

Motor MUWEIDU K12060 24V 60W DC sin escobillas FOC con codificador de 18 bits, RS485/CAN, 115rpm
Motor MUWEIDU K12060 24V 60W DC sin escobillas FOC con codificador de 18 bits, RS485/CAN, 115rpm
MUWEIDU
No se pudo cargar la disponibilidad de retiro
Descripción
MUWEIDU El motor K12060 es un motor de corriente continua sin escobillas motor servo (motor de corriente continua sin escobillas de la serie K de media a alta velocidad) con diseño de accionamiento eléctrico integrado (controlador incorporado) y un encoder magnético. Soporta control de velocidad/posición y comunicación RS485 o CAN, y está diseñado para juntas robóticas y de automatización compactas e integradas.
Características Clave
- Motor servo FOC de alto rendimiento
- Diseño de accionamiento eléctrico integrado: controlador y codificador magnético incorporados
- Diseño integrado / ligero / de alta precisión / alto par
- Precisión del codificador mejorada de 14 bits a 18 bits
- Par de arrastre del motor optimizado
- Entrada PWM soportada
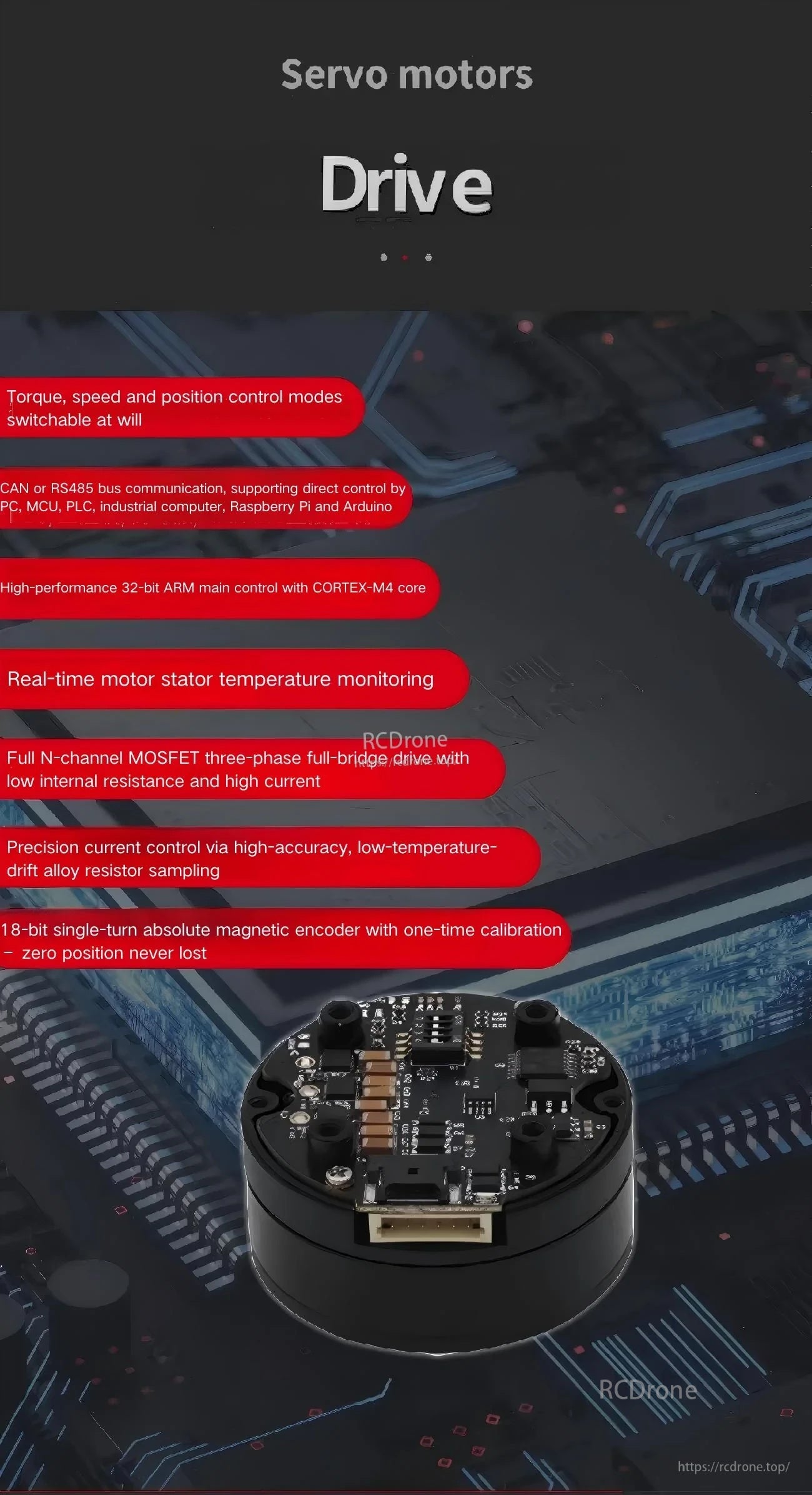
- Modos de control de par, velocidad y posición intercambiables a voluntad
- Comunicación por bus CAN o RS485; soporta control directo por PC, MCU, PLC, computadora industrial, Raspberry Pi y Arduino
- Control principal de alto rendimiento de 32 bits ARM con núcleo CORTEX-M4
- Monitoreo en tiempo real de la temperatura del estator del motor
- Conducción de puente completo trifásico N-channel MOSFET con baja resistencia interna y alta corriente
- Control de corriente de precisión a través de muestreo de resistor de aleación de alta precisión y bajo desplazamiento térmico
- Encoder magnético absoluto de 18 bits de una sola vuelta con calibración única; la posición cero nunca se pierde
- Diseño ligero: estructura plana con material de aluminio de grado aeronáutico
- Salida de alto par: rotor exterior emparejado con imanes de neodimio hierro boro
- Diseño de producto de estándar ultra alto
Especificaciones
| Modelo | K12060 |
| Tensión nominal | 24V |
