MATEK CAN-L4-BM - Mateksys AP_PERIPH CAN MONITOR DE ENERGÍA DIGITAL
MATEK CAN-L4-BM - Mateksys AP_PERIPH CAN MONITOR DE ENERGÍA DIGITAL
MATEKSYS
No se pudo cargar la disponibilidad de retiro
MATEK CAN-L4-BM - ESPECIFICACIONES DEL MONITOR DE ENERGÍA DIGITAL AP_PERIPH CAN de Mateksys
Uso: Vehículos y juguetes de control remoto
Edad recomendada: 12+años, 14+años
Origen: China continental
Material: Material compuesto
Nombre de marca: MATEKSYS
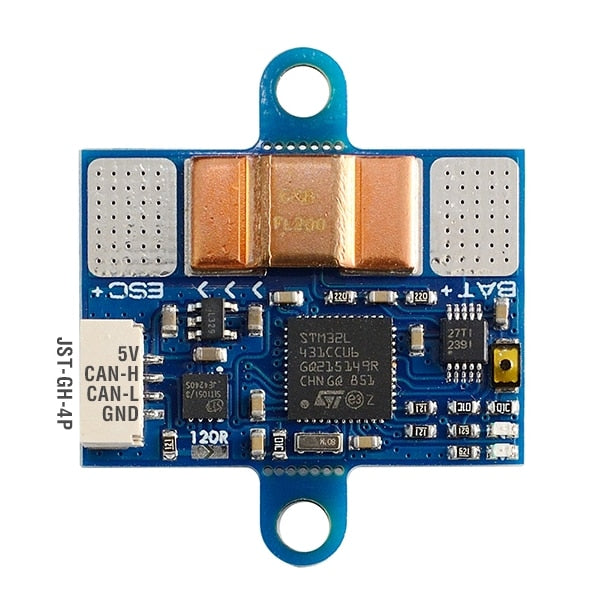
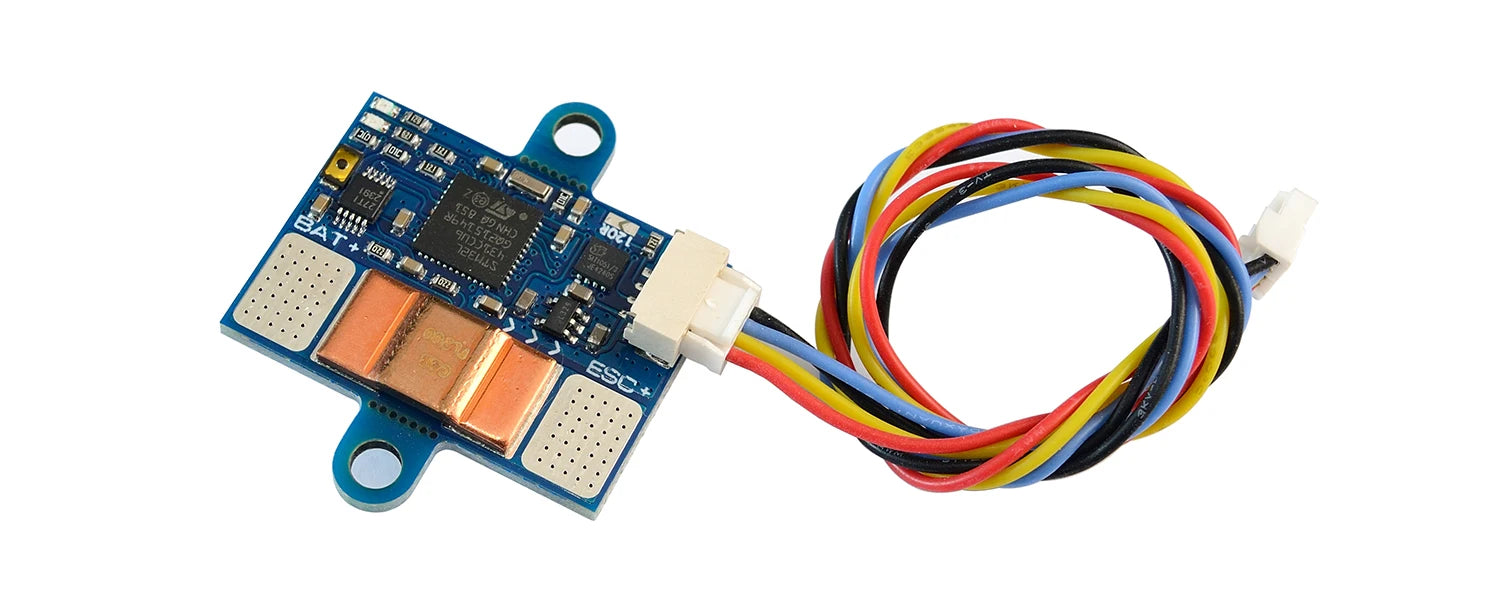
AP_PERIPH CAN MONITOR DE ENERGÍA DIGITAL, CAN-L4-BM
Corriente 0~204,8A, voltaje 0~85V, protocolo CAN/DroneCAN
-
CAN-L4-BM es un monitor de energía digital ultrapreciso basado en el firmware TI INA239 y ArudPilot AP_Periph.
