




Controlador de vuelo BetaFPV Matrix 1S Brushless AIO 3EN1/4EN1, STM32G473, ELRS 2.4G, 12A/18A
Controlador de vuelo BetaFPV Matrix 1S Brushless AIO 3EN1/4EN1, STM32G473, ELRS 2.4G, 12A/18A
BETAFPV
No se pudo cargar la disponibilidad de retiro
Resumen
El BetaFPV Matrix 1S Controlador de Vuelo Brushless es una plataforma de controlador de vuelo 1S whoop ofrecida en dos versiones: Matrix 1S 3IN1 (FC + ESC + receptor Serial ELRS 2.4GHz a bordo; sin OSD analógico) y Matrix 1S 4IN1 (agrega OSD de Betaflight y pads de soldadura para un VTX analógico externo). Utiliza el MCU STM32G473CEU6 y un diseño de placa estilo cruz, y está diseñado para una instalación sencilla en construcciones micro 1S.
Características Clave
- Dos arquitecturas: 3IN1 para construcciones digitales HD (con puerto VTX digital HD SH1.0-6Pin y conectores de motor) y 4IN1 para construcciones analógicas (con OSD y pads de soldadura para VTX analógico externo).
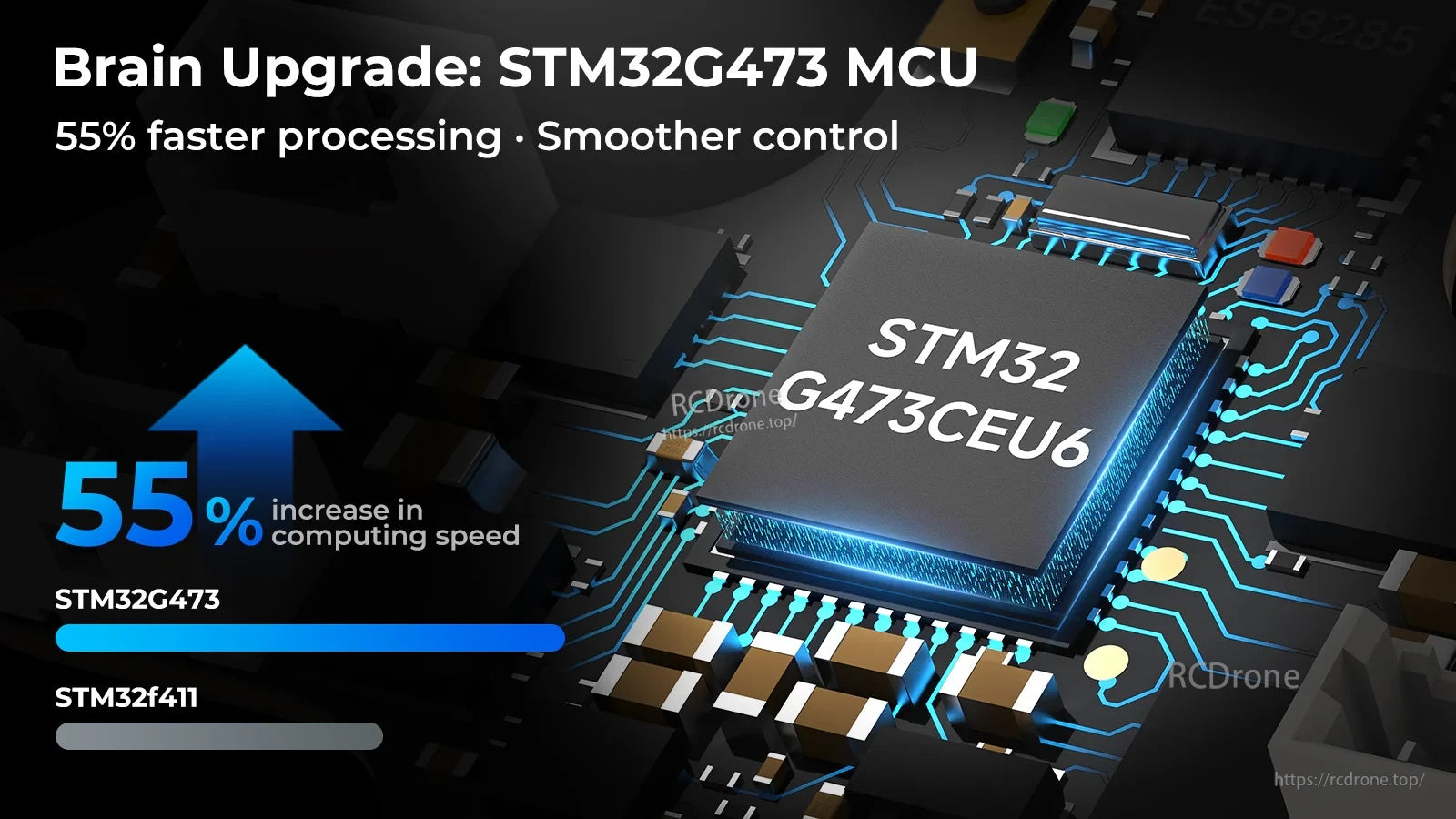
- MCU: STM32G473CEU6 (168MHz); declarado como un 55% más rápido en procesamiento que el F411.
