MATEK Mateksys AP_PERIPH NODO CAN L431
MATEK Mateksys AP_PERIPH NODO CAN L431
MATEKSYS
No se pudo cargar la disponibilidad de retiro
ESPECIFICACIONES DEL NODO CAN L431 DE MATEK Mateksys AP_PERIPH
Uso: Vehículos y juguetes de control remoto
Edad recomendada: 12+años, 14+años, 3-6 años, 6-12 años, 0-3 años
Origen: China continental
Material: Material compuesto
Nombre de marca: MATEKSYS
AP_PERIPH NODO CAN L431
AP_Periph, nodo CAN, DroneCAN, L431


-
CAN-L431 es un nodo adaptador basado en el firmware ArudPilot AP_Periph.
-
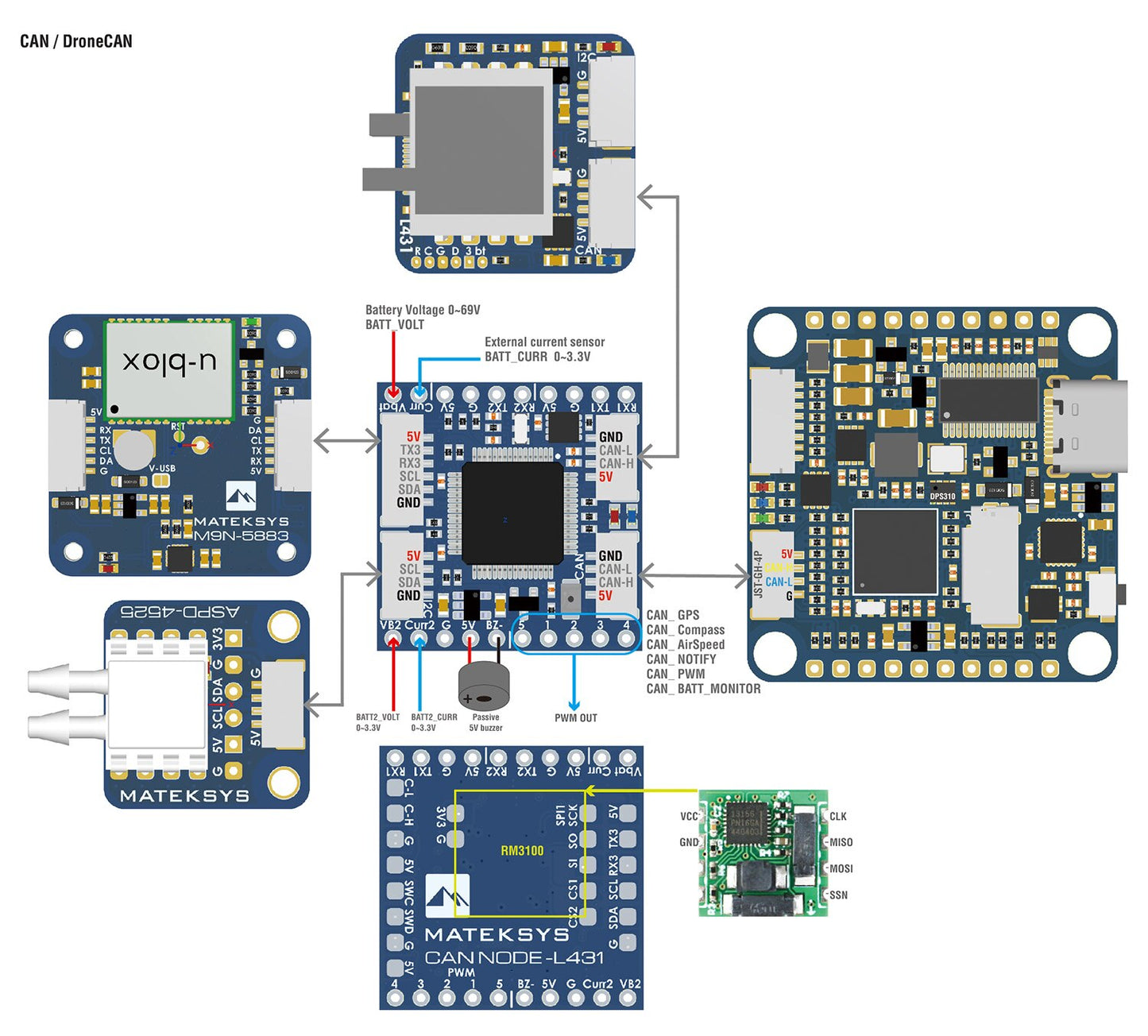
Con esta placa, puede utilizar fácilmente la biblioteca de controladores ArduPilot para convertir periféricos GNSS, brújula, barómetro, sensor de velocidad aérea y GPIO (PWM, notificación de zumbador/LED) compatibles con ArduPilot en periféricos de bus DroneCAN.
