Matek AP Periph Nodo CAN Placa Adaptadora CAN-G474 DroneCAN, STM32G474CE 512KB, CANFD 5Mbit/s
Matek AP Periph Nodo CAN Placa Adaptadora CAN-G474 DroneCAN, STM32G474CE 512KB, CANFD 5Mbit/s
MATEKSYS
No se pudo cargar la disponibilidad de retiro
Descripción general
Este nodo AP Periph CAN, el Matek nodo AP Periph CAN CAN-G474, es un nodo adaptador AP_Periph de ArduPilot diseñado para agregar periféricos a un bus DroneCAN utilizando un transceptor CAN de 5 Mbit/s y un MCU STM32G474. Permite la integración de sensores compatibles con ArduPilot y periféricos basados en GPIO (como salidas PWM y módulos de notificación LED) a través de DroneCAN.
Características clave
- Nodo adaptador basado en el firmware ArduPilot AP_Periph
- MCU STM32G474CE con 512KB de Flash
- Hardware compatible con CANFD con soporte CAN/CANFD de 1Mbit ~ 5Mbit
- 2x bus CAN
- 4x UARTs para GNSS, medidor de distancia, proximidad, EFI, entrada RC (receptor); MSP habilitado en TX3 por defecto para GNSS, brújula, barómetro a través de MSP
- 2x bus I2C para periféricos I2C (sensor de velocidad del aire, barómetro, brújula)
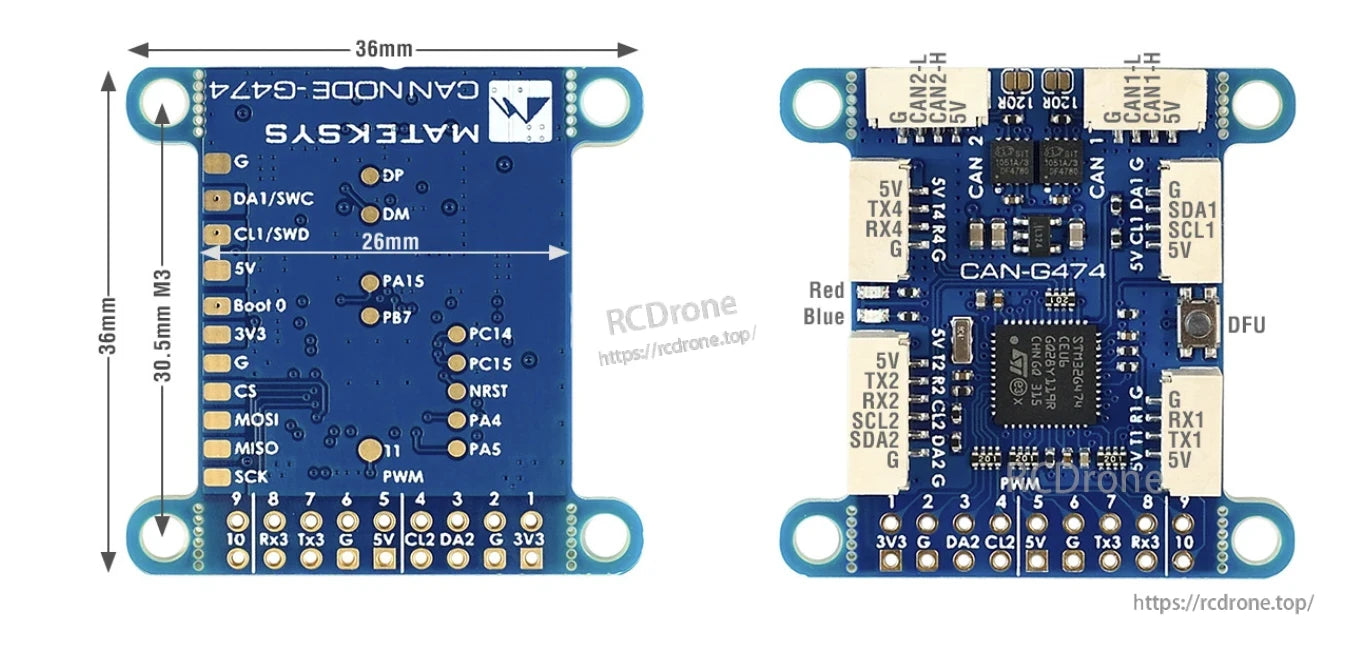
- 1x SPI para RM3100 (pads SPI en el lado inferior con serigrafía “CS, MOSI, MISO, SCK”)
- 11x salidas PWM para servos y ESC; todos los PWMs soportan DMA/DShot (PWM1-10 en DuPont 2.54mm agujeros; almohadilla PWM11 en el lado inferior con impresión de seda "11"
