Matek System H743 / MINI H743 controlador de vuelo-STM32H743VIT6 ICM20602 OSD integrado DPS310 PDB para piezas de Dron de carreras de control remoto FPV
Matek System H743 / MINI H743 controlador de vuelo-STM32H743VIT6 ICM20602 OSD integrado DPS310 PDB para piezas de Dron de carreras de control remoto FPV
MATEKSYS
No se pudo cargar la disponibilidad de retiro
ESPECIFICACIONES del controlador de vuelo Matek System H743 / MINI H743
Distancia entre ejes: Tornillos
Piezas/accesorios de actualización: Adaptador
Suministros de herramientas: Clase ensamblada
Parámetros técnicos: Valor 2
Tamaño: COMO DESCRIPCIÓN
Dispositivos/periféricos de control remoto: Controlador remoto
Edad recomendada: 12+años
Piezas y accesorios de RC: Controladores de velocidad
Cantidad: 1 pieza
Origen: China continental
Número de modelo: H743-MINI
Material: Metal
Atributos de tracción en las cuatro ruedas: Ensamblaje
Para tipo de vehículo: Helicópteros
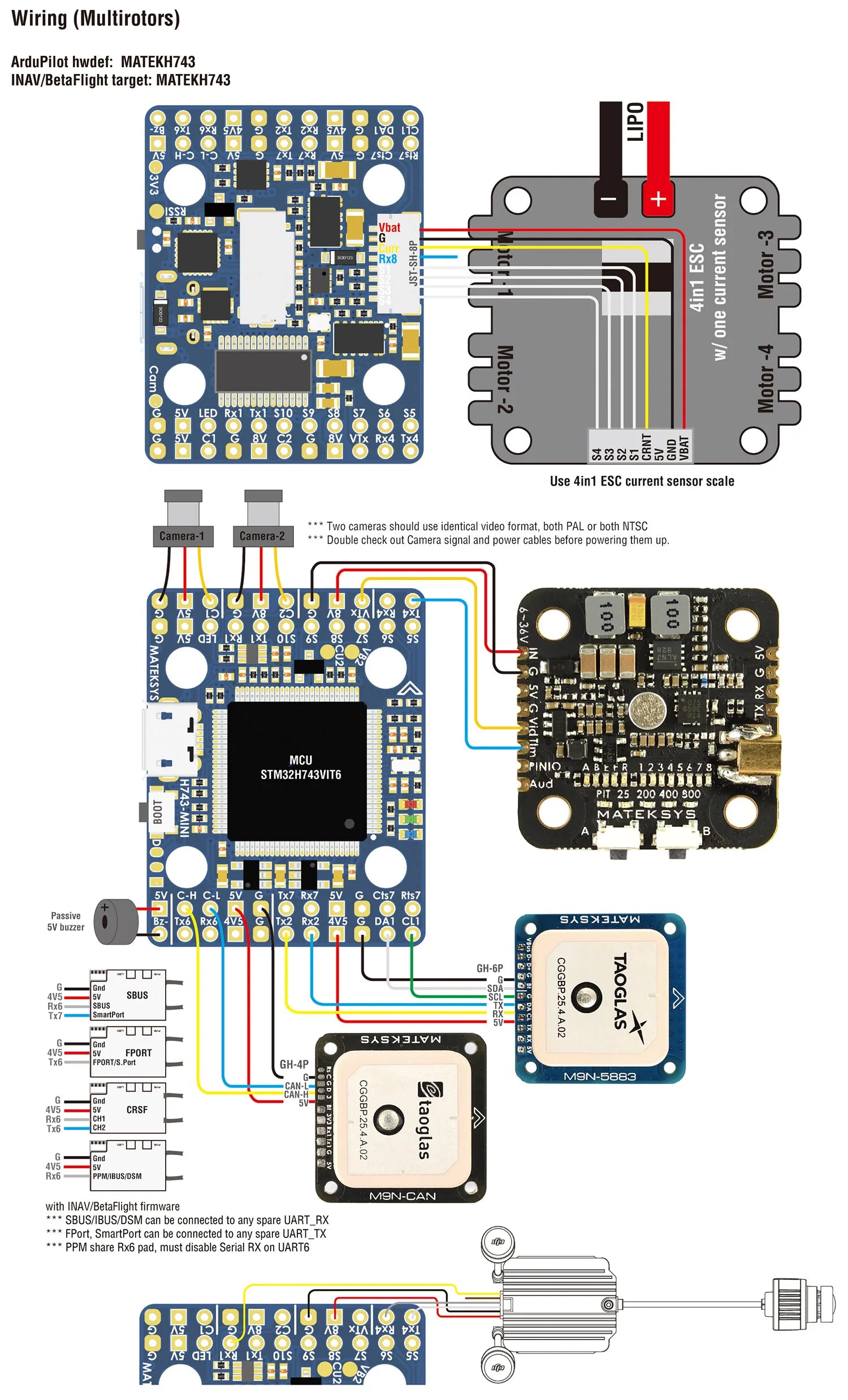
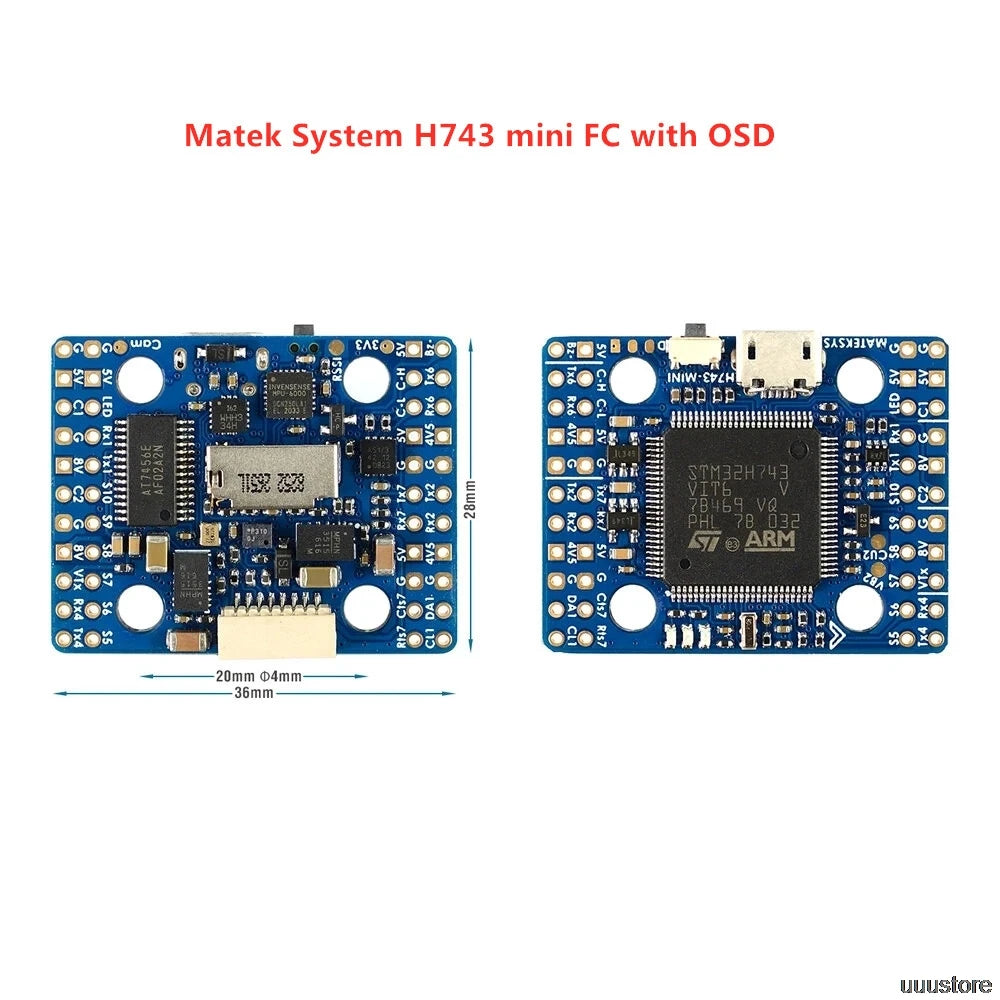
Matek System H743 MINI H743 Controlador de vuelo STM32H743VIT6 ICM20602 OSD DPS310 PDB incorporado para piezas de drones de carreras FPV RC
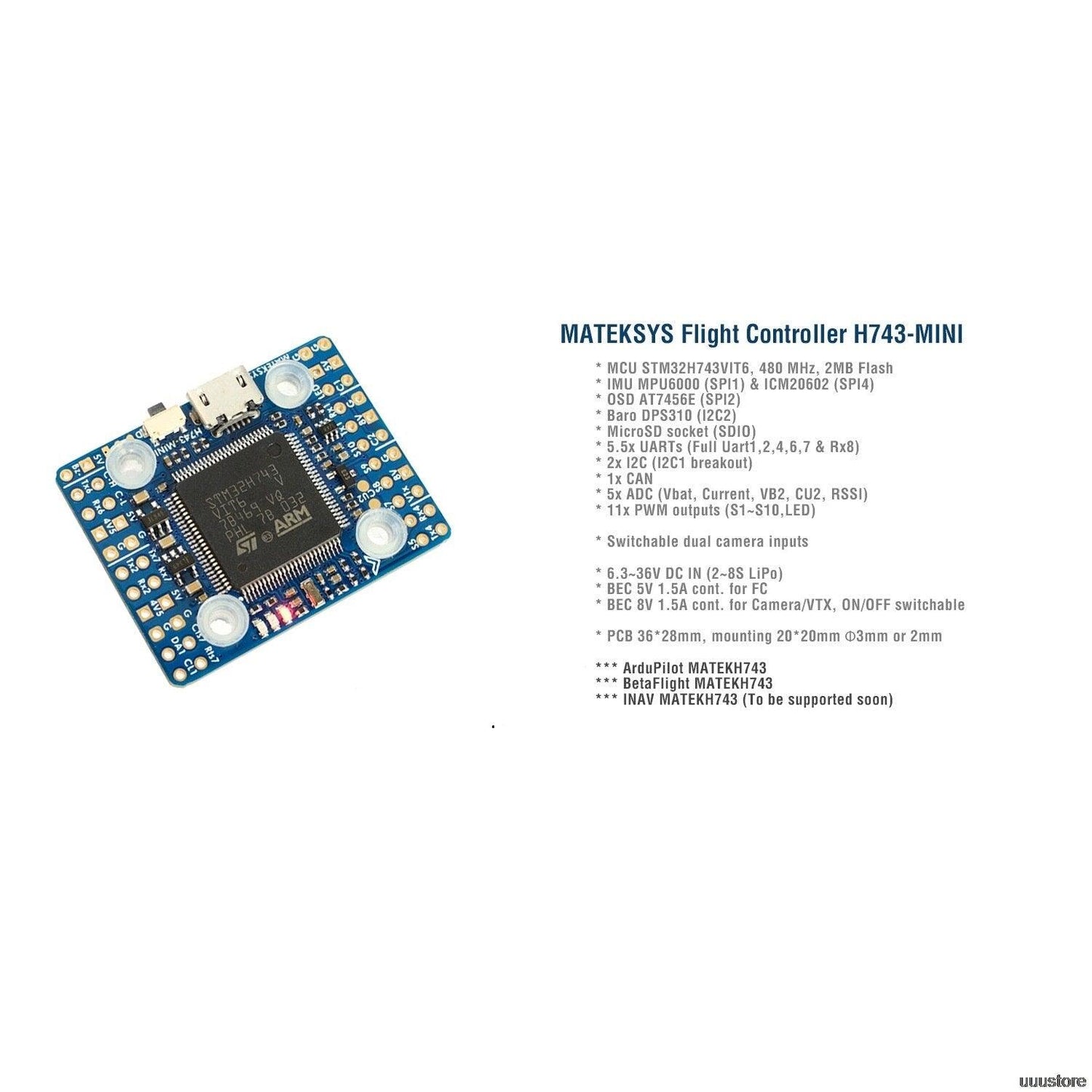
Especificaciones FC
