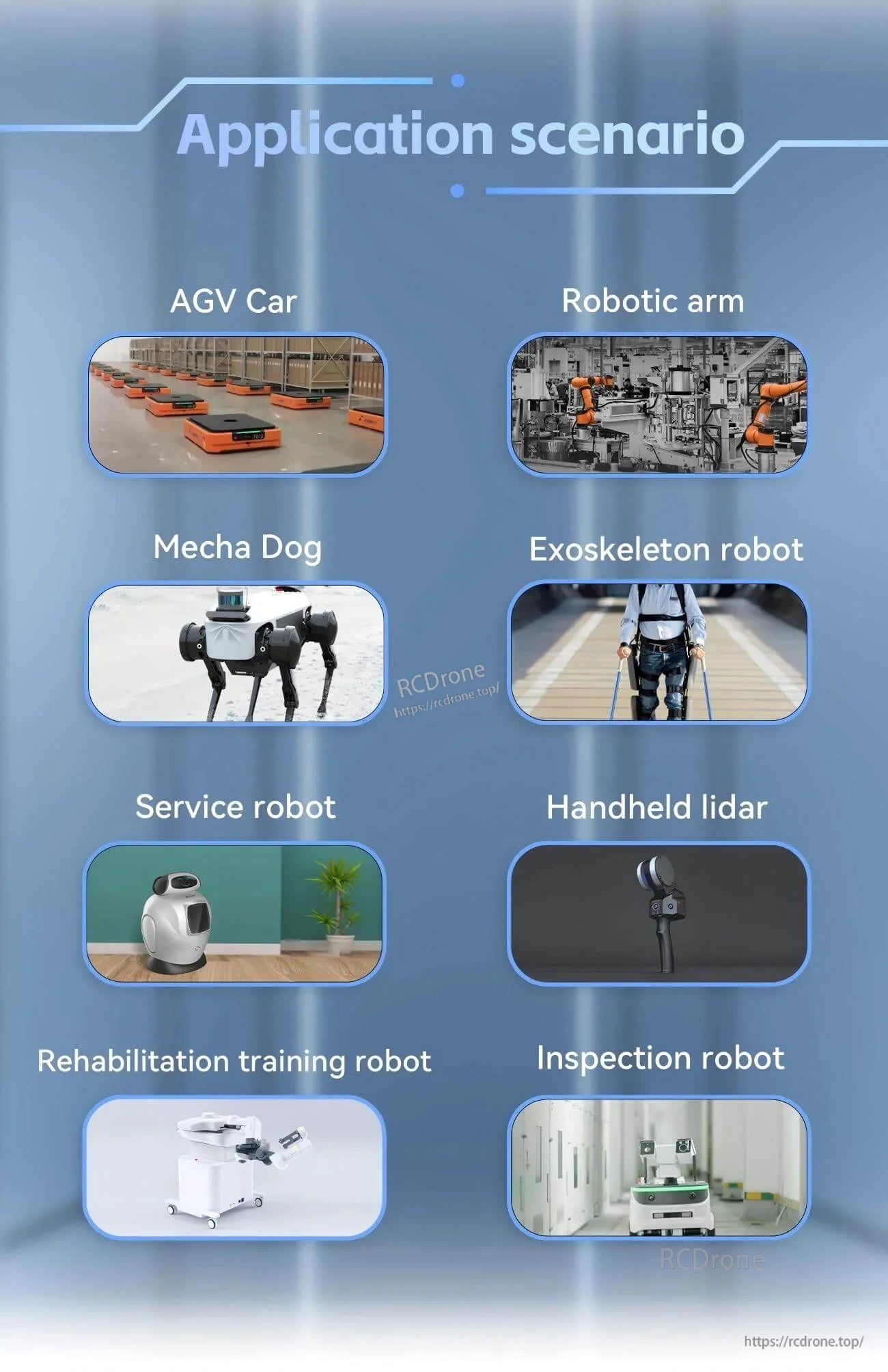
Diseñado para tareas de movimiento en robótica como AGVs, brazos robóticos, cuadrúpedos, exoesqueletos y robots de servicio.
