


Controlador de vuelo MATEKSYS H7A3-SLIM - ICM42688P - 30x30
Controlador de vuelo MATEKSYS H7A3-SLIM - ICM42688P - 30x30
MATEKSYS
No se pudo cargar la disponibilidad de retiro
El Controlador de Vuelo MATEKSYS H7A3-SLIM ofrece un alto rendimiento en un diseño compacto de 30x30mm. Cuenta con el MCU STM32H7A3RIT6, procesador Cortex-M7 a 280MHz, 1.4MB de RAM y 2MB de Flash. Con el IMU ICM42688P, barómetro SPL06-001, OSD AT7456E y Blackbox de 128MB Flash, proporciona datos precisos y amplio registro. El controlador incluye 6 UARTs, 11 salidas PWM, 1 I2C, 1 puerto CAN y 4 canales ADC. También tiene tres LEDs de estado, un puerto USB Tipo-C y una salida de 9V conmutada. Con un patrón de montaje de 30.5 x 30.5mm, agujeros de 4mm, grommets de 3mm y un peso de solo 7g, es perfecto para carreras FPV y vuelo libre. Se incluye un archivo 3D step para integración personalizada.
Características
- Pantalla en Pantalla
- Montaje 30x30
- Diseño Compacto
- Conectividad
- Ligero
Especificaciones
Especificaciones
- MCU: STM32H7A3RIT6, 280MHz Cortex-M7, 1.4MB RAM, 2MB Flash
- IMU: ICM42688P
- Baro: SPL06-001
- OSD: AT7456E
- Blackbox: 128MB Flash (1G-bit NAND)
- 6x Uarts (1,2,3,4, 5, 6) con inversión incorporada.
- 11x salidas PWM
- 1x I2C
- 1x CAN
- 4x ADC (VBAT, Corriente, VB2, Cur2)
- 3x LEDs para ESTADO del FC (Azul, Rojo) y indicador de 3.3V (Rojo)
- USB Tipo-C (USB2.0)
- 8 salidas PWM en conector 2x JST-SH1.0_8pin para 2x 4en1 ESC
- 1x conector JST-GH1.25_4pin (5V/CAN-H/CAN-L/G)
- Interruptor ON/OFF de salida de 9V
- El OSD de video digital es compatible con cualquier UART disponible
Potencia
- Entrada Vbat: 6~36V (2~8S LiPo)
- BEC: 5V 2A cont. (Máx. 3A)
- BEC: 9V 2A cont. (Máx. 3A)
- LDO 3.3V: Máx. 200mA
- No hay sensor de corriente integrado
- El pad ADC VB2 soporta Máx. 69V (divisor de voltaje: 1K:20K)
Firmware FC
- ArduPilot: MATEKH7A3 (4.6 o más nuevo)
- ArduPlane https://firmware.ardupilot.org/Plane/beta/MatekH7A3/
- ArduCopter &https://firmware.ardupilot.org/Copter/beta/MatekH7A3/
- Flasheo con STM32CubeProgrammer
Físico
- Montaje: 30.5 x 30.5mm, Φ4mm con Grommets Φ3mm
- Dimensiones: 36 x 36 x 5 mm
- Peso: 7g
- Paso 3D H7A3-SLIM_step.zip
Incluyendo
- 1x H7A3-SLIM
- 6x Grommets de silicona M4 a M3
- 2x JST-SH1.0_cable de 8 pines, 5 cm, & conectores de 8 pines
- 1x cable JST-GH-4P a JST-GH-4P para puerto CAN, 20 cm
Detalles

El controlador de vuelo MATEKSYS H7A3-SLIM utiliza un MCU STM32H7A3 con ICM42688P IMU y un puerto USB-C en un patrón de montaje de 30.5 mm.

El controlador de vuelo MATEKSYS H7A3-SLIM utiliza un diseño compacto de 30x30 con un puerto USB-C y almohadillas claramente etiquetadas para un cableado ordenado.

MATEKSYS H7A3-SLIM utiliza conectores duales JST-SH 1.0 de 8 pines más un puerto JST-GH de 4 pines y USB Tipo-C para un cableado ordenado y una fácil configuración.