- MCU: STM32H743VIT6, 480MHz, 1MB de RAM, 2MB de memoria flash
- IMU: MPU6000 (SPI1) y ICM20602 (SPI4)
- Baro: Infineon DPS310 (I2C2)
- OSD: AT7456E (SPI2)
- Caja negra: zócalo para tarjeta MicroSD (SDIO)
- 5,5x Uarts (1,2,4,6,7, Rx8)
- 11 salidas PWM (S1~S10, LED)
- 2x I2C (almohadillas I2C1/DA1 CL1, sin ruptura I2C2)
- 1x CAN (almohadillas C-H, C-L)
- 5x ADC (VBAT, corriente, RSSI, VB2, CU2)
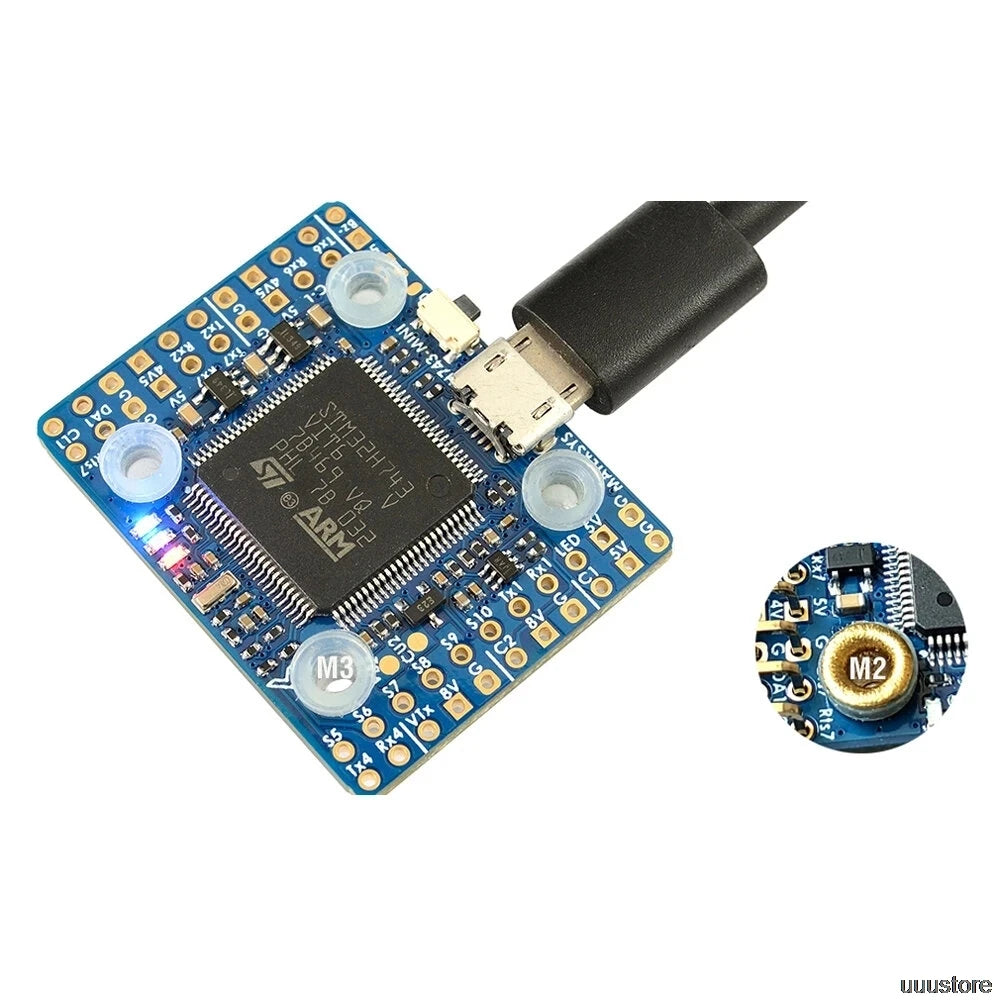
- 3 LED para ESTADO FC (azul, rojo) e indicador de 3,3 V (rojo)
- 1 conector JST-SH1.0_8 pines (Vbat/G/Curr/Rx8/S1/S2/S3/S4)
- Interruptor de entradas de cámara dual