- Salida ESC: 12A continuo, 18A pico; soporta DSHOT300 y DSHOT600.
- Nuevo BEC: 5V/3A; diseño de fuente de alimentación LDO de 3.3V independiente de IMU.
- Receptor Serial ELRS 2.4GHz a bordo (V3.4.3), protocolo CRSF.
- Nota de durabilidad: placa de 1 mm; características de instalación orientada sin soldadura en la versión 3EN1.
Especificaciones
Controlador de vuelo (FC)
| MCU | STM32G473CEU6 (168MHz) |
| Giroscopio | ICM42688P |
| Tasa de muestreo máxima del giroscopio (tabla de comparación) | ICM42688P, 8KHz |
| Memoria Blackbox | 16MB (también mostrado como 16M) |
| Sensor | Voltaje & corriente |
| BEC | 5V/3A |
| Fuente de alimentación IMU independiente | 3.3V LDO (LDO independiente de IMU) |
| ESC (a bordo) | 12A continuo |
| RX | Serial ELRS 2.4GHz (V3.4.3) |
| Puerto USB | SH1.0-4Pin |
| Conector de batería | BT2.0 |
| Conector de motor | JST1.25-3Pin (también mostrado como JST1.25) |
| Tamaño de montaje | 25.5mm x 25.5mm |
Entrada/Salida específica de la versión
| UART (3IN1) | UART 1 (Solo RX/SBUS), UART 2 (Libre), UART 3 (Para RX), UART 4 (Libre/HD MSP) |
