MATEK F405-WTE - CONTROLADOR DE VUELO Mateksys
MATEK F405-WTE - CONTROLADOR DE VUELO Mateksys
MATEKSYS
No se pudo cargar la disponibilidad de retiro
MATEK F405-WTE - ESPECIFICACIONES DEL CONTROLADOR DE VUELO Mateksys
Uso: Vehículos y juguetes de control remoto
Edad recomendada: 12+años, 14+años
Origen: China continental
Material: Material compuesto
Nombre de marca: MATEKSYS
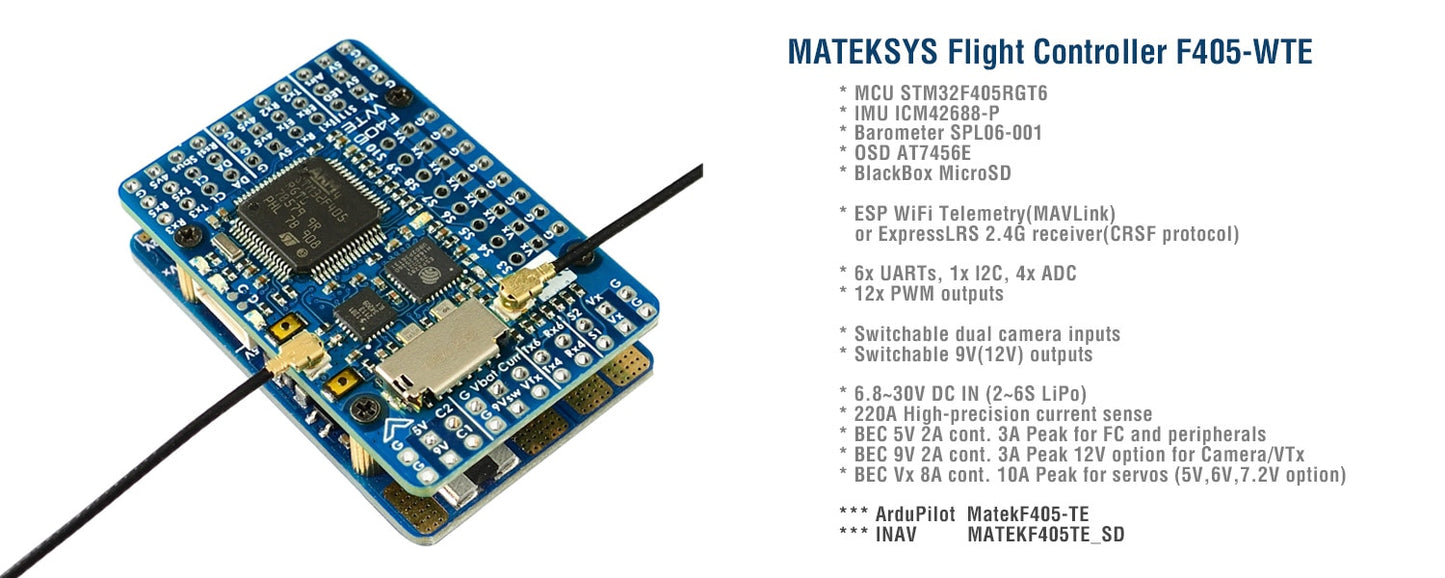
CONTROLADOR DE VUELO F405-WTE
STM32F405RGT6, ICM42688P, SPL06, OSD, telemetría ESP WIFI/receptor ELRS 2.4G, 6xUART, 12x PWM, 1xI2C
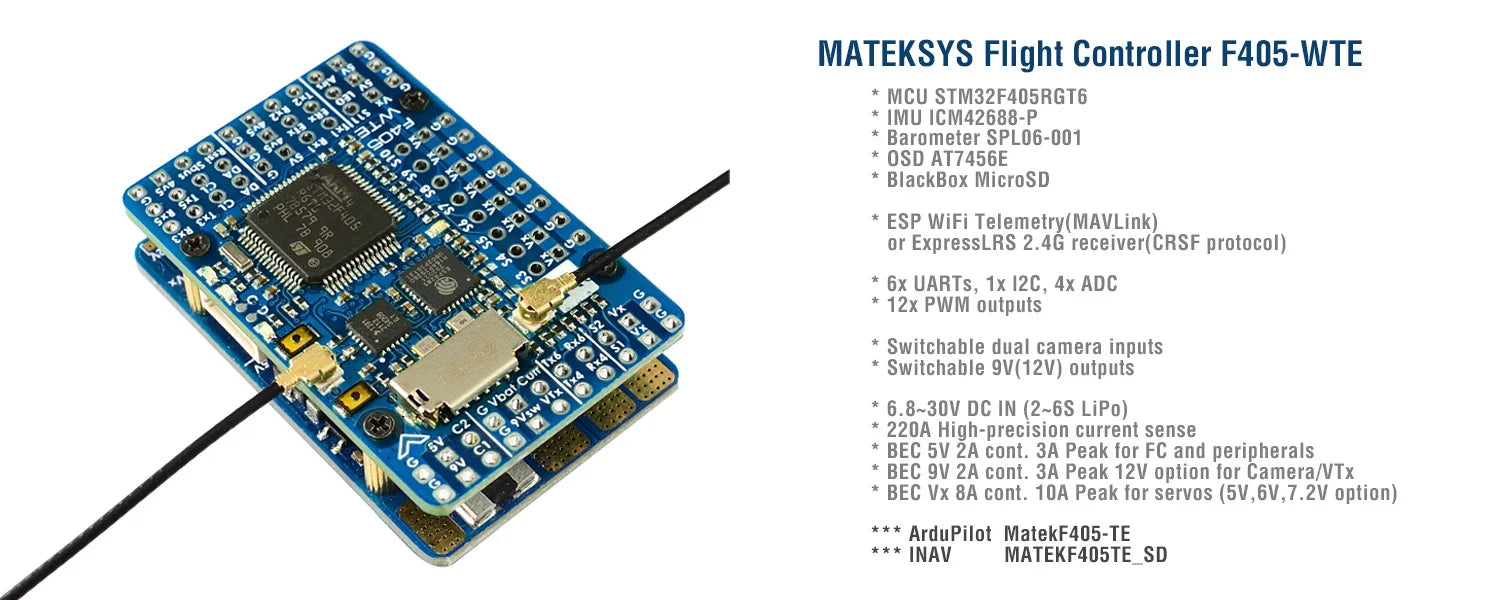
Controlador de vuelo MATEKSYS F4O5-WTE MCU STM3ZFAOSRGT6 IMU ICM42688-P Barómetro SPLO6-001 OSD AT7456E BlackBox MicroSD 2 8 2 2 2 ESP WiFi Telemetría (MAVLink) 2 o receptor ExpressLRS 2.4G (protocolo CRSF) 6x UART, Ix I2C, 4x ADC 85 12x salidas PWM Entradas de cámara dual conmutables 4+

Especificaciones FC
-
MCU: STM32F405RGT6, 168MHz, 1MB de memoria flash
-
IMU: ICM42688-P
-
Baró: SPL06-001
-
OSD: AT7456E
-
Caja negra: ranura para tarjeta MicroSD
-
Telemetría WiFi ESP (MAVLink, 14dBm)
-
Receptor ExpressLRS 2.4G (protocolo CRSF, telemetría 12dBm)
-
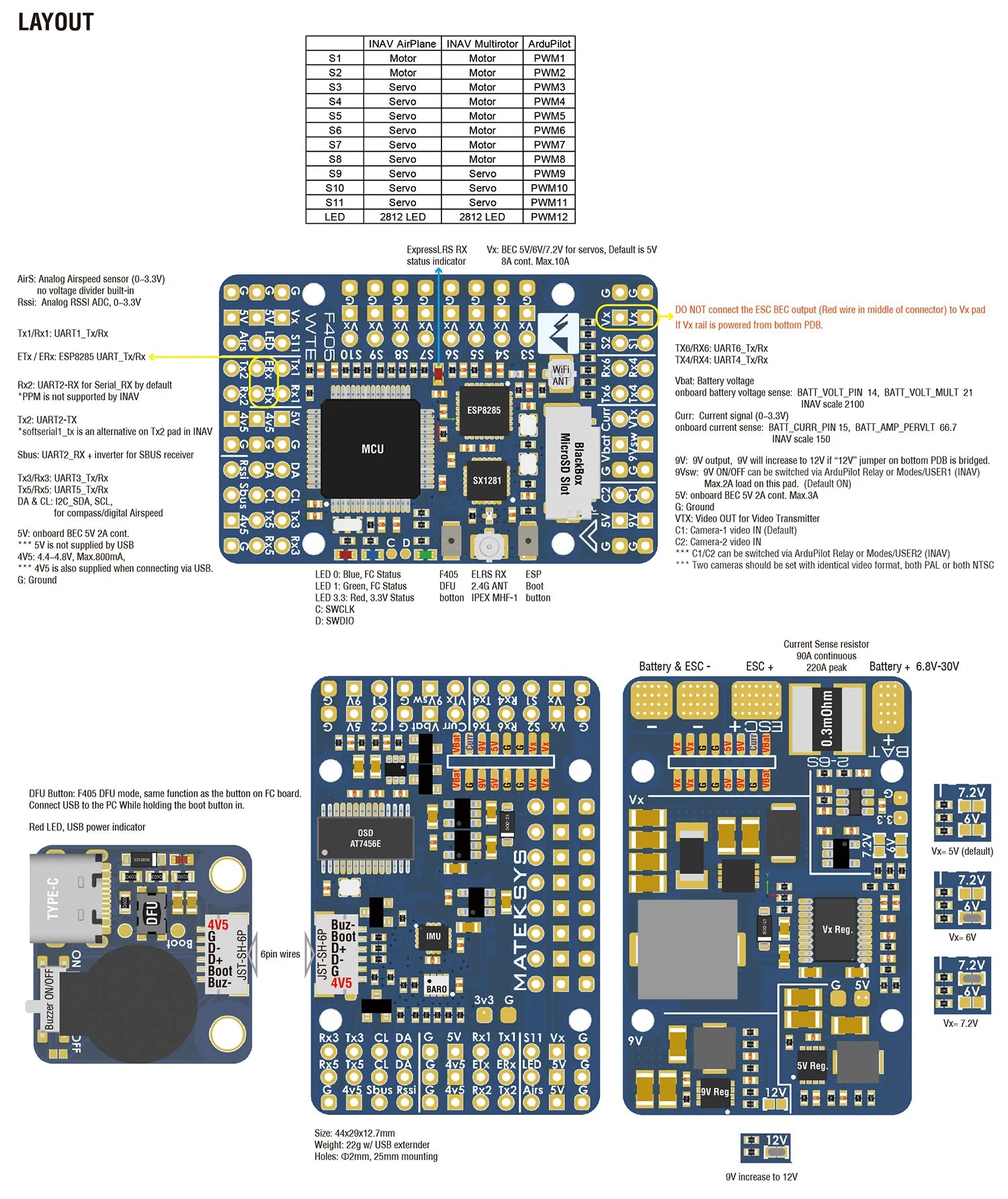
6x UART, 1x opción Softserial_Tx (INAV)
-
12 salidas PWM
-
1xI2C
-
4x ADC (VBAT, corriente, RSSI, velocidad del aire)
-
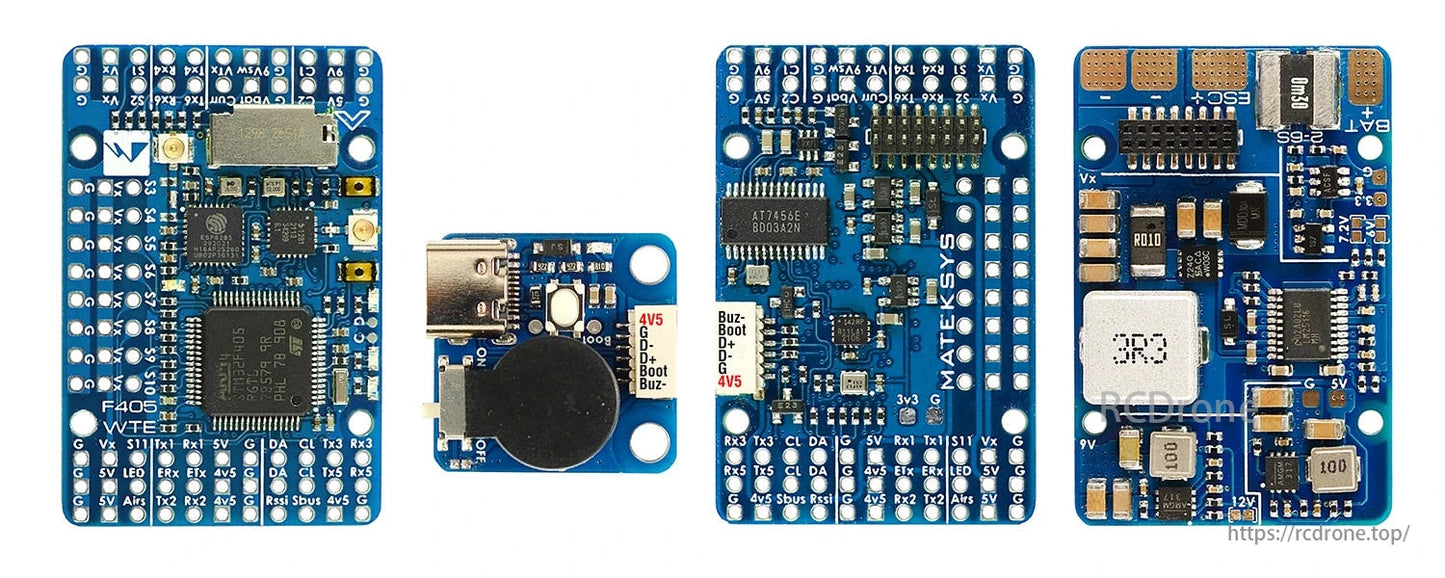
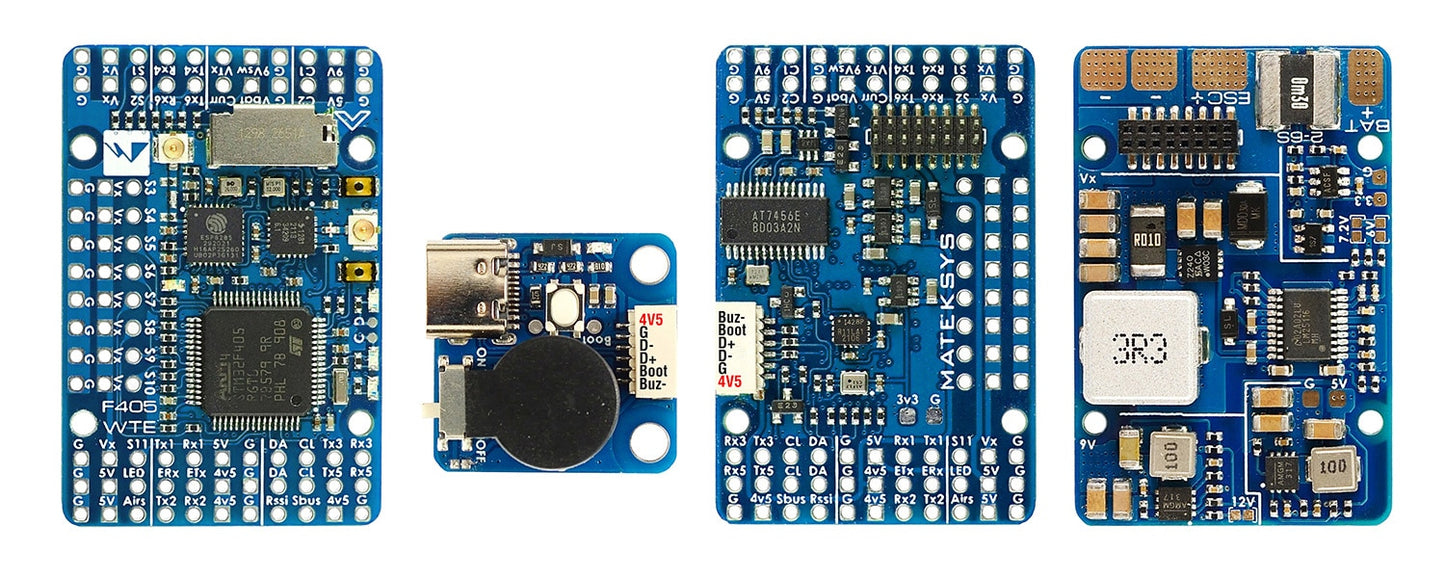
Extensor USB/Beep con tipo C (USB2.0)
-
Interruptor de entradas de cámara dual
-
