Controlador de vuelo MATEK F405-VTOL - Baro OSD Tarjeta MicroSD Blackbox 2-6S LiPo ArduPilot INAV para RC Multirotor Avión de ala fija
Controlador de vuelo MATEK F405-VTOL - Baro OSD Tarjeta MicroSD Blackbox 2-6S LiPo ArduPilot INAV para RC Multirotor Avión de ala fija
MATEKSYS
No se pudo cargar la disponibilidad de retiro
ESPECIFICACIONES del controlador de vuelo MATEK F405-VTOL
Uso: Vehículos y juguetes de control remoto
Piezas/accesorios de actualización: Adaptador
Suministros de herramientas: Categoría de ensamblaje
Dispositivos/periféricos de control remoto: Controlador remoto
Edad recomendada: 12+años
Piezas y accesorios de RC: Controladores de velocidad
Origen: China continental
Número de modelo: F405-VTOL
Material: Material compuesto
Atributos de tracción en las cuatro ruedas: Ensamblaje
Para tipo de vehículo: Helicópteros
Nombre de marca: uuustore
Controlador de vuelo MATEK F405-VTOL Baro OSD Tarjeta MicroSD Blackbox 2-6S LiPo ArduPilot INAV para avión multirrotor RC de ala fija
- MCU: STM32F405RGT6, 168MHz, 1MB de memoria flash
- IMU: ICM42688-P
- Baro: SPL06-001
- OSD: AT7456E
- Caja negra: Ranura para tarjeta MicroSD
- 6x UART, 1x opción Softserial_Tx (INAV)
- 12 salidas PWM
- 1x I2C
- 4x ADC (VBAT, corriente, RSSI, velocidad del aire)
- 1x PINIO de repuesto
- Extensor USB/Beep con tipo C (USB2.0)
- Inversor integrado en UART2-RX para entrada SBUS
- Entrada de cámara dual conmutable
Firmware FC
- ArduPilot: MatekF405-TE
- INAV: MATEKF405TE_SD (INAV 5.0 o posterior)
PDB
- Rango de voltaje de entrada: 6,8~30V (2~6S LiPo)
- Resistencia de detección: 100 A continuo, 220 A pico
- 5x almohadillas de alimentación ESC, total 100 A continuo
- Admite carga continua de hasta 100 A en la almohadilla ESC cerca de la resistencia del sensor de corriente
- Admite carga continua de hasta 30 A y pico de 50 A en cada plataforma ESC del Quadcopter
- Divisor de voltaje de batería 1K:20K (Escala 2100 en INAV, BATT_VOLT_MULT 21.0 en ArduPilot)
- Señor de corriente: 220 A, 3,3 V ADC (escala 150 en INAV, 66,7 A/V en ArduPilot)
Salida BEC 5V
- Diseñado para controlador de vuelo, receptor, OSD, cámara, zumbador, tira de LED 2812, zumbador, módulo GPS, AirSpeed
- Corriente continua: 2 amperios
Salida BEC 9V /12V
- Diseñado para transmisor de vídeo, cámara, cardán, etc.