-
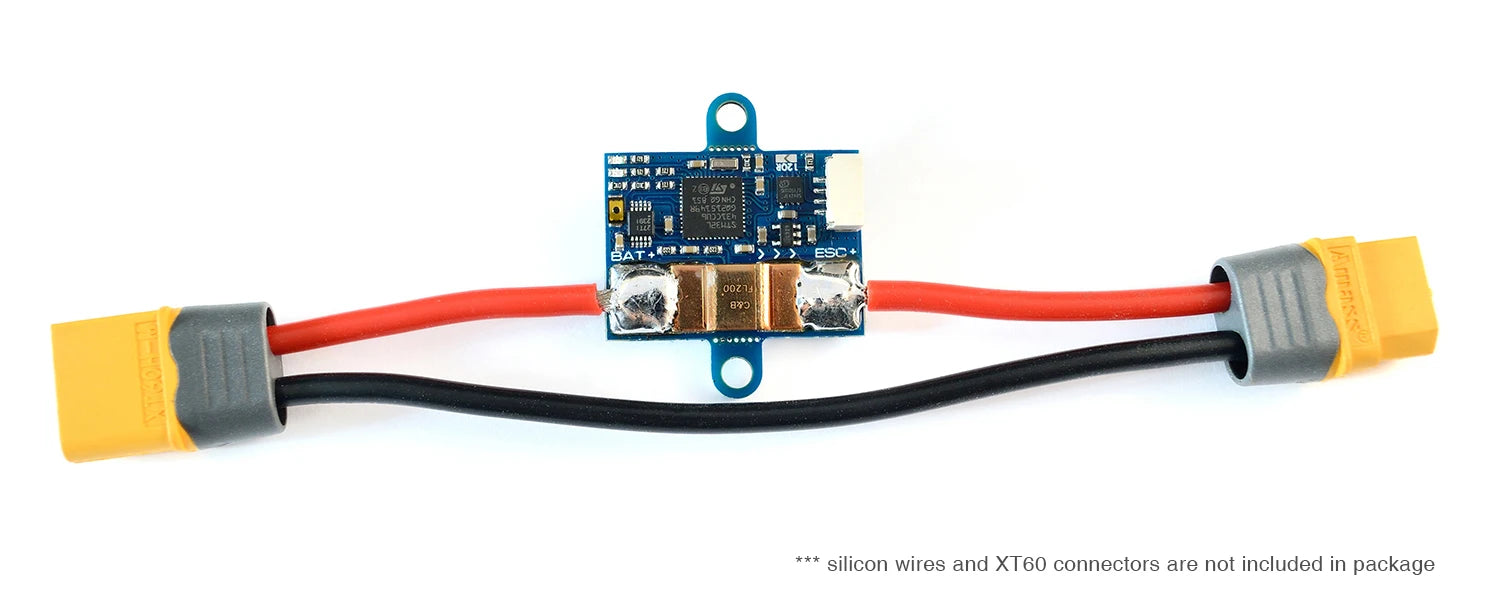
La resistencia de esta ruta conductora es típica de 200 μΩ, lo que proporciona una baja pérdida de energía en la aplicación.