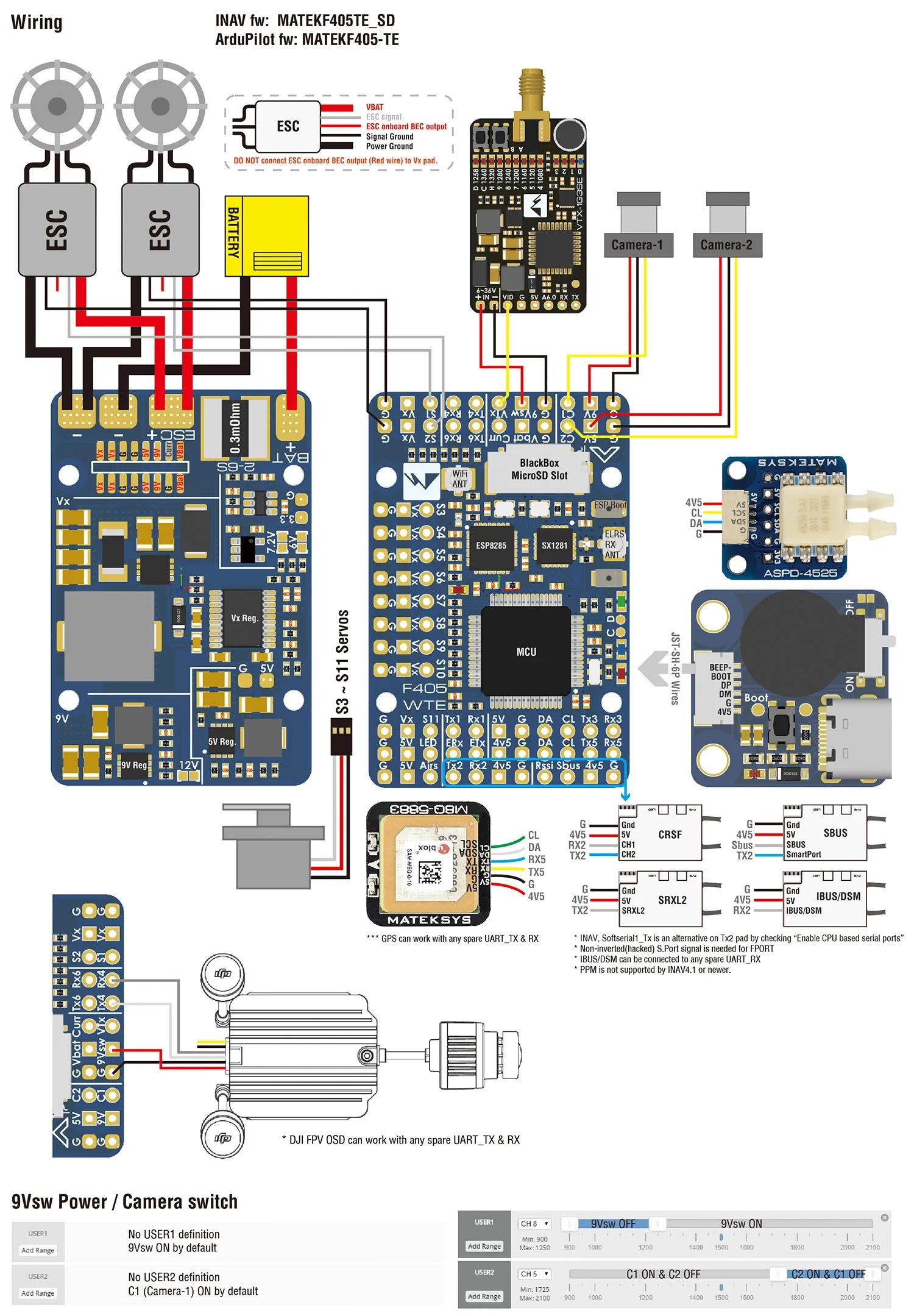
9V(12V) para interruptor de alimentación VTX
Firmware FC
-
ArduPilot: MatekF405-TE
-
INAV: MATEKF405TE_SD (no disponible en el configurador INAV 4.x)
PDB
-
Rango de voltaje de entrada: 6,8~30V (2~6S LiPo)
-
1x almohadillas de alimentación ESC
-
Divisor de voltaje de batería 1K:20K (Escala 2100 en INAV, BATT_VOLT_MULT 21.0 en ArduPilot)
-
Señor de corriente: 220 A, 3,3 V ADC (escala 150 en INAV, 66,7 A/V en ArduPilot)
-
Resistencia de detección: 90 A continuo, 220 A pico
Salida BEC 5V
-
Diseñado para controlador de vuelo, receptor, OSD, cámara, zumbador, tira LED 2812, zumbador, módulo GPS, AirSpeed
-
Corriente continua: 2 amperios, máx. 3 A
Salida BEC 9V /12V
-
Diseñado para transmisor de vídeo, cámara, cardán, etc.