MATEKSYS H7A3-SLIM utiliza almohadillas de soldadura y puertos claramente etiquetados para conexiones de video de cámara/VTx, UARTs, CAN y alimentación.
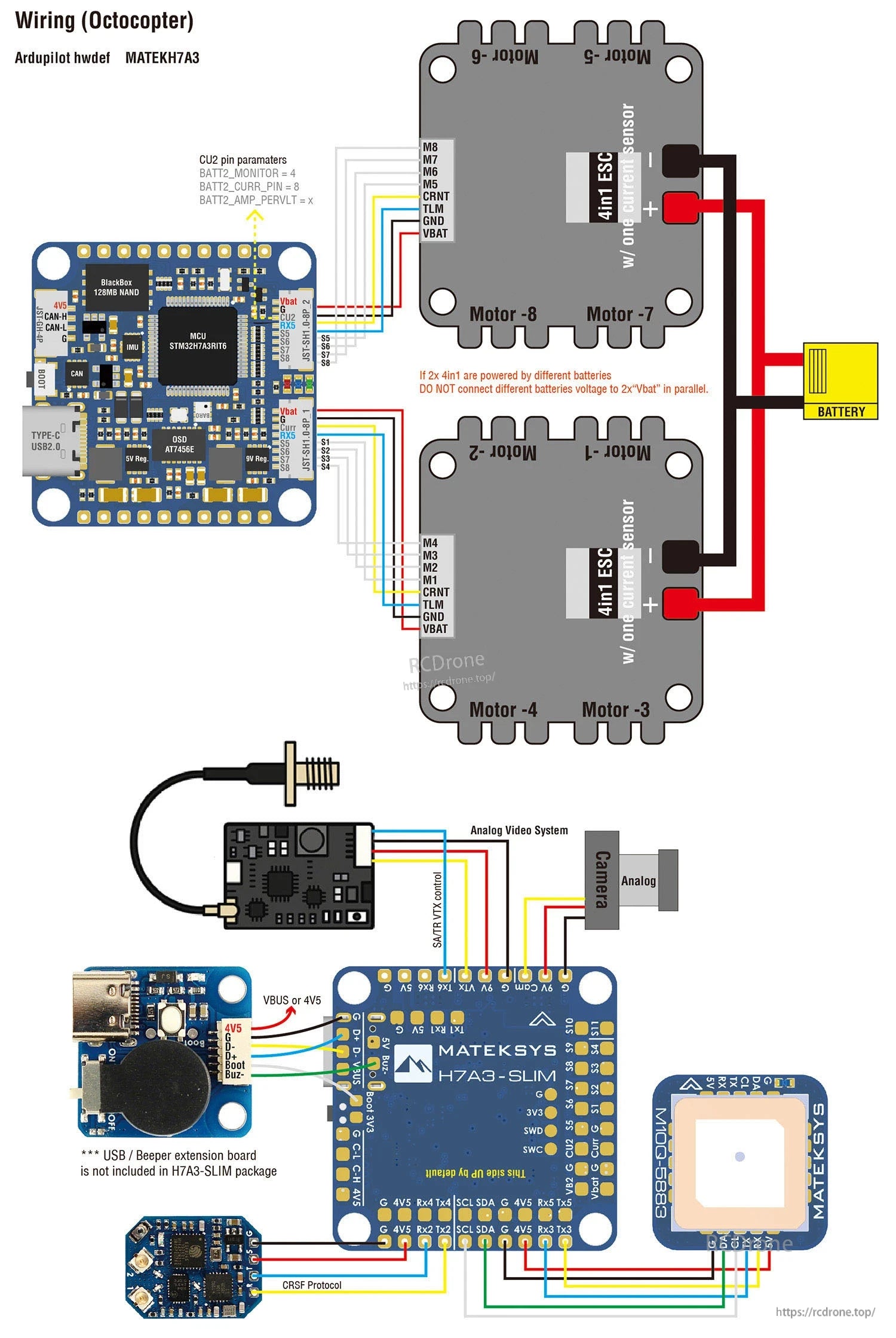
MATEKSYS H7A3-SLIM utiliza almohadillas claramente etiquetadas para conectar ESCs duales 4-en-1, alimentación VBAT, GPS, receptor y componentes de video analógico.