-
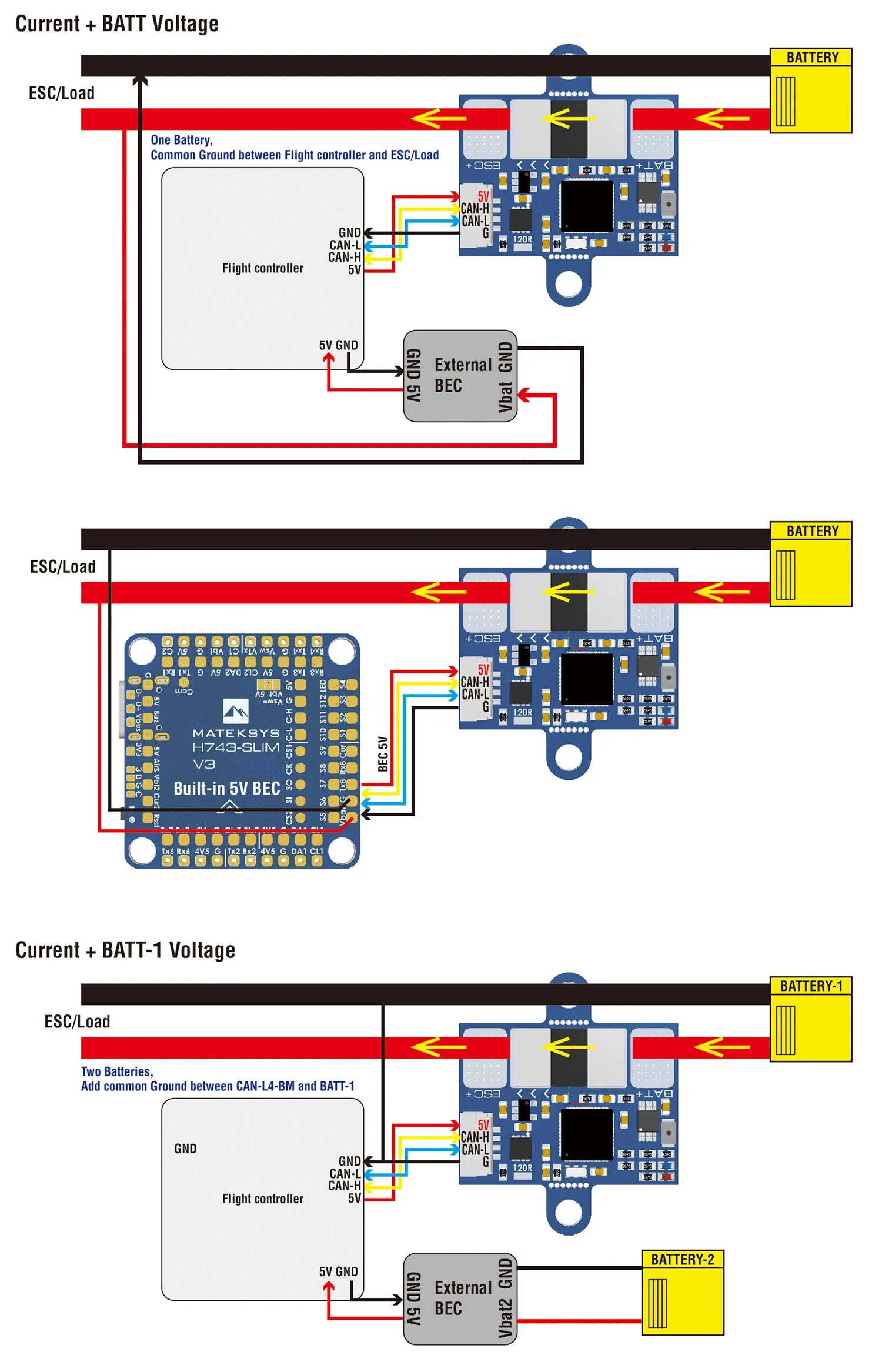
Con este dispositivo, no se requiere calibración, el controlador de vuelo compatible con el protocolo DroneCAN puede obtener fácilmente lecturas precisas de corriente y voltaje del bus a través del bus CAN.