-
Corriente continua: 2 amperios, máx. 3 A
-
Opción de 12 V con puente
-
para una salida estable de 9 V/12 V, el voltaje de entrada debe > voltaje de salida +1 V
Salida BEC Vx
-
Diseñado para servos
-
Voltaje ajustable, 5 V predeterminado, 6 V o 7,2 V mediante puente
-
Corriente continua: 8 amperios, máx. 10 A
-
para una salida Vx estable, el voltaje de entrada debe > voltaje Vx +1V
Salida BEC 3,3 V
-
Diseñado para módulo Baro / Compass y externo 3.Periféricos de 3V
-
Regulador lineal
-
Corriente continua: 200 mA
Físico
-
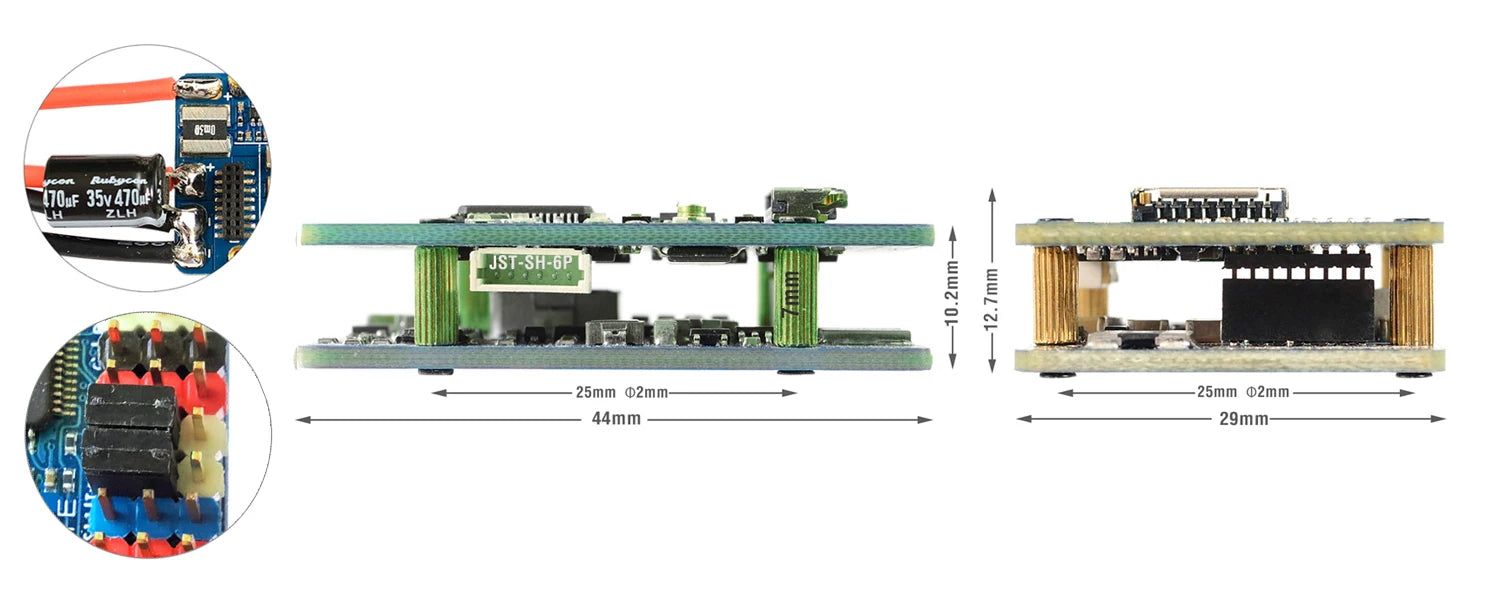
Montaje: 25 x 25 mm, Φ2 mm
-
Dimensiones: 44 x 29 x 12,7 mm
-
Peso: 22 g con adaptador USB/zumbador
Incluyendo
-
1x F405-WTE
-
