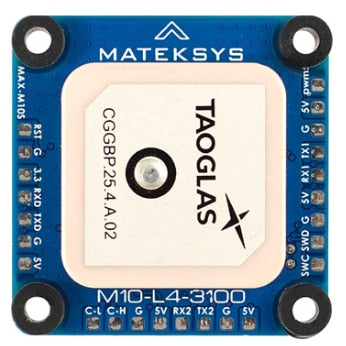
Módulo GPS MATEK M10-L4-3100 - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
Módulo GPS MATEK M10-L4-3100 - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEKSYS
No se pudo cargar la disponibilidad de retiro
MATEK M10-L4-3100 - ESPECIFICACIONES GNSS AP_PERIPH de Mateksys
Uso: Vehículos y juguetes de control remoto
Edad recomendada: 12+años, 14+años, 6-12 años
Origen: China continental
Material: Material compuesto
Nombre de marca: MATEKSYS
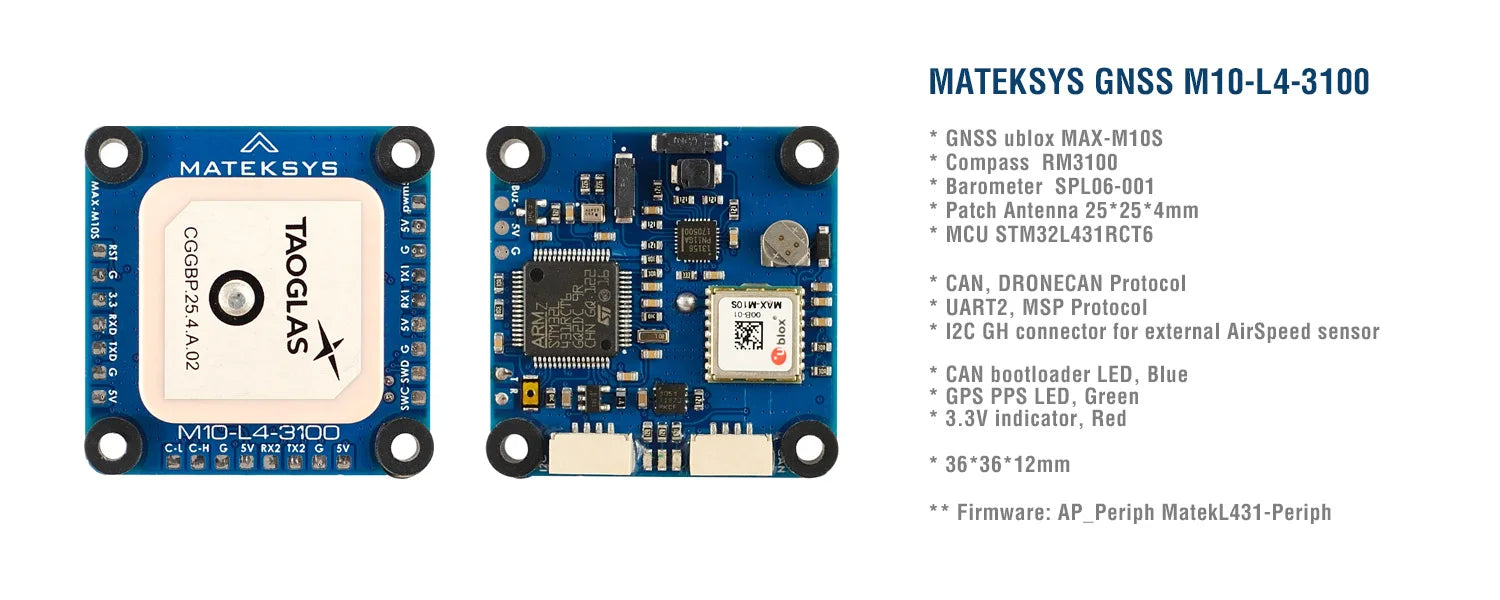
AP_PERIPH GNSS M10-L4-3100