Especificaciones
-
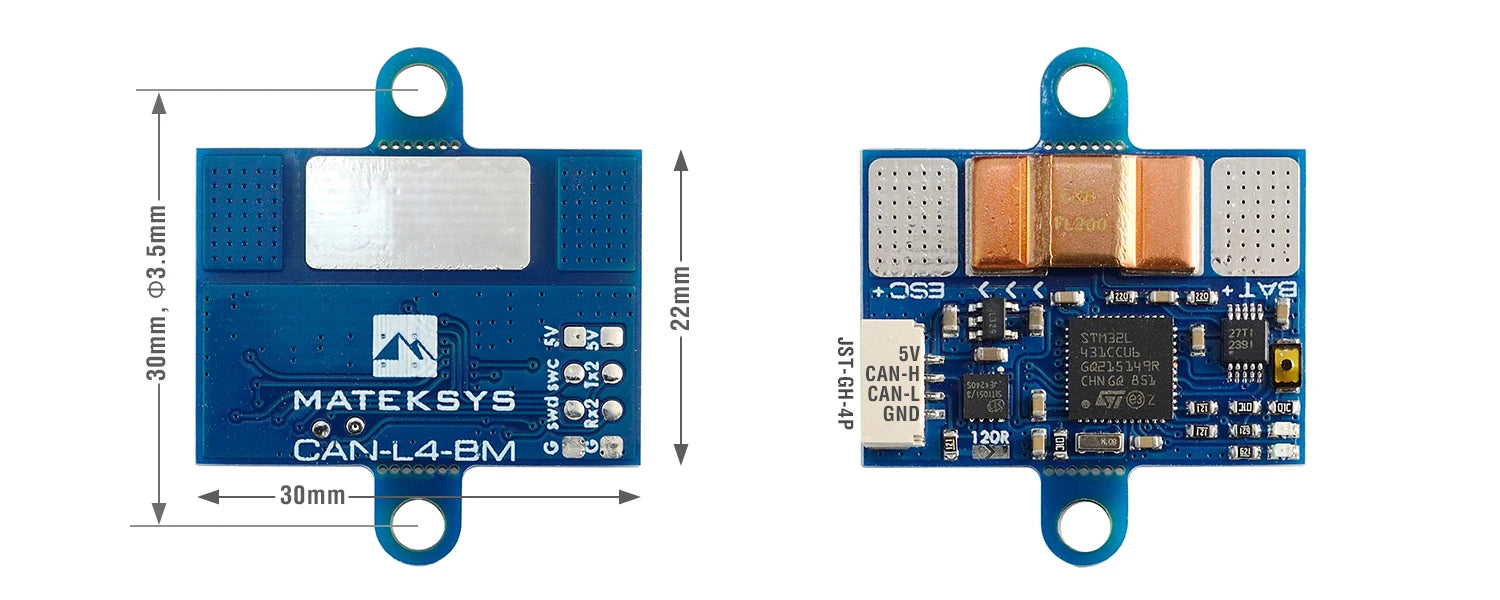
MCU: STM32L431xC, memoria flash de 256 KB
-
CI de monitor de energía de alta precisión, INA239, 85 V, 16 bits, con interfaz SPI
-
Entrada de detección de voltaje de la batería: 0~85V
-
Rango de detección de corriente: 0~204,8A
-
Corriente de carga en la resistencia de detección de corriente: 150 A (continua), 204,8 A (ráfaga)
-
Precisión de voltaje: ± 0,1%
-
Precisión actual: ± 2%
-
Interfaz
-
CAN, protocolo DroneCAN
-
UART2, repuesto, DFU
-
Depuración ST, SWCLK y SWDIO
-
-
LED
-
Azul, parpadeo rápido, arrancando
-
Azul, parpadeando lentamente, funcionando
-
Rojo, indicador de 3,3 V
-
Fuente de alimentación para la placa CAN-L4-BM: 4,5 ~ 5,5 V @ almohadilla/pin de 5 V
-
Consumo de energía: 10 mA
-
Temperaturas de funcionamiento: -40~85 °C
-
Físico
-
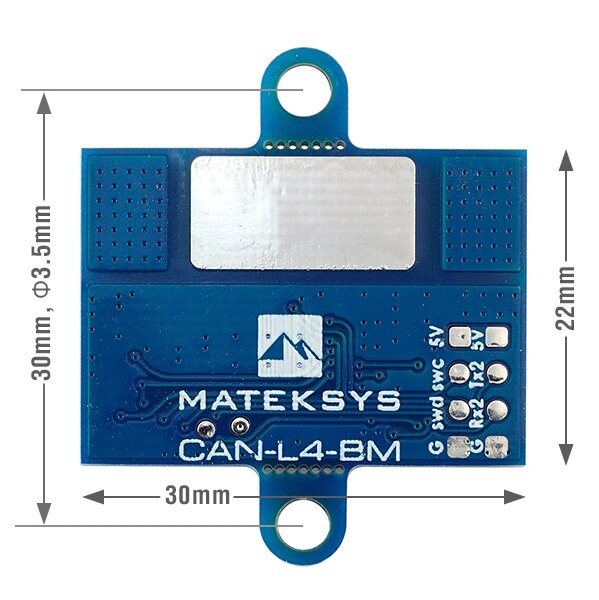