1 extensor USB (tipo C)/bip (zumbador pasivo) + cable JST-SH-6P a JST-SH-6P de 20 cm para extensor USB.
-
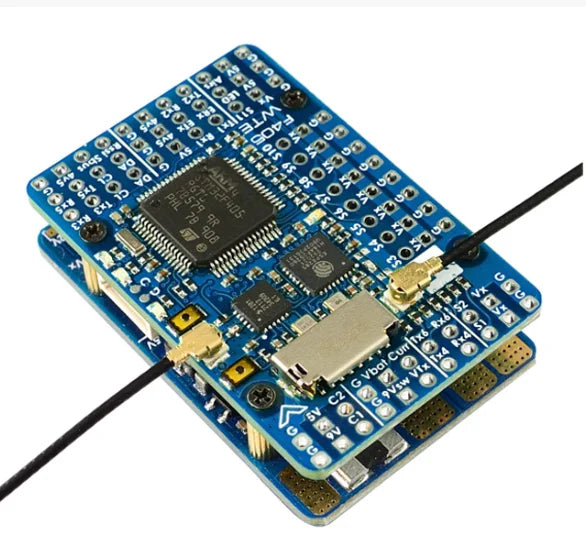
2x antenas IPEX-MHF1 2.4G
-
1x condensador Rubycon ZLH 35V 470uF
-
Dupont 2,54 pines (La placa se envía sin soldar)
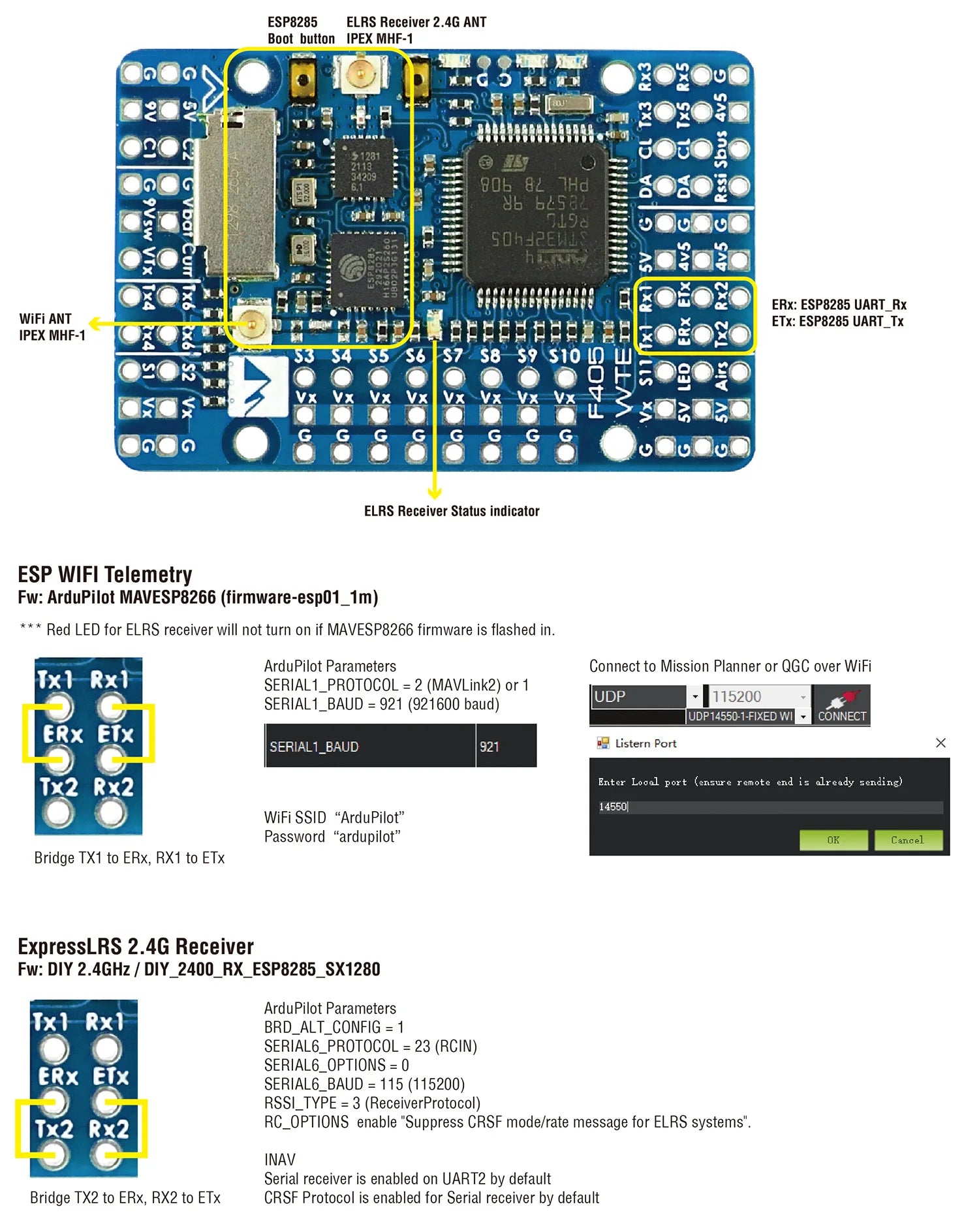
Telemetría wifi ArduPilot ESP8266
-
https://ardupilot.org/copter/docs/common-esp8266-telemetry.html
-
Herramienta: ESP_NodeMCU-PyFlasher.exe
-
Firmware: firmware-esp01_1m.bin
-
Flashing con ESP_NodeMCU-PyFlasher
-
Conecte el ESP8285(ETx, ERx) al adaptador USB-TTL, con ETx en F405-WTE conectado al Rx en el USB-TTL y ERx conectado al Tx del USB-TTL. Cablee 4v5 y GND de F405-WTE a 5V y GND del USB-TTL
-
Conecte el adaptador USB-TTL a la PC mientras mantiene presionado el botón de inicio ESP8285.