| UART (4IN1) | UART 1 (Para VTX), UART 2 (Libre), UART 3 (Para RX), UART 4 (NINGUNO) |
| OSD | AT7456E (solo versión 4IN1) |
| Puerto VTX digital HD | SH1.0-6Pin (solo versión 3IN1) |
Peso
| 3IN1 | 3.8±0.1g (conector de batería excluido); 4.2±0.1g (conector de batería incluido) |
| 4IN1 | 3.6±0.1g (conector de batería excluido); 4.6±0.1g (conector de batería incluido) |
ESC
| Entrada de energía | Solo 1S |
| Corriente | 12A continuo, 18A pico |
| Protocolo de señal digital | DSHOT300, DSHOT600 |
| Firmware de ESC | A_X_5_96_v0.19.2.hex para firmware BB51 Bluejay |
Tabla de Comparación (como se proporciona)
| Matrix 1S 3IN1 | Matrix 1S 4IN1 | F4 1S 5A AIO | |
| MCU | STM32G473CEU6 | STM32F411CEU6 | |
| Frecuencia de MCU | 168MHz | 108MHz | |
| Gyro, tasa de muestreo máxima | ICM42688P, 8KHz | BMI270, 3.2KHz | |
| ESC | 12A continuo | 1S, 5A | |
| Memoria Blackbox | 16M | 8M | |
| OSD | - | Betaflight OSD: AT7456E | |
| RX | ELRS 2.4GHz en placa | ||
| Conector del motor | JST1.25 | ||
| Peso | 3.8g | 3.6g | 3.64g |