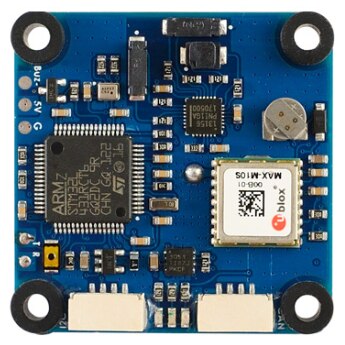
AP_Periph L431 nodo CAN, MAX-M10S, RM3100, SPL06-001, protocolo DroneCAN y UART_MSP
-
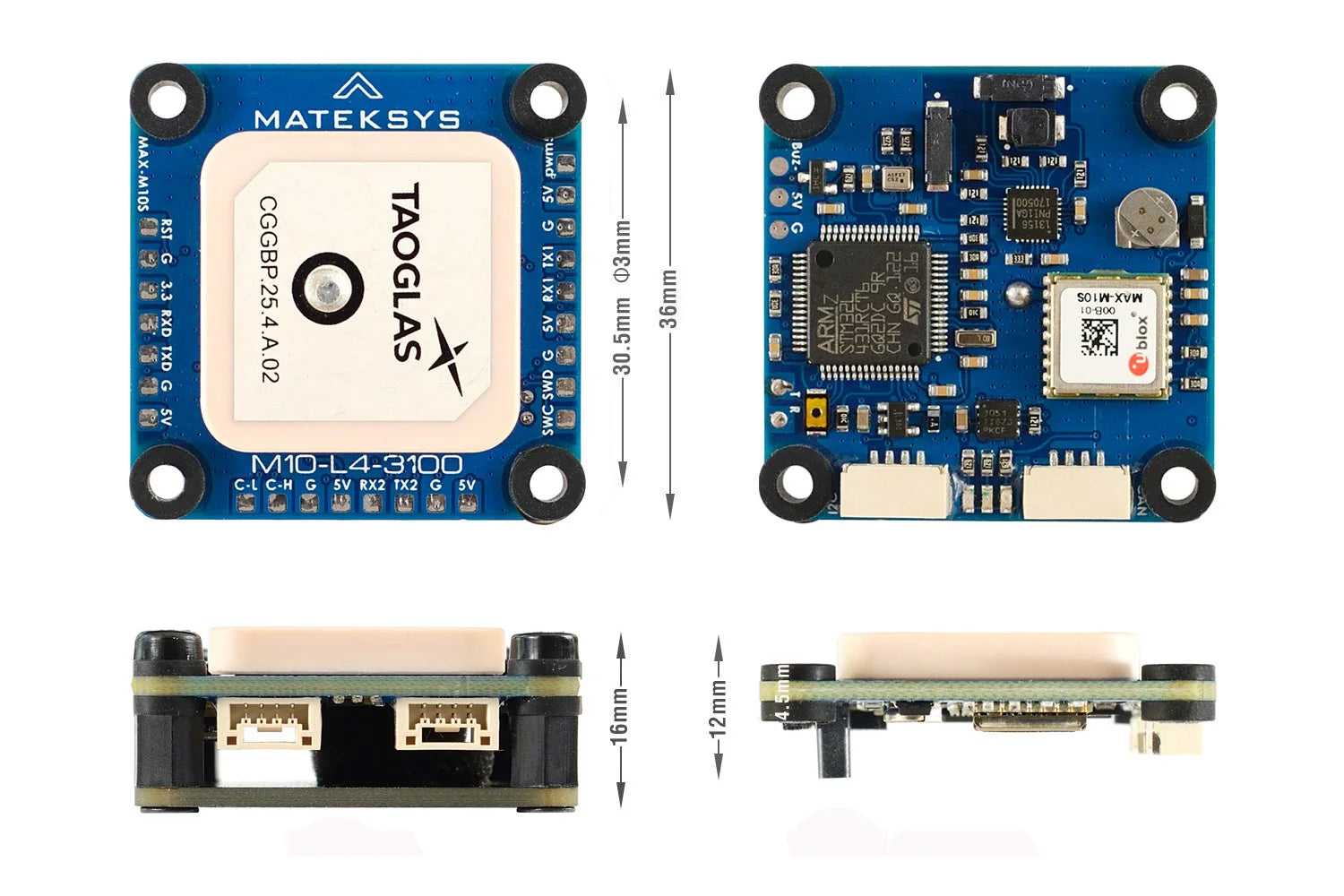
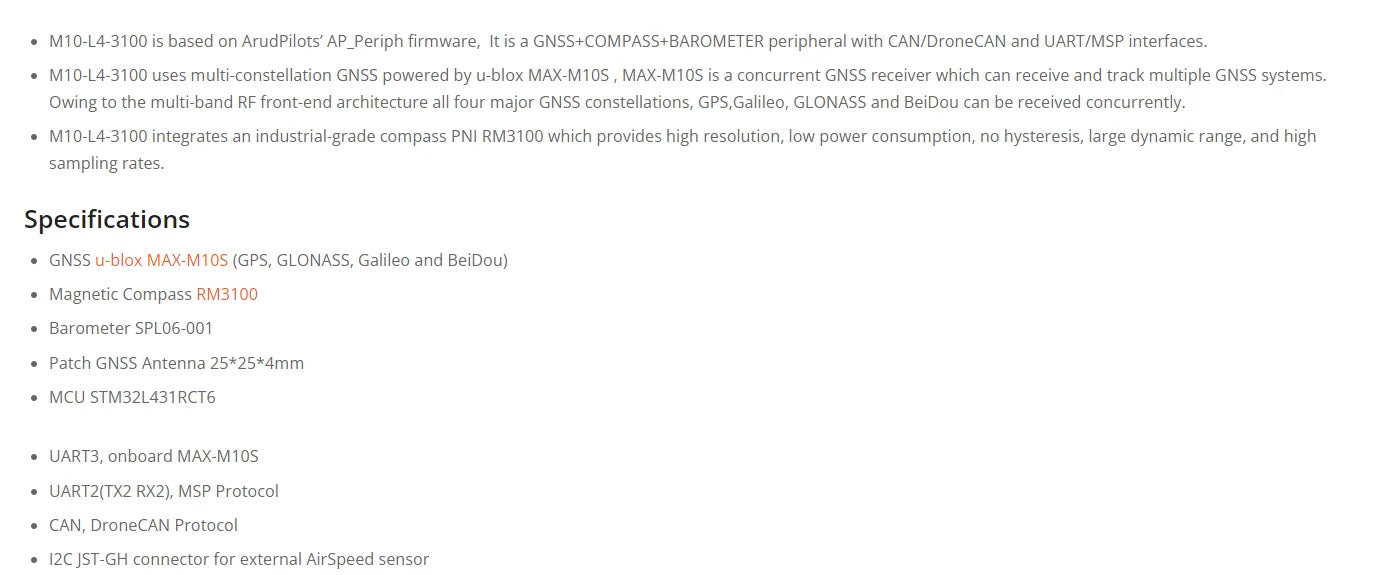
M10-L4-3100 se basa en el firmware AP_Periph de ArudPilots. Es un periférico GNSS+COMPASS+BAROMETER con interfaces CAN/DroneCAN y UART/MSP.
-
M10-L4-3100 utiliza GNSS de constelaciones múltiples impulsado por u-blox MAX-M10S, MAX-M10S es un receptor GNSS concurrente que puede recibir y rastrear múltiples sistemas GNSS. Gracias a la arquitectura frontal de RF multibanda, las cuatro constelaciones