-
abre ESP_NodeMCU-PyFlasher
-
seleccione Puerto serie del módulo USB-TTL, cargue el firmware, seleccione “Salida dual (DOUT)” y “Sí.borra todos los datos“
-
haga clic en “Flash NodeMCU“
-
después de parpadear, apague y luego encienda el F405-WTE mediante USB o batería.
-
Espera unos segundos, busca el SSID de WiFi "ArduPilot" y la contraseña es "ardupilot"
-
Consejos: El LED rojo para el receptor ELRS no se encenderá si se actualiza el firmware MAVESP8266.
-
Receptor ExpressLRS 2.4G
-
ExpressLRS AUX1-AUX8 no son canales de resolución completa. https://www.expresslrs.org/2.0/software/switch-config/
-
Parpadeo a través de WiFi
-
Encienda el F405-WTE por USB, el LED del receptor (rojo) parpadeará lentamente al principio y, después de 30 segundos, debería parpadear rápidamente indicando que está en modo de punto de acceso WiFi.
-
Pasos más detallados, consulte esta página.
-
Objetivo: DIY 2,4 GHz / DIY_2400_RX_ESP8285_SX1280
-
-
Flash vía UART
-
Conecte el ESP8285(ETx, ERx) al adaptador USB-TTL, con ETx en F405-WTE conectado al Rx en el USB-TTL y ERx conectado al Tx del USB-TTL. Conecte 4v5 y GND de F405-WTE a 5V y GND del USB-TTL.
-
Conecte el adaptador USB-TTL a la PC mientras mantiene presionado el botón de inicio ESP8285.
-
Seleccione el objetivo DIY 2.4GHz / DIY_2400_RX_ESP8285_SX1280 y “
5039>UART” para Método de flasheo, configure su frase de vinculación y Opciones de firmware y una vez hecho, haga clic en Compilar y flashear.