mapeo ArduPilot
| ArduPilot | ||||||
| PWM | S1 | PWM1 GPIO50 | I/O tolerante a 5 V | TIM1_CH2 | DMA/Bi-DShot | Grupo1 |
| S2 | PWM2 GPIO51 | I/O tolerante a 5 V | TIM1_CH3 | DMA/Bi-DShot | ||
| S3 | PWM3 GPIO52 | I/O tolerante a 5 V | TIM2_CH1 | DMA/Bi-DShot | Grupo2 | |
| S4 | PWM4 GPIO53 | I/O tolerante a 5 V | TIM2_CH2 | DMA/Bi-DShot | ||
| S5 | PWM5 GPIO54 | I/O tolerante a 5 V | TIM3_CH3 | DMA/Bi-DShot | Grupo3 | |
| S6 | PWM6 GPIO55 | I/O tolerante a 5 V | TIM3_CH4 | DMA/Bi-DShot | ||
| S7 | PWM7 GPIO56 | I/O tolerante a 5 V | TIM3_CH1 | DMA/Bi-DShot | ||
| S8 | PWM8 GPIO57 | I/O tolerante a 5 V | TIM3_CH2 | DMA/Bi-DShot | ||
| S9 | PWM9 GPIO58 | I/O tolerante a 5 V | TIM4_CH1 | DMA/DShot | Grupo4 | |
| S10 | PWM10 GPIO59 | I/O tolerante a 5 V | TIM4_CH2 | DMA/DShot | ||
| S11 | PWM11 GPIO60 | 5 V tolerante I/O | TIM16_CH1 | DMA/DShot | Grupo5 | |
| PWM1~PWM11 son capaces de Dshot y PWM.Sin embargo, mezclar Dshot y operación PWM normal para salidas está restringido a grupos, es decir, habilitar Dshot para una salida en un grupo requiere que TODAS las salidas en ese grupo estén configuradas y utilizadas como Dshot, en lugar de salidas PWM. Si se mezclan servo y motor en el mismo grupo, asegúrese de que este grupo funcione a la frecuencia PWM más baja de acuerdo con la especificación del servo. Es decir, si el servo soporta un máximo de 50Hz, el ESC debe funcionar a 50Hz en este grupo. |
||||||
| PINIO | interruptor de 9V | GPIO81 | RELAY1_PIN | 81 | ||
| ADC | pad Vbat | BATT_VOLTAGE_SENS | 6~36V | BATT_VOLT_PIN BATT_VOLT_MULT |
10 21.0 |
|
| pad de corriente | BATT_CURRENT_SENS | 0~3.3V | PINO_CTE_BAT AMP_BAT_PERVOLT |
11 X |
||
| Pad VB2 | SENS_VOLT_BAT2 | 0~69V | PINO_VOLT_BAT2 MULT_VOLT_BAT2 |
18 21.0 |
||
| Pad CU2 | SENS_CORRIENTE_BAT2 | 0~3.3V | BATT2_CURR_PIN BATT2_AMP_PERVLT |
8 X |
||
| I2C | SCL/SDA | I2C3 | I/O tolerante a 5V | en la placa Baro SPL06-001 | Dirección | 0x76 |
| Velocidad del aire digital I2C MS4525 DLVR-L10D |
ARSPD_BUS ARSPD_TYPE ARSPD_TYPE |
0 1 9 |
||||
| Magnetómetro | COMPASS_AUTODEC | 1 | ||||
| CAN | C-H/C-L | CAN2 | I/O tolerante a 5V | CAN | CAN_D1_PROTOCOL CAN_P1_DRIVER |
1 1 |
¿Puede GPS ¿Puede brújula ¿Puede sensor de velocidad del aire |
TIPO_GPS MÁSCARA_TIPO_BRÚJULA TIPO_ARSPD |
9 0 8 |
| UART | USB | USB | consola | PROTOCOLO_SERIAL0 | 2 | |
| TX1 RX1 | USART1 con DMA | I/O tolerante a 5 V | Telemetría | PROTOCOLO_SERIAL1 | 2 | |
| TX2 RX2 | USART2 con DMA | I/O tolerante a 5 V | Entrada RC/Receptor | PROTOCOLO_SERIAL2 | 23 | |
| TX3 RX3 | USART3 con DMA | I/O tolerante a 5 V | GPS | PROTOCOLO_SERIAL3 | 5 | |
| TX4 RX4 | UART4 sin DMA | I/O tolerante a 5 V | Repuesto | PROTOCOLO_SERIAL4 | -1 | |
| TX5 RX5 | UART5 sin DMA | I/O tolerante a 5 V | Repuesto | PROTOCOLO_SERIAL5 | -1 | |
| TX6 RX6 | USART6 sin DMA | I/O tolerante a 5 V | Repuesto | PROTOCOLO_SERIAL6 | -1 | |
ENTRADA RC
La entrada RC está configurada en el USART2(PROTOCOLO_SERIAL2).Admite todos los protocolos RC en serie. SERIAL2_PROTOCOL=23 por defecto.
- PPM no es compatible.
- CRSF requiere conexión Tx2 & Rx2, y establecer SERIAL2_OPTIONS en “0” (por defecto).
- SBUS/DSM/SRXL se conecta al pin Rx2, pero SBUS requiere que SERIAL2_OPTIONS se establezca en “3”.
- FPort requiere conexión a Tx2, y establecer SERIAL2_OPTIONS en “7”. Si la telemetría no funciona, intente establecer SERIAL7_OPTIONS = 135.
- SRXL2 requiere una conexión a Tx2 y proporciona telemetría automáticamente. Establezca SERIAL2_OPTIONS en “4”.
- Cualquier UART también se puede utilizar para conexiones del sistema RC en ArduPilot, y es compatible con todos los protocolos excepto PPM. Ver Sistemas de Control Remoto para más detalles.
Relé ArduPilot (PINIO)
- Salida de 9V activada por defecto
- PC13 PINIO1 SALIDA GPIO(81) // energía de 9V switche.g.
- FUNCIÓN_RELÉ1 1
- PIN_RELÉ1 81 // PINIO1 GPIO
- OPCIÓN_RC7 28 // Relé Encendido/Apagado, Use CH7 del Transmisor para establecer 9V ENCENDIDO/APAGADO
La función configurada se activará cuando el valor pwm del interruptor auxiliar sea superior a 1800. Se desactivará cuando el valor caiga por debajo de 1200.
Verifique el valor pwm enviado desde el transmisor cuando el interruptor esté alto y bajo utilizando la pantalla de Configuración Inicial >> Hardware Obligatorio >> Calibración de Radio.Si no sube más de 1800 ni baja de 1200, es mejor ajustar los puntos finales del servo en el transmisor.
Related Collections