| Corriente nominal | 4A |
| Poder máximo | 60W |
| Par nominal | 5N.m |
| Par máximo | 10N.m |
| Velocidad Calificada | 115rpm |
| Encoder | 18bit |
| Inercia del Rotor | 5500gcm^2 |
| Monitoreo de Temperatura del Motor | SÍ |
| Modos de Control | Velocidad/Posición |
| Protocolo de Comunicación | RS485 o CAN |
| Dimensiones Generales | Phi120mm x 49mm |
| Peso | 1147g |
Definición de Interfaz
- SWITCH ID
- CAN/RS485
| B/L | RS485-B o CAN-L |
| A/H | RS485-A o CAN-H |
| V- | Fuente de Alimentación Negativa |
| V- | Fuente de Alimentación Negativa |
| V+ | Fuente de Alimentación Positiva |
| V+ | Fuente de Alimentación Positiva |
| T | Transmisor UART |
| R | Receptor UART |
| G | GND de Señal |
Aplicaciones
- Robots Humanoides
- Brazos Robóticos
- Exoesqueletos
- Robots Cuadrúpedos
- Vehículos AGV
- Robots ARU
- Robot de Inspección
- Cámara de Mano
- LiDAR
- Soporte Gimbal
Para orientación de integración y preguntas de pre-venta (cableado de comunicación, modos de control y documentación), contacte [email protected] or visite https://rcdrone.top/ .
Manuales
Detalles

Un motor servo FOC de la serie K compacto, diseñado para juntas robóticas integradas, que combina el motor, controlador y el encoder en una sola carcasa.

El diseño de accionamiento eléctrico integrado reduce el cableado y ahorra espacio al combinar el motor, la electrónica del controlador y el encoder magnético.
Cambie entre control de torque, velocidad y posición, con comunicación CAN o RS485 para PC, MCU, PLC o controladores embebidos.

El etiquetado de la interfaz clara incluye un interruptor de ID y pines dedicados para conexiones de alimentación, bus CAN/RS485 y señales UART.

Las herramientas basadas en PC soportan la sintonización de parámetros, pruebas y actualizaciones de firmware a través de múltiples modos de control.

Bien adecuado para construcciones de automatización y robótica, como plataformas de inspección, estabilización de cámaras, LiDAR y pods de cardán.
Related Collections