- Soporte de actualización de firmware a través de la herramienta GUI de DroneCAN / Mission Planner (pestaña DroneCAN) y a través del modo DFU de STM32CubeProgrammer (UART1)
Especificaciones
| MCU | STM32G474CE |
| Flash | 512KB |
| Tasa de datos del transceptor CAN | Hasta 5Mbit/s |
| Soporte CAN / CANFD | 1Mbit ~ 5Mbit CAN/CANFD |
| Bus CAN | 2x |
| UART | 4x (MSP habilitado en TX3 por defecto) |
| I2C | 2x |
| SPI | 1x (para RM3100) |
| Salidas PWM | 11x (PWM1-10 en DuPont 2.54mm agujeros; almohadilla PWM11 en el lado inferior) |
| Depurar | Depuración ST, SWC & SWD (en el lado inferior) |
| Actualización de firmware (DFU) | UART1 (TX1, RX1) |
| Indicadores LED | Parpadeo rápido azul: Arrancando; Parpadeo lento azul: comunicándose con el controlador de vuelo; Rojo: indicador de 3.3V |
| Rango de voltaje de entrada | 4.5~5.5V @ almohadilla/pin de 5V& |
| Consumo de energía | 62mA |
| Temperaturas de operación | -30~85 °C |
| Conectores | 5x JST-GH-4P (SM04B-GHS-TB) para CAN1, CAN2, I2C1, UART1, UART4; 1x JST-GH-6P (SM06B-GHS-TB) para UART3+I2C2 |
| Agujeros pasantes | 18x DuPont 2.54mm agujeros |
| Tamaño de la placa | 36mm*36mm*6mm |
| Peso | 5.2g |
| Montaje | 30.5mm 4x Diámetro.3mm |
Lo que incluye
- 1x placa CAN-G474
- 2x cable de silicona JST-GH-4P a JST-GH-4P de 20 cm
- 1x cable de silicona JST-GH-6P a JST-GH-6P de 20 cm
Servicio al cliente: https://rcdrone.top/ o [email protected]
Aplicaciones