- Corriente continua: 2 amperios
- Opción de 12 V con puente
- para una salida estable de 9V/12V, el voltaje de entrada debe > voltaje de salida +1V
Salida BEC Vx
- Diseñado para servos
- Voltaje ajustable, 5 V predeterminado, 6 V o 7,2 V mediante puente
- Corriente continua: 8 amperios, pico de 10 A
- para una salida Vx estable, el voltaje de entrada debe > voltaje Vx +1V
Salida BEC de 3,3 V
- Diseñado para módulo Baro / Compass y externo 3.Periféricos de 3V
- Regulador lineal
- Corriente continua: 200 mA
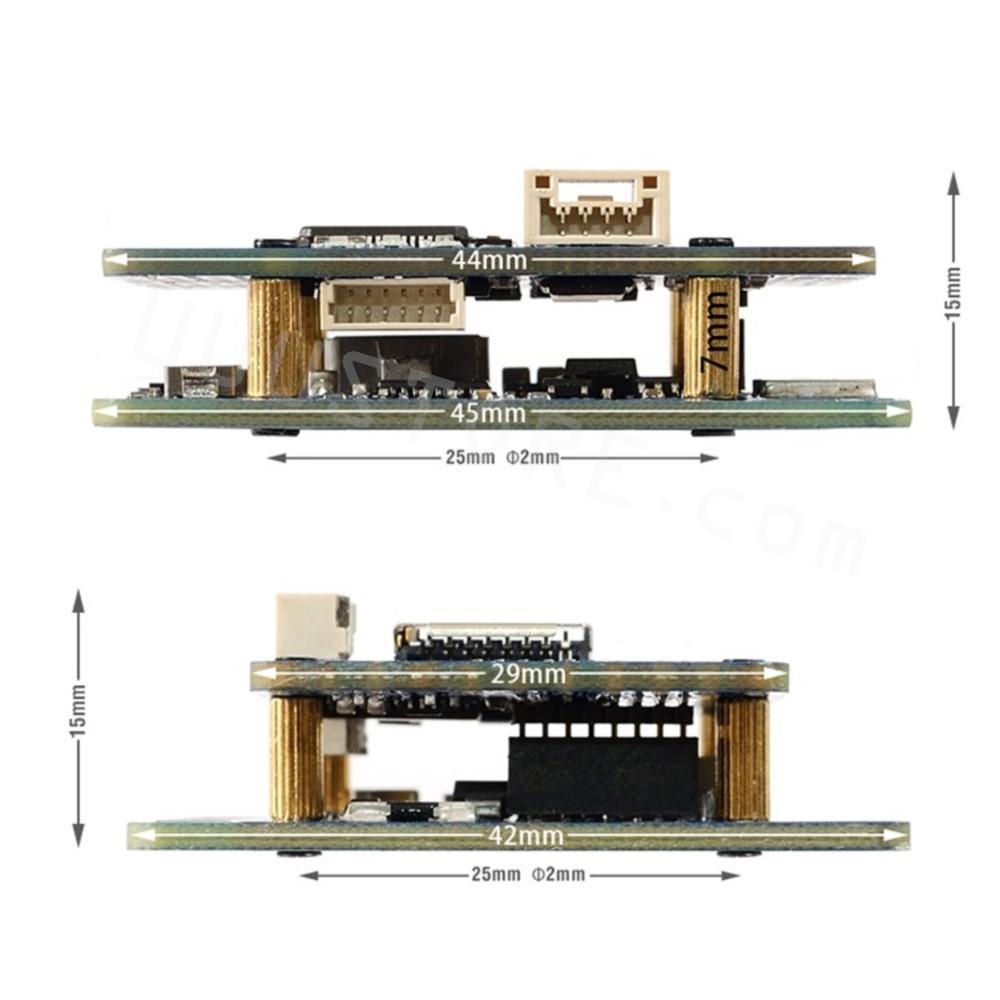
Físico
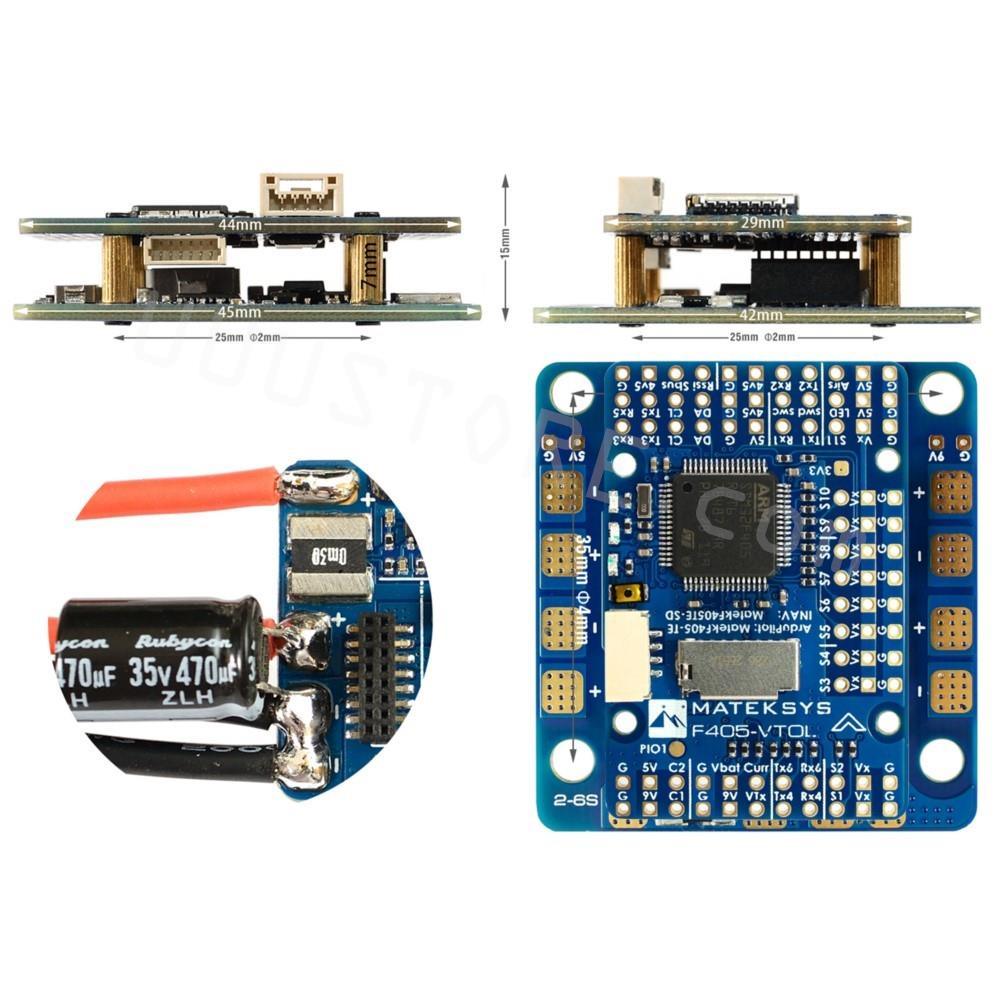
- Montaje: 25 x 25 mm-Φ2 mm, 35 x 35 mm- Φ4 mm
- Dimensiones: 45 x 42 x 15 mm
- Peso: 25 g con adaptador USB/zumbador
Incluyendo
- 1x F405-VTOL
- 1x extensor USB (tipo C)/bip (zumbador pasivo) + cable JST-SH-6P a JST-SH-6P de 20 cm para extensor USB.
