Mad AMPX 300A (12-24S) HV Drone ESC
Mad AMPX 300A (12-24S) HV Drone ESC
MAD
No se pudo cargar la disponibilidad de retiro
Descripción del producto del ESC para dron MAD AMPX 300A (12–24S) HV
El MAD AMPX 300A (12–24S) HV Drone ESC es un controlador electrónico de velocidad de alto rendimiento diseñado para aplicaciones exigentes como drones de carga pesada, paramotores eléctricos y otros sistemas aéreos o industriales de alta potencia. Admite un amplio rango de voltaje de 12S a 24S (aproximadamente de 40 V a 100 V) y proporciona una corriente continua de hasta 300 A, lo que garantiza una propulsión potente y fiable en condiciones de carga extremas. Sus múltiples características de protección y su clasificación IPX4 lo hacen ideal para entornos profesionales e industriales donde la seguridad, la eficiencia y la durabilidad son primordiales.
Características principales
• Alta capacidad de corriente
Admite una corriente continua de 300 A, lo que lo hace adecuado para operaciones de elevación pesada y gran empuje.
• Amplio rango de voltaje
Funciona de manera eficiente de 12S a 24S (40–100 V) y se adapta a distintas configuraciones de batería.
• Protección IPX4
Ofrece protección contra salpicaduras de agua y polvo, lo que garantiza un rendimiento confiable en condiciones exteriores difíciles.
• Control y protección avanzados
Integra protección contra sobretensión, subtensión, sobrecorriente y cortocircuito. Las versiones 2.0 y 3.0 incluyen mecanismos de protección de tensión mejorados; la versión 3.0 también incorpora una función de freno para aplicaciones de paramotor.
• Opciones de señal flexibles
Dependiendo de la versión, admite entrada PWM estándar o comunicación CAN para monitoreo en tiempo real y ajustes de parámetros.
• Diseño de refrigeración optimizado
Cuenta con una estructura de disipador de calor robusta y una carcasa de aluminio para mantener un rendimiento estable bajo cargas elevadas continuas.
Información de la versión
• Versión 1.0 – Versión básica solo con control PWM, sin comunicación CAN ni BEC.
• Versión 2.0 Incluye comunicación CAN y un BEC integrado. Diseñado para drones, con firmware optimizado para plataformas aéreas. Cuenta con un mecanismo avanzado de protección contra voltaje.
• Versión 3.0 Diseñado para aplicaciones de paramotor eléctrico, con comunicación CAN, firmware específico para paramotor, función de freno y compatibilidad con cajas de configuración de parapentes motorizados. Incorpora un sistema de protección de voltaje especializado para cumplir con los requisitos de seguridad del vuelo en paramotor.
Motor y hélice recomendados
El ESC AMPX 300A funciona excepcionalmente bien con el motor M40C30 pro IPE de 43 kV, especialmente al combinarse con una hélice de fibra de carbono brillante de 120 × 44 cm. Esta combinación proporciona un alto empuje, un funcionamiento suave y un uso eficiente de la energía para configuraciones de drones o paramotores a gran escala.
Especificaciones técnicas
| Parámetro | Detalles |
|---|---|
| Modelo | Variador de voltaje de alta tensión AMPX 300A |
| Recuento de celdas LiPo admitidas | 12–24S (40–100 V) |
| Corriente continua | 300 A |
| Límite de pico/corriente | 300 A |
| Nivel de protección | IPX4 |
| Señal de entrada | PWM (50–400 Hz) o CAN (dependiendo de la versión) |
| Salida BEC | Disponible en V2.0 (no en V1.0) |
| Función de freno | Incluido en V3.0 (firmware de paramotor) |
| Dimensiones (aprox.) | 84 mm × 63 mm × 45 mm |
| Longitud del cable de señal | 400 milímetros |
| Principales funciones de protección | Sobrecorriente, cortocircuito, sobretensión, subtensión, sobretemperatura |
Instrucciones de instalación y uso
Asegúrese de que la polaridad sea correcta y utilice cables aptos para alta corriente. En las unidades V2.0 o V3.0, conecte las líneas CAN correctamente si utiliza funciones de comunicación avanzadas. Proporcione suficiente espacio de ventilación o refrigeración alrededor del ESC y móntelo firmemente para minimizar las vibraciones. Al realizar la primera prueba, comience con una carga mínima para verificar la rotación del motor, el comportamiento de la temperatura y las funciones de protección antes de aplicar la carga operativa completa. Inspeccione periódicamente todas las conexiones, cables y herrajes de montaje.