- Convertir periféricos compatibles con ArduPilot a periféricos del bus DroneCAN (GNSS, Brújula, Barómetro, Sensor de velocidad del aire, Medidor de distancia, Sensor de proximidad, Inyectores de combustible electrónicos)
- Periféricos basados en GPIO en DroneCAN, incluidos módulos de notificación PWM y LED
- Conexiones de periféricos de ejemplo mostradas: Medidor de distancia, GPS & Brújula, Sensor de velocidad del aire, ENTRADA RC, MONITOR DE BATERÍA I2C
- Opción de redundancia: conectar un bus CAN al controlador de vuelo, o conectar ambos
Manuales
- Descargas de firmware (ArduPilot AP_Periph): https://firmware.ardupilot.org/AP_Periph/
- MatekG474-Periph (para sensores periféricos)
- MatekG474-DShot (para salida DroneCAN-PWM)
- Métodos de actualización
- Herramienta GUI de DroneCAN o Mission Planner – Pestaña DroneCAN, cargar “AP_Periph.bin”
- Modo DFU de STM32CubeProgrammer: conectar módulo USB-TTL a UART1, conectar USB mientras se mantiene presionado el botón DFU, cargar “AP_Periph_with_bl.hex”
- Archivo 3D: CAN-G474_STEP.zip
- Tutorial: Uso de adaptadores MatekL431 para PWM y DShot
Detalles
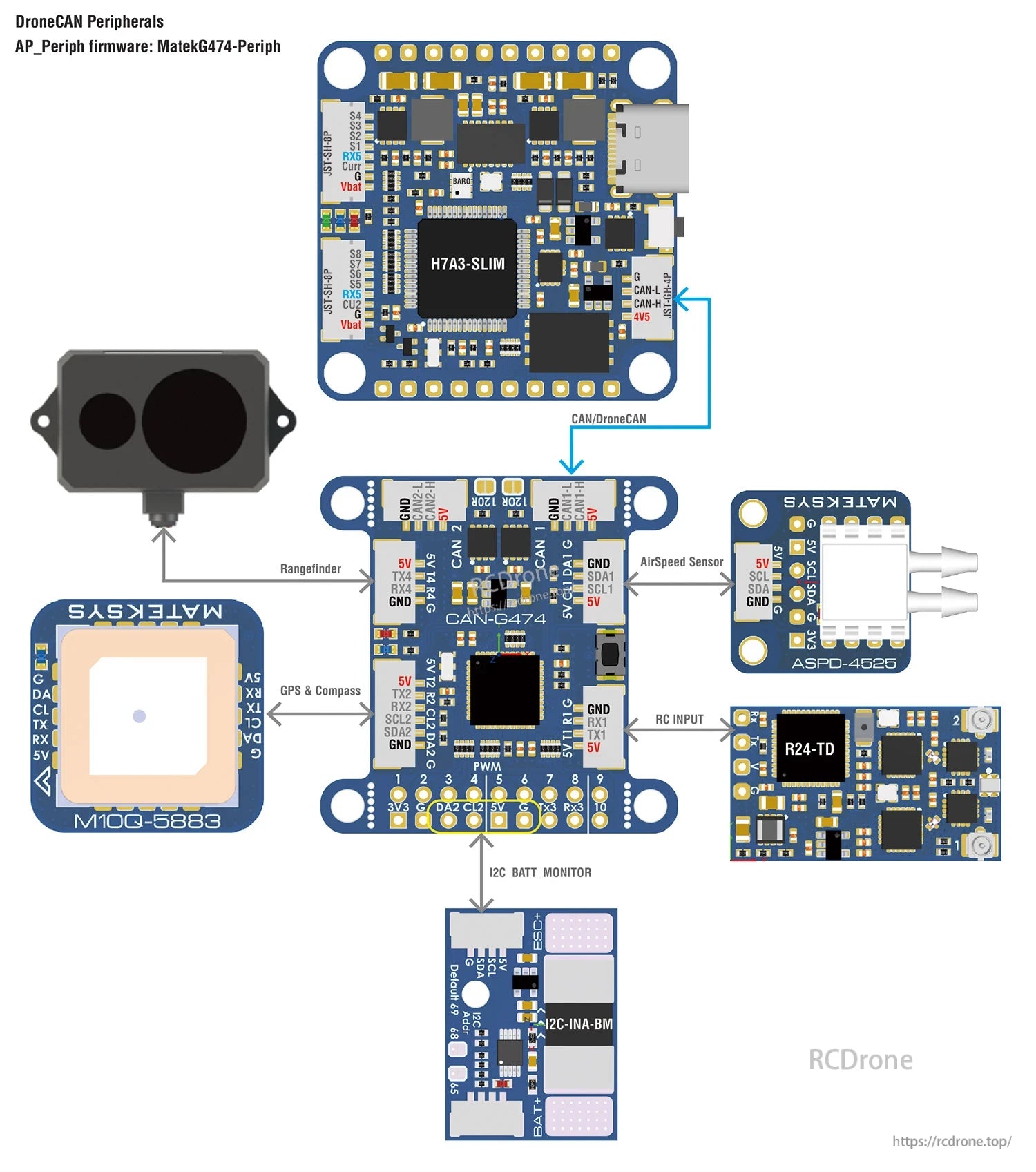
La placa Matek CAN-G474 proporciona un puerto DroneCAN/CAN junto con pads UART, I2C y PWM para conectar periféricos comunes de piloto automático.La placa Matek CAN-G474 se conecta a un bus CAN/DroneCAN y descompone hasta 10 salidas PWM para servos o ESCs.
Related Collections