- 1 cable JST-GH-4P a JST-GH-4P de 20 cm para puerto I2C
- 1x condensador Rubycon ZLH 35V 470uF
- Dupont 2,54 pines (La placa se envía sin soldar)
Guía de inicio rápido de F405-VTOL PDF
http://www.mateksys.com/downloads/Manual/F405-VTOL_Manual.pdf
R21K27-09 ON JFF M1O-5883 El GPS puede funcionar con cualquier cableado UART_TX y RX de repuesto (Bal g)
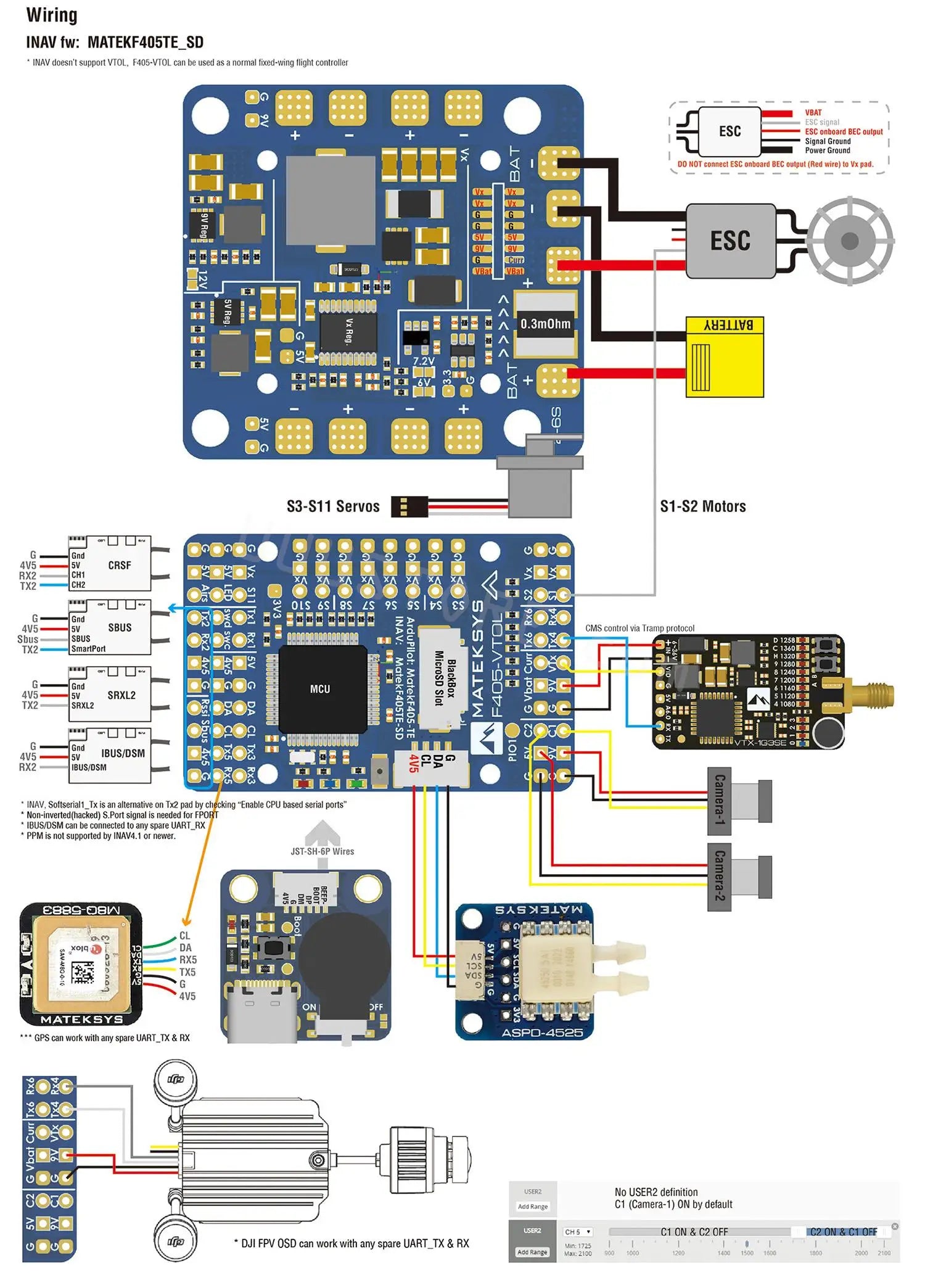

Tenga en cuenta que este producto admite configuraciones BEC (circuito eliminador de batería) para 6 V/7 V, con una configuración predeterminada de 5 V a 8 A de corriente continua. El ESC (Controlador Electrónico de Velocidad) no se suministra vía USB. Para las cámaras, asegúrese de que ambas estén configuradas en formatos de video idénticos, ya sea PAL o NTSC. Además, el rango de voltaje recomendado para las baterías LiPo es entre 4,4 y 4,8 V.
Related Collections