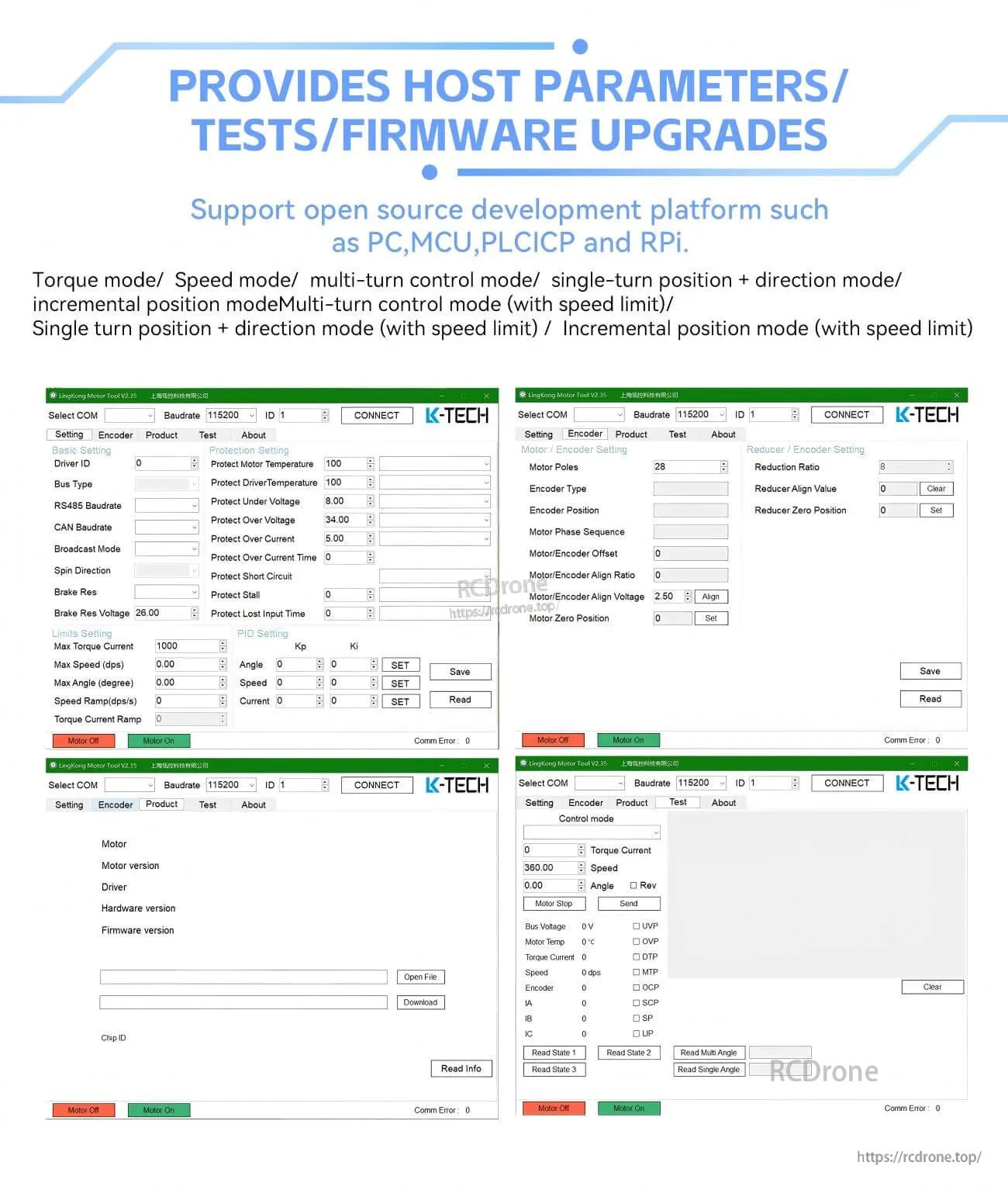
Las páginas de software para PC ilustran la configuración de parámetros, funciones de prueba y soporte para actualización de firmware.

Related Collections