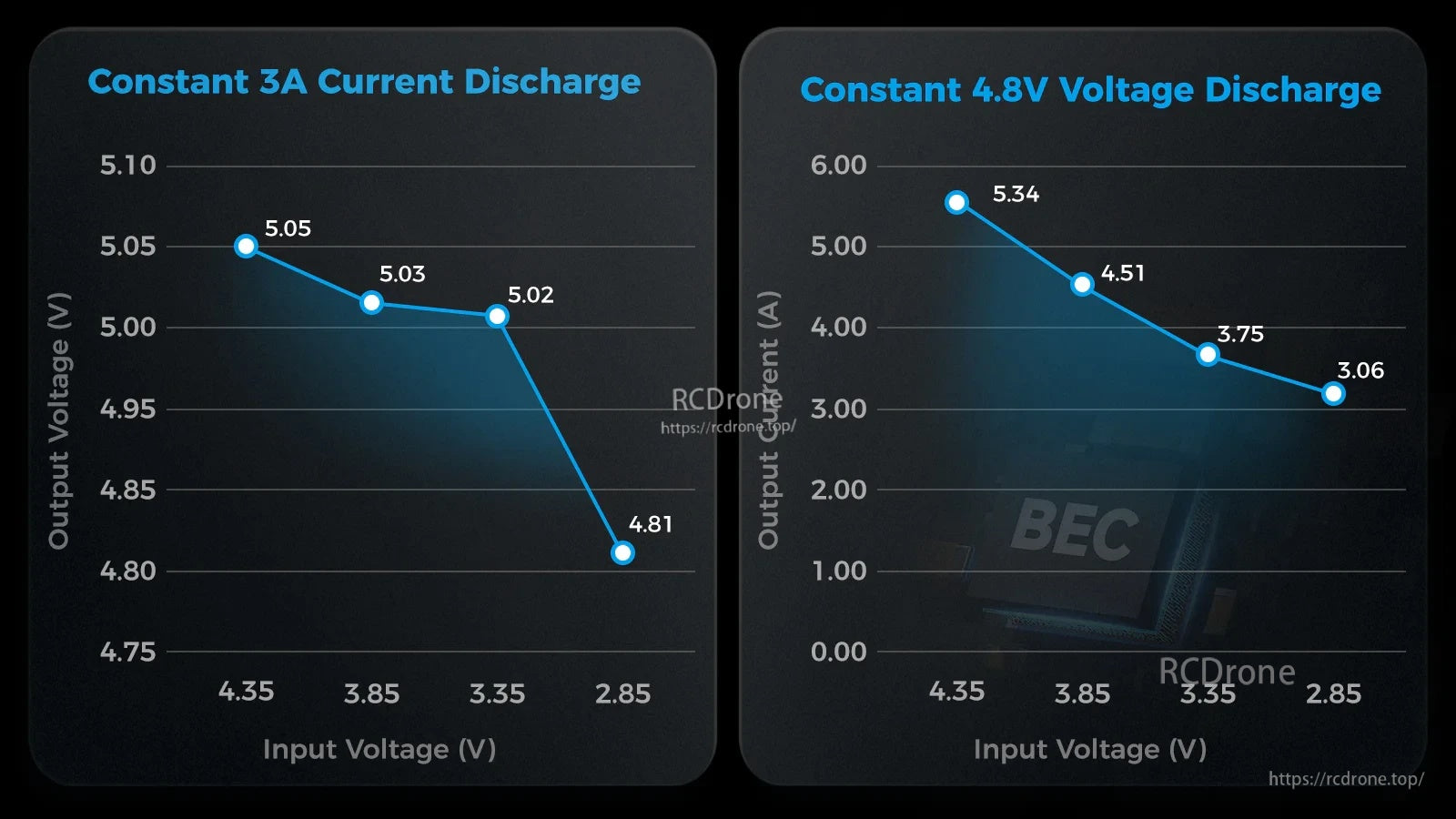
Datos de prueba BEC (como se muestra)
- Descarga de corriente constante de 3A: Entrada 4.35V → Salida 5.05V; 3.85V → 5.03V; 3.35V → 5.02V; 2.85V → 4.81V
- Descarga de voltaje constante de 4.8V: Entrada 4.35V → Salida 5.34A; 3.85V → 4.51A; 3.35V → 3.75A; 2.85V → 3.06A
Puertos & Notas de configuración (de diagramas)
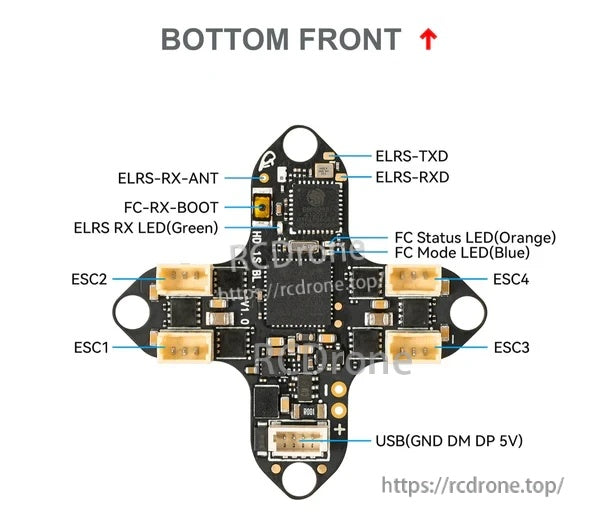
- Pinout USB mostrado: USB (GND, DM, DP, 5V).
- Las etiquetas de la placa 3EN1 mostradas incluyen: RX3, RX2, TX2, TX3; BATT-, BATT+(1S), 5V, GND; SBUS (RX1), RX4, TX4; LED; ELRS-RX-ANT; ELRS-TXD, ELRS-RXD; FC-RX-BOOT; LED RX ELRS (Verde); LED de estado FC (Naranja); LED de modo FC (Azul); ESC1/ESC2/ESC3/ESC4.
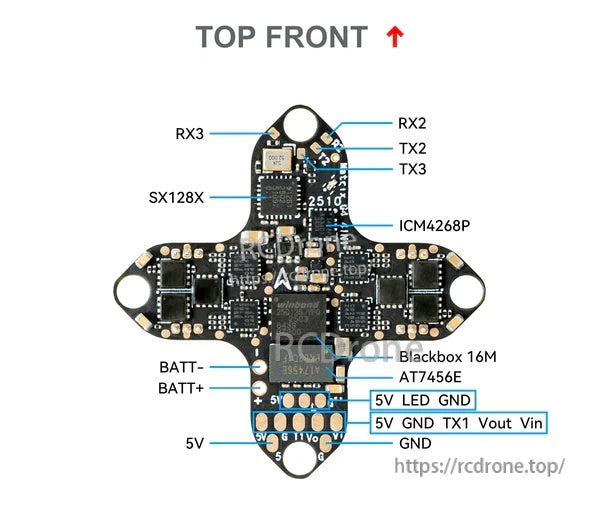
- Las etiquetas de la placa 4EN1 mostradas incluyen: SX128X; ICM42688P; Blackbox 16M; AT7456E; ELRS-RX-ANT; ELRS-TXD, ELRS-RXD; ESP8285; STM32G473; FC-RX-BOOT; LED de estado FC; LED de modo FC; ESC1/ESC2/ESC3/ESC4; además de etiquetas de pad que incluyen 5V/LED/GND y 5V/GND/TX1/Vout/Vin.