Tamaño del tablero: 30 mm * 22 mm * 3 mm. 4g
-
Archivo 3D: CAN-L4-BM_STEP.zip
-
-
Firmware
-
ArduPilot AP_Periph MatekL431-BattMon
-
Actualización a través de la herramienta GUI DroneCAN
-
-
Parámetros
-
CAN_P1_DRIVER = 1 si está conectado al puerto CAN bus1 o CAN_P2_DRIVER = 1 si está conectado al puerto CAN bus2
-
BATTx_MONITOR = 8 (DroneCAN-BatteryInfo)
-
Embalaje
-
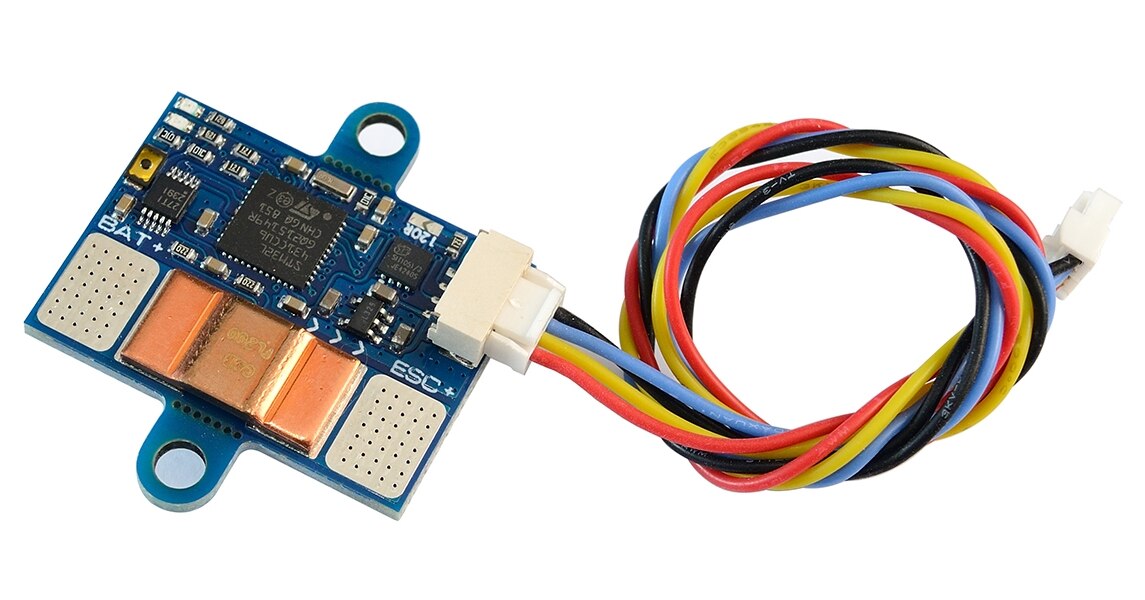
1x placa CAN-L4-BM
-
1 cable de silicona JST-GH-4P a JST-GH-4P de 20 cm
Consejos
-
La almohadilla grande en la parte inferior es una almohadilla muerta. No hay ninguna red de circuitos en él.
-
Suelde los cables positivos lo más cerca posible de ambos lados de la resistencia de detección de corriente.
-
Se pueden cortar 2 orejas para el montaje si no las necesita.
-
Si los cables CAN son demasiado largos, conecte el puente “120R”.
Related Collections