- Interruptor de encendido/apagado de 8 V
Energía
- Entrada Vbat: 6,3~36V (2~8S LiPo)
- BEC: 5 V 1,5 A continuo. (Máx.2A)
- BEC: 8V 1,5A continuo. (Máx.2A), 8 V emite estables cuando Vbat>=10 V, 8 V genera el 80 % de Vbat cuando Vbat < 10 V
- LDO 3,3 V: 200 mA
- El pad VB2 admite máx. 69V (divisor de voltaje 1K:20K)
- Potencia estática: 200mA@5V with Betaflight, 150mA@5V with ArduPilot
Firmware FC
- ArduPilot(ChiBiOS): MATEKH743
- Vuelo Beta: MATEKH743
- INAV: MATEKH743 (se admitirá pronto)
Físico
- Montaje
- 20 x 20 mm/Φ3 mm con ojales de silicona
- 20 x 20 mm/Φ2 mm con ojales de silicona y latón
- Dimensiones: 36 x 28 x 6,5 mm
- Peso: 7g
Incluyendo
- 1x H743-MINI
- 6x arandelas de silicona M4 a M3
- 6x arandelas de latón M3 a M2
- 1 cable JST-SH1.0_8 pines, 5 cm
- 2x conectores JST-SH1.0_8pin
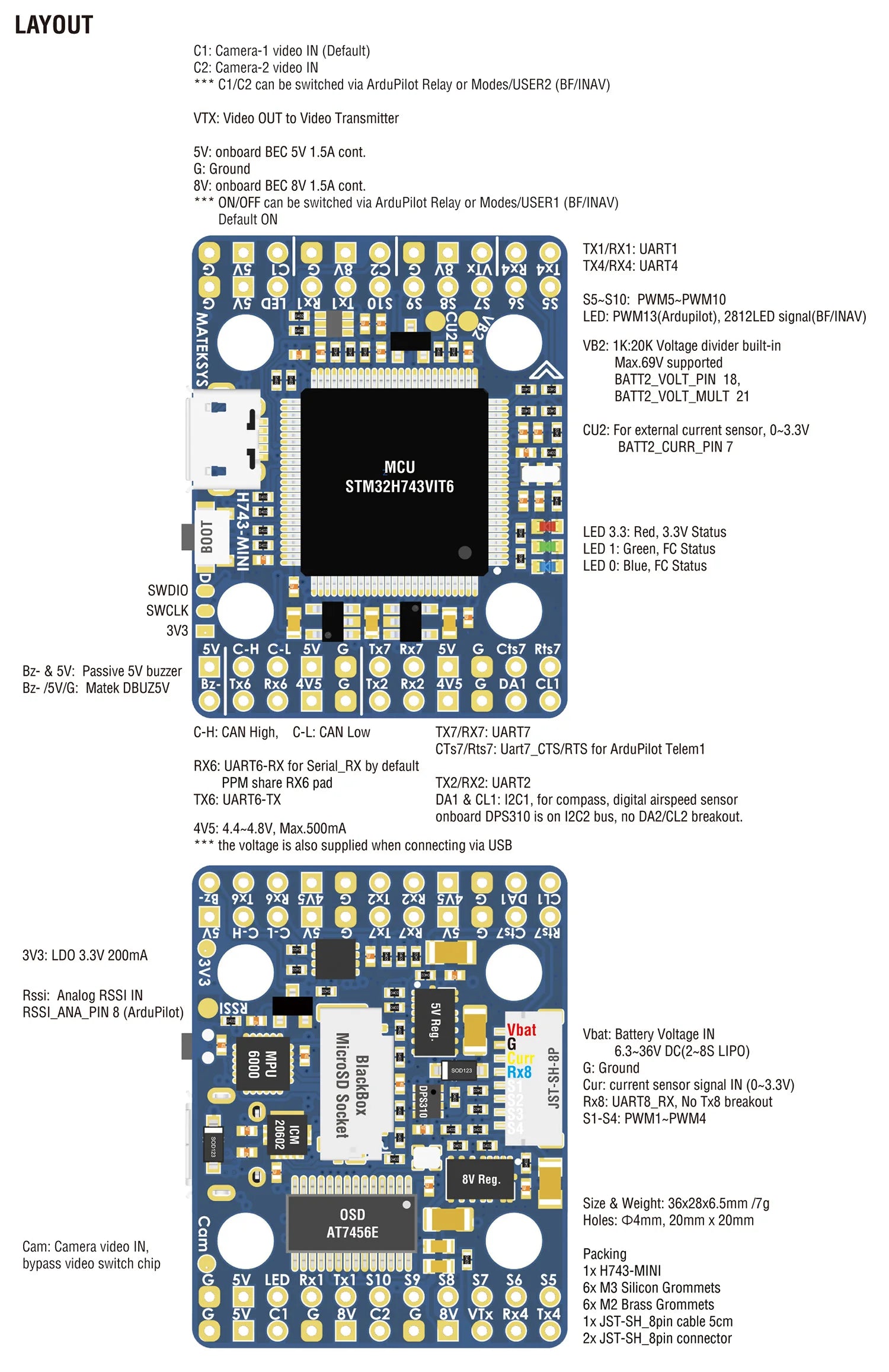
El modo C1 se puede cambiar usando la función Relé de ArduPilot o Modos/USUARIO2 (BFiINAV). De forma predeterminada, este modo está habilitado en TXI/RXI a través de UART1 a una velocidad de baudios de 8X. Además, cuando está en modo VX, el canal TXA/Rx4 del transmisor se comunica con el controlador de vuelo a través de UART4 a una velocidad de 31,25 kHz.
-

Related Collections