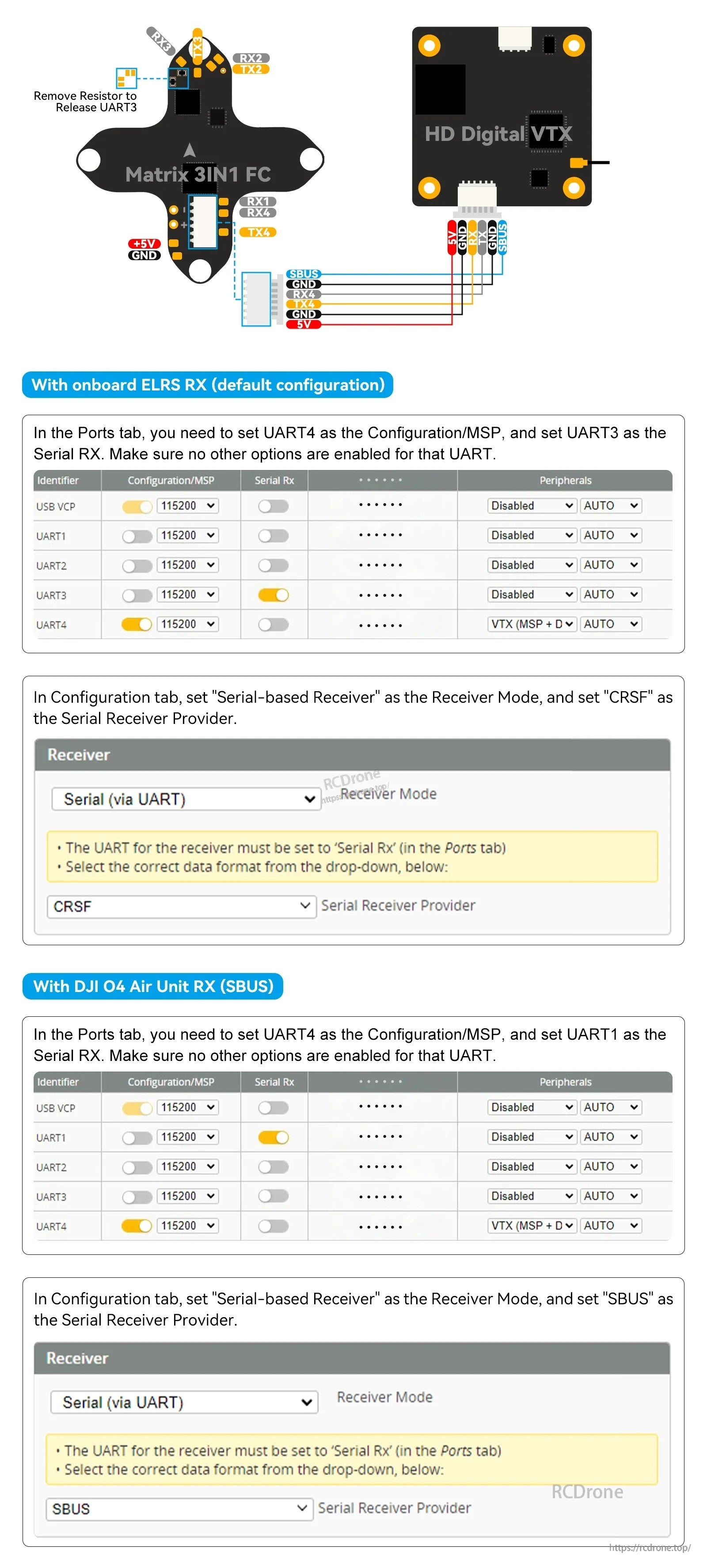
Configuración de puertos de Betaflight mostrada (3EN1)
- Con RX ELRS a bordo (predeterminado): configurar UART4 a Configuración/MSP y UART3 a RX Serial (sin otras opciones habilitadas para UART3). Modo de receptor: Receptor basado en Serial; Proveedor de receptor Serial: CRSF.
- Con RX de la unidad aérea DJI O4 (SBUS): configurar UART4 a Configuración/MSP y UART1 a RX Serial (sin otras opciones habilitadas para UART1). Modo del receptor: Receptor basado en serie; Proveedor de receptor serie: SBUS.