GNSS principales, GPS, Galileo, GLONASS y BeiDou, se pueden recibir simultáneamente.
-
M10-L4-3100 integra una brújula de grado industrial PNI RM3100 que proporciona alta resolución, bajo consumo de energía, sin histéresis, amplio rango dinámico y altas tasas de muestreo.

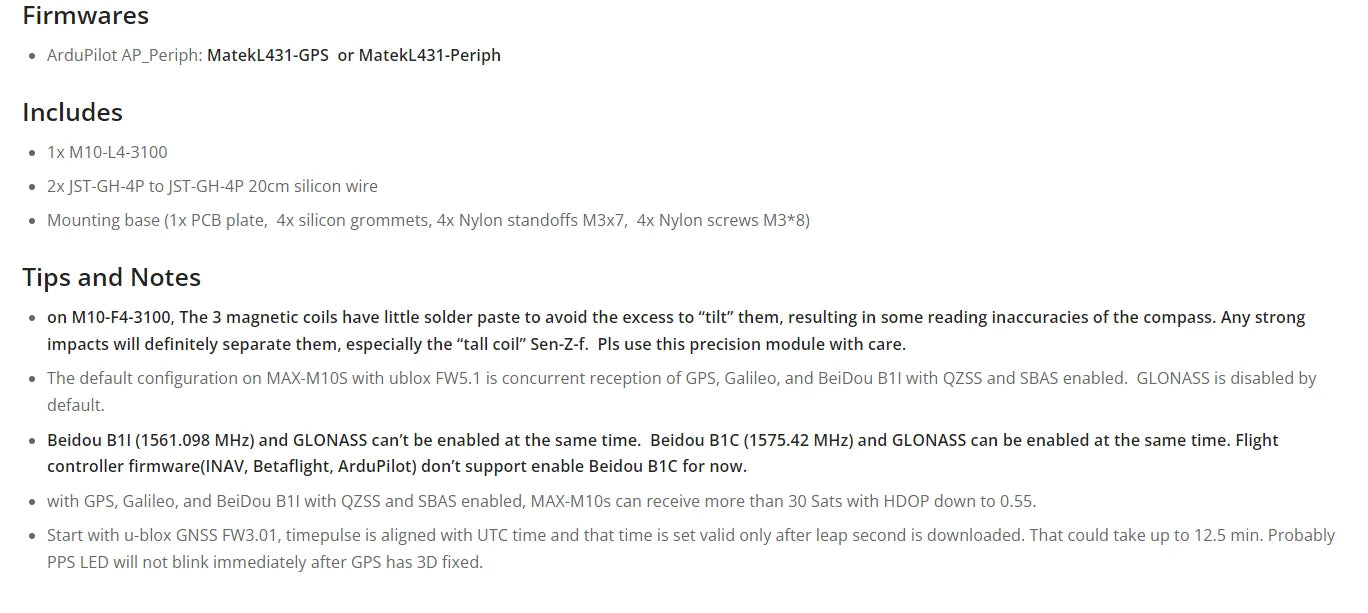
la configuración predeterminada en MAX-M1OS con ublox FWS. es la recepción simultánea de GPS, Galileo y BeiDou BI con QZSS y SBAS habilitados. GLONASS está deshabilitado de forma predeterminada en Beidou B1I (1575,42 MHz) y no se puede habilitar al mismo tiempo.