Problemas comunes y solución de problemas
• El motor no arranca
– Verifique el voltaje de la batería, el cableado del ESC y la salida de la señal del controlador de vuelo.
• Vibración o tartamudeo del motor
– Confirme que el cableado de fase del motor y el mapeo del motor del controlador de vuelo sean correctos.
• Sobrecalentamiento o apagado
– Asegúrese de que haya una refrigeración adecuada y confirme que las especificaciones del motor/hélice coincidan con los requisitos de carga de la aplicación.
• Alarma de bajo voltaje
– Verifique la capacidad de la batería y la clasificación de descarga; recargue o reemplace la batería si es necesario.
Seguridad y descargo de responsabilidad
Operar conforme a la normativa local sobre drones de alta potencia o vuelos de paramotor. Mantener una distancia segura de personas y bienes, y realizar comprobaciones periódicas del sistema. Cualquier modificación o el uso de piezas no originales puede conllevar riesgos imprevistos. Seguir siempre las instrucciones del fabricante y asegurarse de que todos los componentes estén bien fijados.
Escenarios aplicables
Este ESC es ideal para aplicaciones de drones a gran escala que requieren gran capacidad de carga útil, vuelos de larga duración u operaciones a gran altitud. También destaca en configuraciones de paramotor eléctrico (especialmente con el firmware V3.0), robots industriales, vehículos especiales y otros sistemas de propulsión eléctrica de alta potencia.
Conclusión