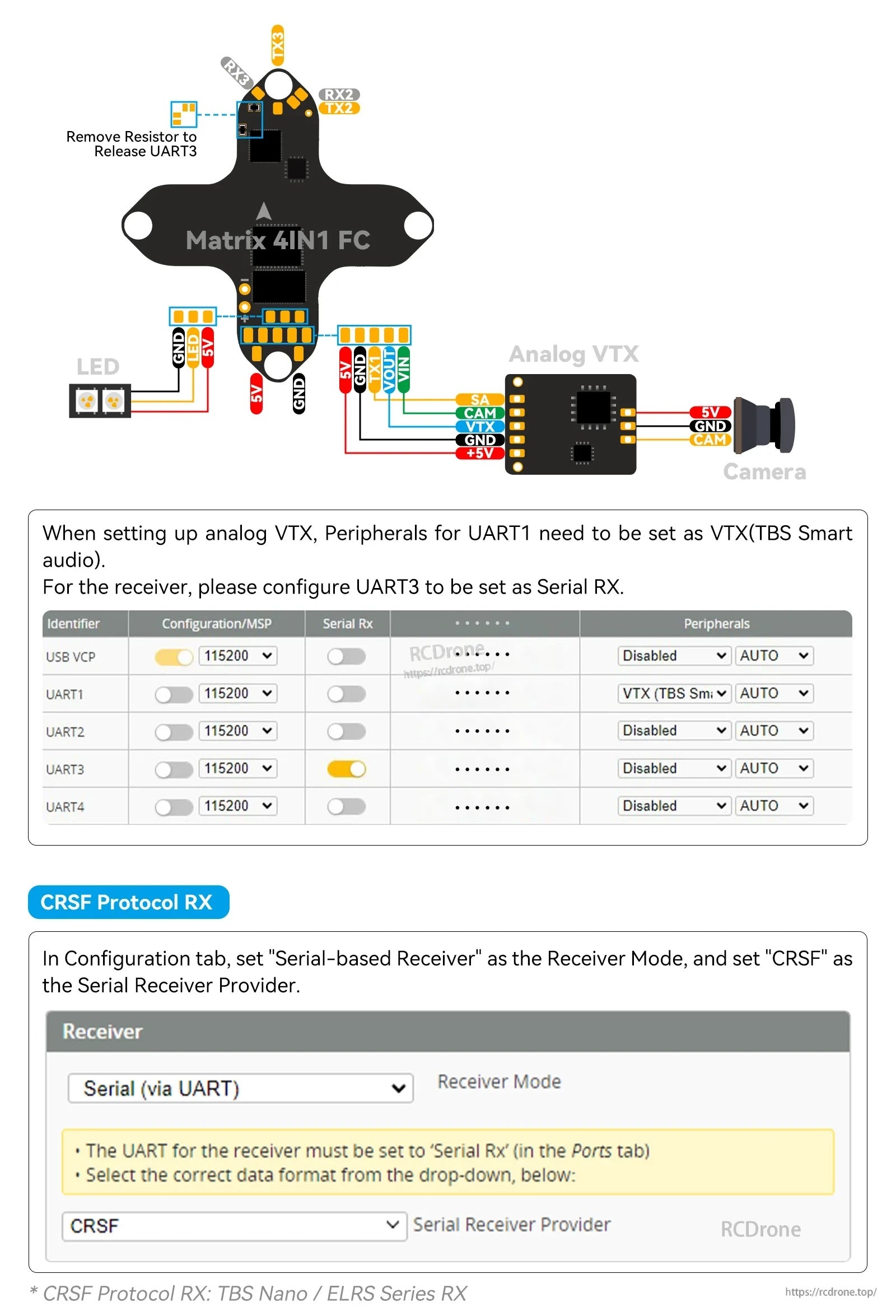
Configuración de puertos de Betaflight mostrada (4IN1)
- Al configurar VTX analógico: configure los periféricos para UART1 a VTX (TBS Smart audio).
- Para el receptor: configure UART3 como RX serie.
- Nota del protocolo CRSF RX mostrada: TBS Nano / RX de la serie ELRS.
Firmware
- Firmware de FC (3IN1): Betaflight_4.5.1_BETAFPVG473
- Firmware de FC (4IN1): Betaflight_4.5.2_BETAFPVG473_V2
- Base de firmware de ESC (BB51 Bluejay): A_X_5_96_v0.19.2.hex (soporta DSHOT300/DSHOT600; menciona opciones de frecuencia PWM fija de 24KHz/48KHz/96KHz y melodías de inicio personalizadas)
Importante: A partir del 5 de enero de 2026, se indica que el FC 3IN1 se enviará con un giroscopio BMI270. Verifique la versión del giroscopio antes de flashear el firmware. El Matrix 1S 3IN1 y 4IN1 requieren firmware diferente.