Especificaciones
-
MCU: STM32L431xC, memoria flash de 256 KB
-
Velocidad de datos del transceptor CAN de hasta 5 Mbit/s en la fase rápida CAN FD
-
1x CAN, protocolo DroneCAN (2x conectores GH-4P en paralelo)
-
3x UART
-
UART1, repuesto
-
UART2, MSP predeterminado, DFU
-
UART3, GPS predeterminado
-
-
1xI2C
-
para sensor periférico de velocidad aérea
-
para barómetro periférico
-
para brújula periférica QMC5883L
-
-
1x SPI
-
para periférico RM3100
-
-
4x ADC
-
BATT_VOLT, PIN 5
-
BATT_CURR, PIN 6
-
BATT2_VOLT, PIN 15
-
BATT2_CURR, PIN 16
-
-
5x salidas PWM
-
1x GPIO con TIM16 para zumbador
-
Depuración ST, SWCLK y SWDIO
-
LED
-
Azul, parpadeo rápido, arrancando
-
Azul, parpadeando lentamente, funcionando
-
Rojo, indicador de 3,3 V
-
Rango de voltaje de entrada: 4,5 ~ 5,5 V @ almohadilla/pin de 5 V
-
Consumo de energía: 40 mA
-
Temperaturas de funcionamiento
-
Físico
-
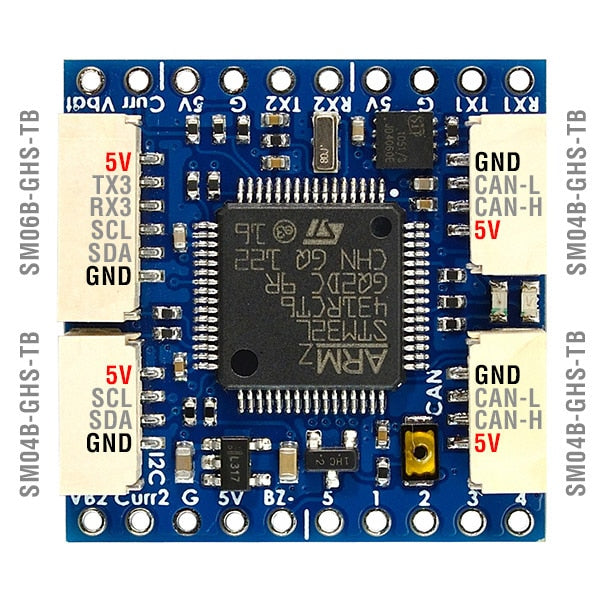
2x JST-GH-4P(SM04B-GHS-TB) para CAN
-
1x JST-GH-4P(SM04B-GHS-TB) para I2C
-
1x JST-GH-6P(SM06B-GHS-TB) para UART3+I2C
-
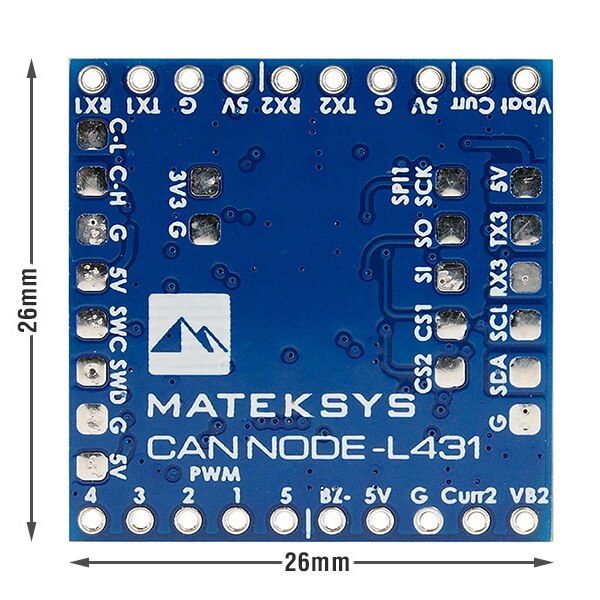
Tamaño del tablero: 26 mm * 26 mm * 6 mm. 3,7g
-
Archivo 3D: CAN-L431_STEP.zip
-
-
Firmware
-
ArduPilot AP_Periph MatekL431-Periph o MatekL431-Airspeed
-
Actualización a través de la herramienta GUI DroneCAN
-
Embalaje
-
1x placa CAN-L431
-
1 cable de silicona JST-GH-4P a JST-GH-4P de 20 cm
-
1 cable de silicona JST-GH-6P a JST-GH-6P de 20 cm
Consejos
-
Firmware MatekL431-Periph admite brújula I2C QMC5883L de forma predeterminada
-
Si conecta otra brújula I2C a esta placa, debe actualizarla con este firmware a través de DroneCAN GUI o modo SLCAN en Mission Planner.
-
Related Collections