El ESC para drones MAD AMPX 300A (12–24S) HV combina una construcción robusta, alta capacidad de corriente y opciones de comunicación flexibles en una solución única y versátil. Con tres versiones adaptadas a diferentes necesidades de control y protección de voltaje, ofrece una gestión de energía fiable y funciones avanzadas como frenado (V3.0) y BEC integrado (V2.0). Tanto en drones de carga pesada como en sistemas de paramotor, el AMPX 300A ofrece el rendimiento y la seguridad que requieren los profesionales en los entornos de vuelo y propulsión más exigentes.

El AMPX 300AV2 ofrece funciones de protección múltiple, compatible con control de aceleración dual y comunicación CAN en tiempo real. Ofrece ajustes de cortocircuito, pérdida de aceleración, voltaje, temperatura, protección contra pérdida de aceleración, protección de arranque y calibración de la aceleración. El diagrama de conexión del ESC incluye detalles del motor, la batería y el cable de señal para una integración perfecta.
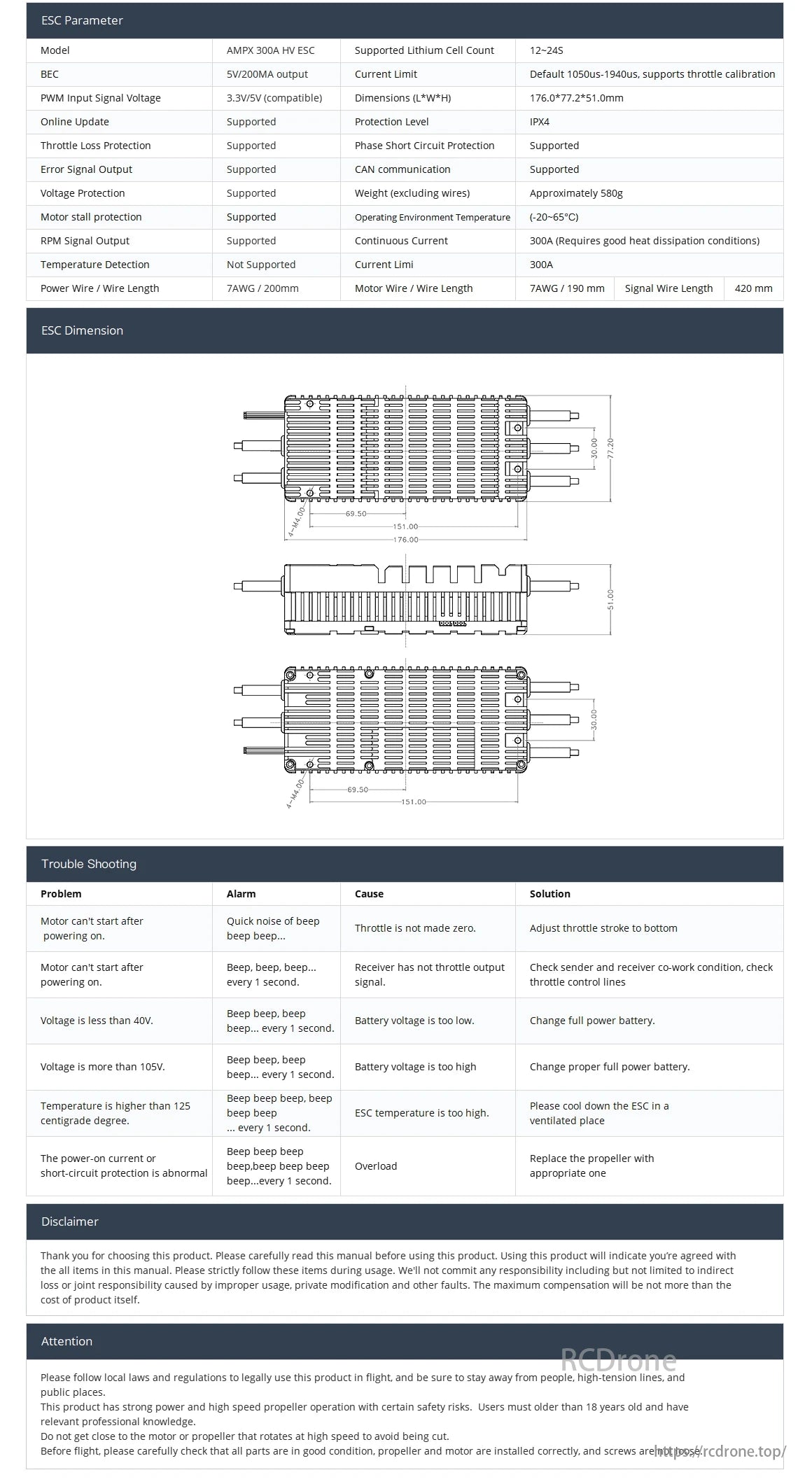
El ESC AMPX 300A HV admite celdas de litio de 12-24S, con un límite de corriente predeterminado de 1050 us-1940 us. Cuenta con salida BEC, entrada PWM, actualizaciones en línea y diversas protecciones. Dimensiones: 176,0 x 77,2 x 51,0 mm y un peso aproximado de 580 g. La temperatura de funcionamiento oscila entre -20 °C y 65 °C. La solución de problemas incluye problemas de arranque del motor, límites de voltaje y alertas de temperatura.
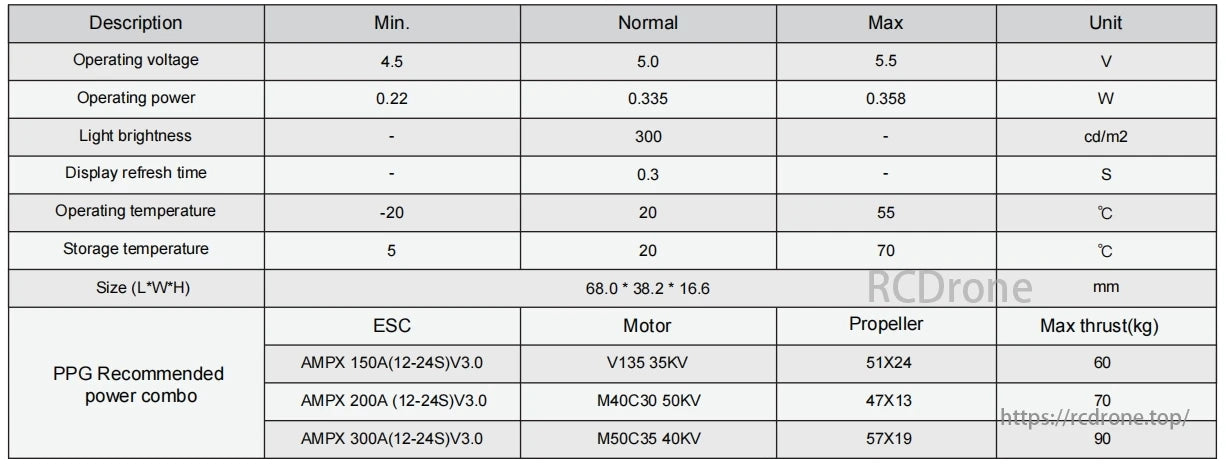
Voltaje de funcionamiento: 4,5-5,5 V, potencia: 0,22-0,358 W, brillo: 300 cd/m², tiempo de actualización: 0,3 s, temperatura de funcionamiento: -20 a 55 °C, temperatura de almacenamiento: 5 a 70 °C, tamaño: 68 x 38,2 x 16,6 mm.Las combinaciones recomendadas por PPG incluyen ESC, motores y hélices con un empuje máximo de hasta 90 kg.