Nota: Evite flashear el firmware del ESC con un intervalo más corto; se indica que esto puede aumentar la posibilidad de paradas y dañar el controlador de vuelo.
Manuales & Descargas
- Firmware 3EN1 + volcado CLI: https://support.betafpv.com/hc/en-us/articles/41037090524697-Firmware-for-Matrix-1S-Brushless-Flight-Controller-3IN1-HD
- Firmware 4EN1 + volcado CLI: https://support.betafpv.com/hc/en-us/articles/48215862783769-Firmware-for-Matrix-1S-Brushless-Flight-Controller-4IN1
- Notas de la versión Betaflight 4.5.1: https://github.com/betaflight/betaflight/releases/tag/4.5.1
- Notas de la versión Betaflight 4.5.2: https://github.com/betaflight/betaflight/releases/tag/4.5.2
- Proyecto Bluejay: https://github.com/bird-sanctuary/bluejay
- Versiones de Bluejay: https://github.com/bird-sanctuary/bluejay/releases
- Configurador ESC: https://preview.esc-configurator.com/
- BLHeliSuite16714903: https://github.com/4712/BLHeliSuite/releases/tag/16714903
- Guía de flasheo de firmware ELRS: https://support.betafpv.com/hc/en-us/articles/4404231679129-How-to-Flash-Firmware-of-ELRS-RX-TX
Qué incluye
Paquete del Controlador de Vuelo Sin Escobillas Matrix 1S (3EN1)
- 1 * Controlador de Vuelo Sin Escobillas Matrix 1S (3EN1)
- 1 * Adaptador Tipo-C a SH1.0
- 1 * Cable Adaptador SH1.0-4Pin
- 1 * Cable Adaptador SH1.0-6Pin
- 4 * M1.2*4 Tornillos autorroscantes
- 4 * M1.4*5 Tornillos autorroscantes
- 4 * Bolas amortiguadoras
Controlador de vuelo sin escobillas Matrix 1S (4IN1) paquete
- 1 * Controlador de vuelo sin escobillas Matrix 1S (4IN1)
- 1 * Adaptador de Tipo-C a SH1.0
- 1 * Cable adaptador SH1.0-4Pin
- 4 * M1.2*4 Tornillos autorroscantes
- 4 * M1.4*5 Tornillos autorroscantes
- 4 * Bolas amortiguadoras
Atención
- Diseñado para principiantes y pilotos recreativos, el Matrix FC utiliza una placa de 1 mm para durabilidad y está diseñado para una fácil instalación.
- Los controladores de vuelo están cubiertos por defectos de fabricación. Los problemas que surjan de errores del usuario, daños físicos por accidentes, daños durante la instalación o desmontaje, modificaciones, picos de energía, incendios eléctricos o exposición al agua no están cubiertos.
Para preguntas de compatibilidad (selección 3IN1 vs 4IN1, cableado o firmware), contacte al soporte en https://rcdrone.top/ o [email protected].
Detalles

Elija entre la placa 3IN1 para construcciones digitales HD y la opción 4IN1 que añade soporte para Betaflight OSD y VTX analógico.


El BEC actualizado de 5V/3A se caracteriza por una salida estable a través de voltajes de entrada típicos de 1S.

Los conectores sin soldadura simplifican las instalaciones, con un puerto VTX digital HD dedicado y conectores de motor enchufables.

Para construcciones analógicas, la versión 4IN1 proporciona almohadillas de soldadura para cablear un VTX analógico externo.

Las notas de configuración cubren el mapeo de puertos común de Betaflight para construcciones digitales HD y el receptor Serial ELRS a bordo.
La guía de configuración se centra en el cableado de VTX analógico y la configuración CRSF para el receptor Serial ELRS a bordo.

Los accesorios incluidos permiten una configuración y una instalación rápida en el banco, con un adaptador USB, cable y hardware de montaje.

Related Collections