-
Conexión UDP con configurador INAV a través de WiFi
-
Herramienta: ESP_NodeMCU-PyFlasher.exe
-
Firmware: MSPWifiBridge_ESP-01.bin compilado en base a github.com/Scavanger/MSPWifiBridge
-
Flashing con ESP_NodeMCU-PyFlasher
-
Conecte el ESP8285(ETx, ERx) al adaptador USB-TTL, con ETx en F405-WTE conectado al Rx en el USB-TTL y ERx conectado al Tx del USB-TTL. Cablee 4v5 y GND de F405-WTE a 5V y GND del USB-TTL
-
Conecte el adaptador USB-TTL a la PC mientras mantiene presionado el botón de inicio ESP8285.
-
abre ESP_NodeMCU-PyFlasher
-
seleccione Puerto serie del módulo USB-TTL, cargue el firmware, seleccione “Salida dual (DOUT)” y “Sí.borra todos los datos“
-
haga clic en “Flash NodeMCU“
-
después de parpadear, apague y luego encienda el F405-WTE mediante USB o batería.
-
Espera unos segundos, busca el SSID de WiFi “MSPWifiBridge”, y la contraseña es “123456789”
-
Si no hay reenvío automático a la página de configuración, vaya a http://192.168.4.1 manualmente. Datos de inicio de sesión estándar: Nombre de usuario: admin, Contraseña: 123456789
-
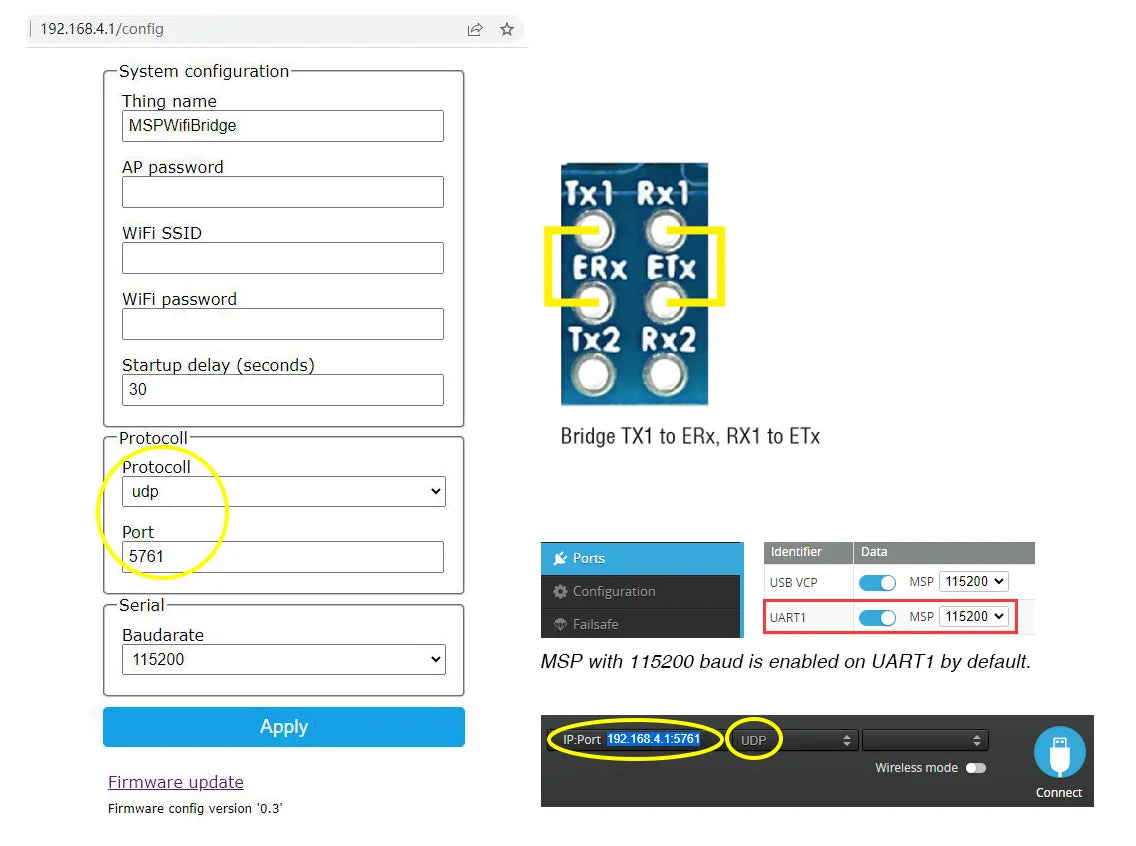
192.168.4.1/config Configuración del sistema Nombre de cosa MSPWifiBridge Contraseña de AP Ixl Rx| WiFi SSID ERx ETx Contraseña WiFi Tx2 Rx2 Retardo Staz (segundos 30 Protocolo Puente TX1 a erx, RXI a ETx Protocolo udp Puerto 5761 Puentes Identificador Datos USB VC?
Related Collections