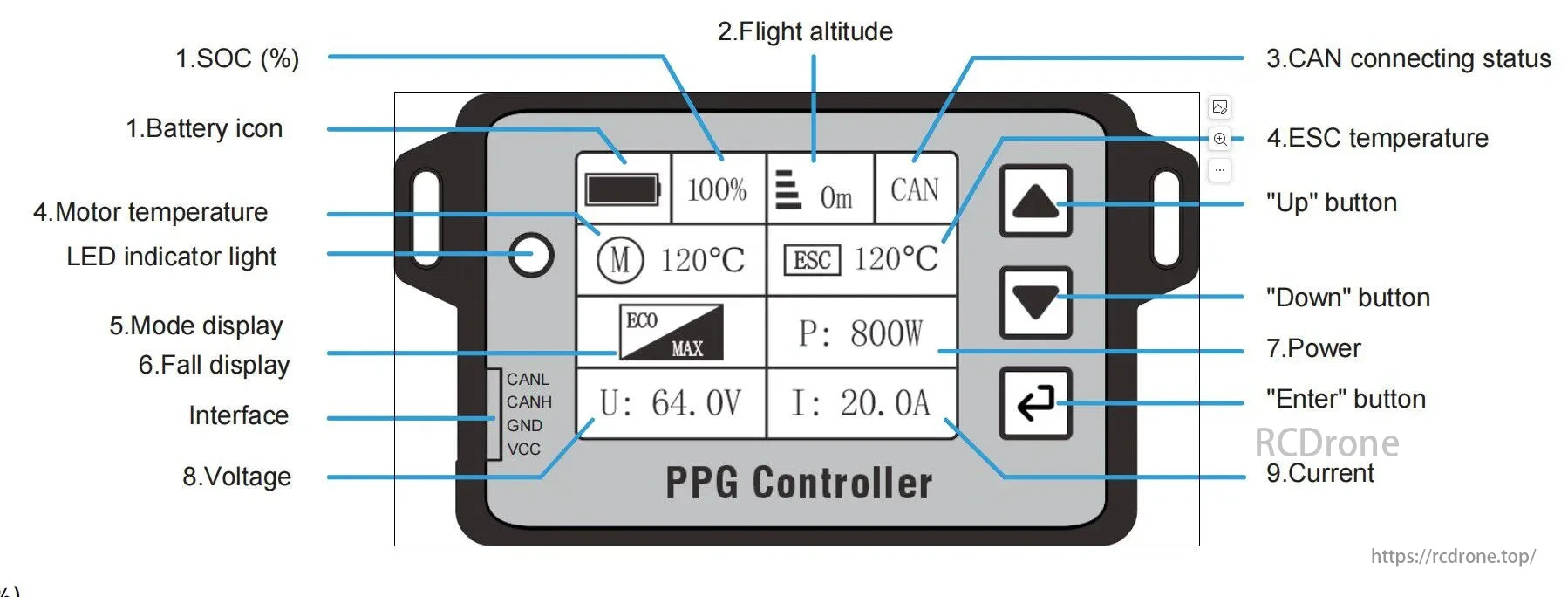
El controlador PPG muestra el estado de carga (SOC), la altitud de vuelo, el estado de CAN, las temperaturas del motor y ESC, el modo, la visualización de caída, el voltaje y la corriente. Incluye botones de subir, bajar, encender y Enter. La interfaz incluye conexiones CANL, CANH, GND y VCC.
Related Collections