MATEK F405-TE Controlador de vuelo Baro OSD - Dual BEC 220A Sensor de corriente MicroSD Blackbox 3-8S PDB 30X30mm para Drones FPV Freestyle
MATEK F405-TE Controlador de vuelo Baro OSD - Dual BEC 220A Sensor de corriente MicroSD Blackbox 3-8S PDB 30X30mm para Drones FPV Freestyle
MATEKSYS
No se pudo cargar la disponibilidad de retiro
ESPECIFICACIONES
Uso: Vehículos y juguetes de control remoto
Piezas/accesorios de mejora: Adaptador
Suministros de herramientas: Batería
Dispositivos/periféricos de control remoto: Controlador remoto
Edad recomendada: 12+ años
Piezas y accesorios RC: Controladores de velocidad
Origen: China continental
Número de modelo: MATEK F405-TE
Material: Material compuesto
Atributos de tracción en las cuatro ruedas: Ensamblaje
Para tipo de vehículo: Helicópteros
Nombre de marca: uuustore
Especificaciones
- MCU: 168MHz STM32F405RGT6
- IMU: ICM42688-P (SPI)
- Baro: SPL06-001 (I2C)
- OSD: AT7456E (SPI)
- Caja negra: ranura MicroSD (SPI)
- 6x UART, 1x opción Softserial_Tx (INAV/BF)
- 11 salidas PWM (8x Dshot compatibles con BF/ArduPilot)
- 1x I2C
- 4x ADC (VBAT, corriente, RSSI, velocidad del aire)
- 1x PINIO de repuesto
- 4x almohadillas de alimentación/señal ESC individuales
- 1x grupo de almohadillas G/S1/S2/S3/S4 para señal ESC/GND 4 en 1
- Inversor integrado en UART2-RX para entrada SBUS
- Entrada de cámara dual conmutable
Especificaciones de PDB
- Entrada: 9~36V (3~8S LiPo)
- PDB: 4x 35A (máx. 4x 50A)
- BEC: 5V 1.5A
- BEC: 12V 2A
- LDO 3,3 V: 200 mA
- Señor de corriente: 220 A, 3,3 V ADC (escala INAV/BF 150, ArduPilot 66,7 A/V)
- Divisor de voltaje de batería 1K:20K (escala INAV 2100, escala BF 210, ArduPilot BATT_VOLT_MULT 21.0)
Firmware
- ArduPilot: MatekF405-TE
- INAV: MATEKF405TE_SD
- Vuelo Beta: MATEKF405TE
Físico
- Montaje: 30,5 x 30,5 mm, Φ4 mm con ojales Φ3 mm
- Dimensiones: 36 x 46 mm
- Peso: 10g
Incluyendo
- 1x F405-TE
- 6x arandelas de silicona M4 a M3
- 1x Rubycon ZLH 35V/470uF (ESR bajo)

DISEÑO 5V: BEC integrado 12V, 24 cont. RX6 y TX6: UART6_RX y S9/S10: Salidas PWM (ESC, Servo) 4,4-4,8 V, máx. 80 OmA, el voltaje también se suministra cuando se conecta mediante USB.
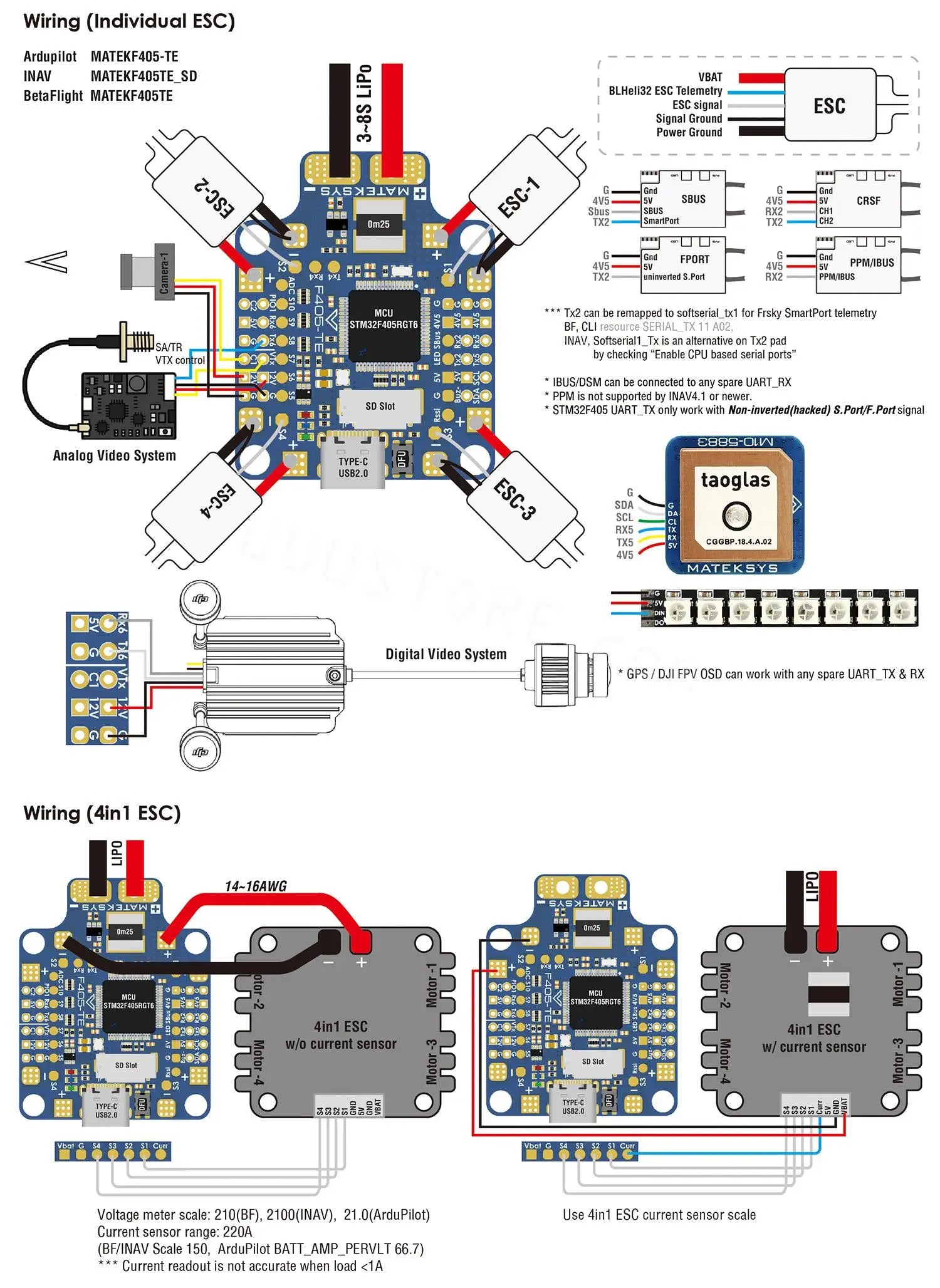
El controlador de vuelo F405-TE cuenta con dos puertos no invertidos, incluido RX2, que se pueden reasignar a softserial1_TX. Además, cualquier puerto UART_RX libre se puede conectar a IBUS_IDSM. Sin embargo, tenga en cuenta que PPM no es compatible con INAV4.
Related Collections