Conexión CAN (protocolo UAVCAN)
-
M10-L4-3100 5V — FC 4,5 V ~ 5.3V
-
M10-L4-3100 CAN-H — FC CAN alto
-
M10-L4-3100 CAN-L — FC CAN bajo
-
M10-L4-3100 G — FC G/GND
Parámetros FC UAVCAN (ArduPilot)
-
CAN_D1_PROTOCOLO -> 1
-
CAN_P1_DRIVER -> 1
-
GPS_TYPE -> 9 (DroneCAN)
-
COMPASS_TYPEMASK -> 0 (asegúrese de que DroneCAN no esté marcado)
—————————————————————————–
Si conecta el sensor de velocidad aérea I2C al puerto I2C de M10-L4-3100
-
ARSPD_TYPE -> 8 (UAVCAN)
-
ARSPD_USE -> 1
Y debe configurar los parámetros del nodo CAN para el sensor de velocidad del aire conectado al puerto I2C de M10-L4-3100
Planificador de misión > Configuración inicial > Hardware opcional > UAVCAN > Modo SLCan CAN1 > Parámetros
-
MS4525 ARSP_TYPE -> 1 (predeterminado en hwdef)
-
MS5525 ARSP_TYPE -> 3 admite MS5525 con dirección 0x77 únicamente
-
SDP3X ARSP_TYPE -> 6
-
DLVR-L10D ARSP_TYPE -> 9
-
Escribir y reiniciar
—————————————————————————–
Si conecta 2812LED DIN al pad PWM5
-
NTF_LED_TYPES -> (asegúrese de que DroneCAN esté marcado)
Modo SLCan CAN1 > Parámetros
-
OUT5_FUNCTION 120
-
NTF_LED_TYPES 455
-
AP_Periph fw debe ser “MatekL431-Periph”, la función MSP está deshabilitada en “MatekL431-GPS”
Conexión UART (protocolo MSP)
-
M10-L4-3100 5V — FC 4,0V ~ 5,3V
-
M10-L4-3100 TX2 — FC repuesto UART_RX
-
M10-L4-3100 RX2 — FC UART_TX de repuesto (no esencial)
-
M10-L4-3100 G — FC G/GND
Parámetros FC de ArduPilot (desde 4.1.x)
-
Serialx_PROTOCOL = 32 (MSP) donde x es el puerto SERIAL utilizado para la conexión en piloto automático.
-
Serialx_BAUD = 115 donde x es el puerto SERIAL utilizado para la conexión en piloto automático.
-
TIPO DE GPS = 19 (MSP)
-
BARO_PROBE_EXT = 4096 (MSP Baro)
-
BARO_PRIMARY = 1 (Si desea utilizar MSP baro como baro principal, de lo contrario déjelo como predeterminado)
-
COMPASS_TYPEMASK 0 (o asegúrese de que el bit MSP no esté marcado)
Parámetros FC INAV (desde 2.6)
-
M10-L4-3100 es compatible con cualquier controlador de vuelo compatible con INAV a través de un UART de repuesto.
-
En la pestaña de puertos, habilite MSP en el UART correspondiente que M10-L4-3100 conectó, NO habilite "GPS" en ese UART. seleccione Velocidad en baudios 115200.
-
función GPS
-
establecer proveedor_gps = MSP
-
establecer mag_hardware = MSP
-
establecer baro_hardware = MSP
-
establezca align_mag = CW90, si la brújula está montada plana con la flecha hacia adelante y la flecha del controlador de vuelo también está orientada hacia adelante.
Related Collections