

MUWEIDU K4020 (25/40T) Motor Servo DC Sin Escobillas 12V, Codificador 18bit, RS485/CAN, 65g
MUWEIDU K4020 (25/40T) Motor Servo DC Sin Escobillas 12V, Codificador 18bit, RS485/CAN, 65g
MUWEIDU
No se pudo cargar la disponibilidad de retiro
Descripción
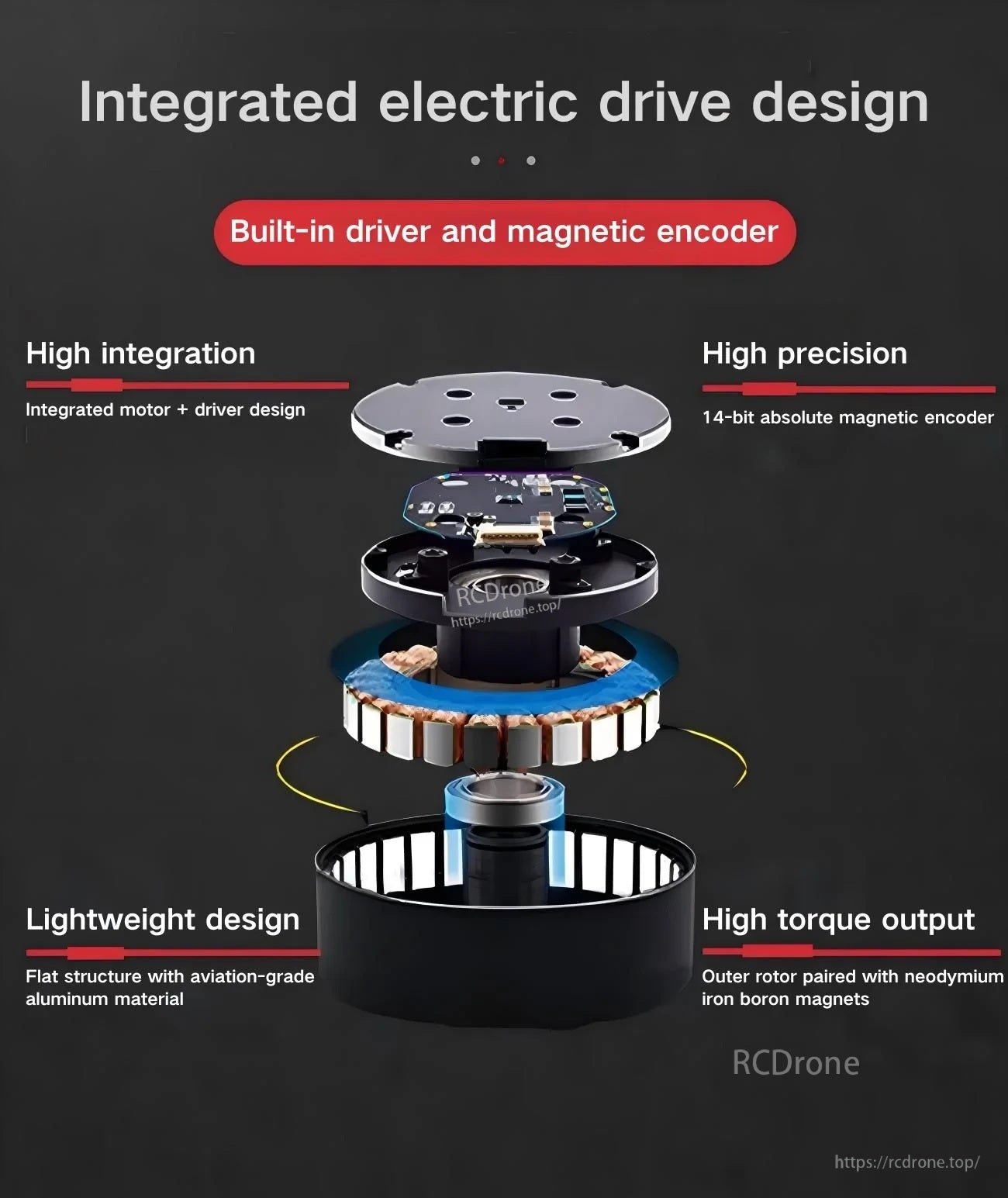
MUWEIDU El motor K4020 es un motor de corriente continua sin escobillas de velocidad media a alta de la serie K motor servo con un diseño de accionamiento eléctrico integrado (controlador y codificador magnético incorporados). Soporta control de velocidad/posición y proporciona comunicación RS485 o CAN para integraciones en robótica y automatización.
Características Clave
- Motor servo FOC de alto rendimiento
- Diseño integrado de motor + controlador
- Encoder magnético incorporado (especificación: 18 bits); la actualización de precisión del encoder se refiere de 14 bits a 18 bits
- Monitoreo de temperatura del motor: SÍ
- Par de arrastre del motor optimizado
- Entrada PWM soportada
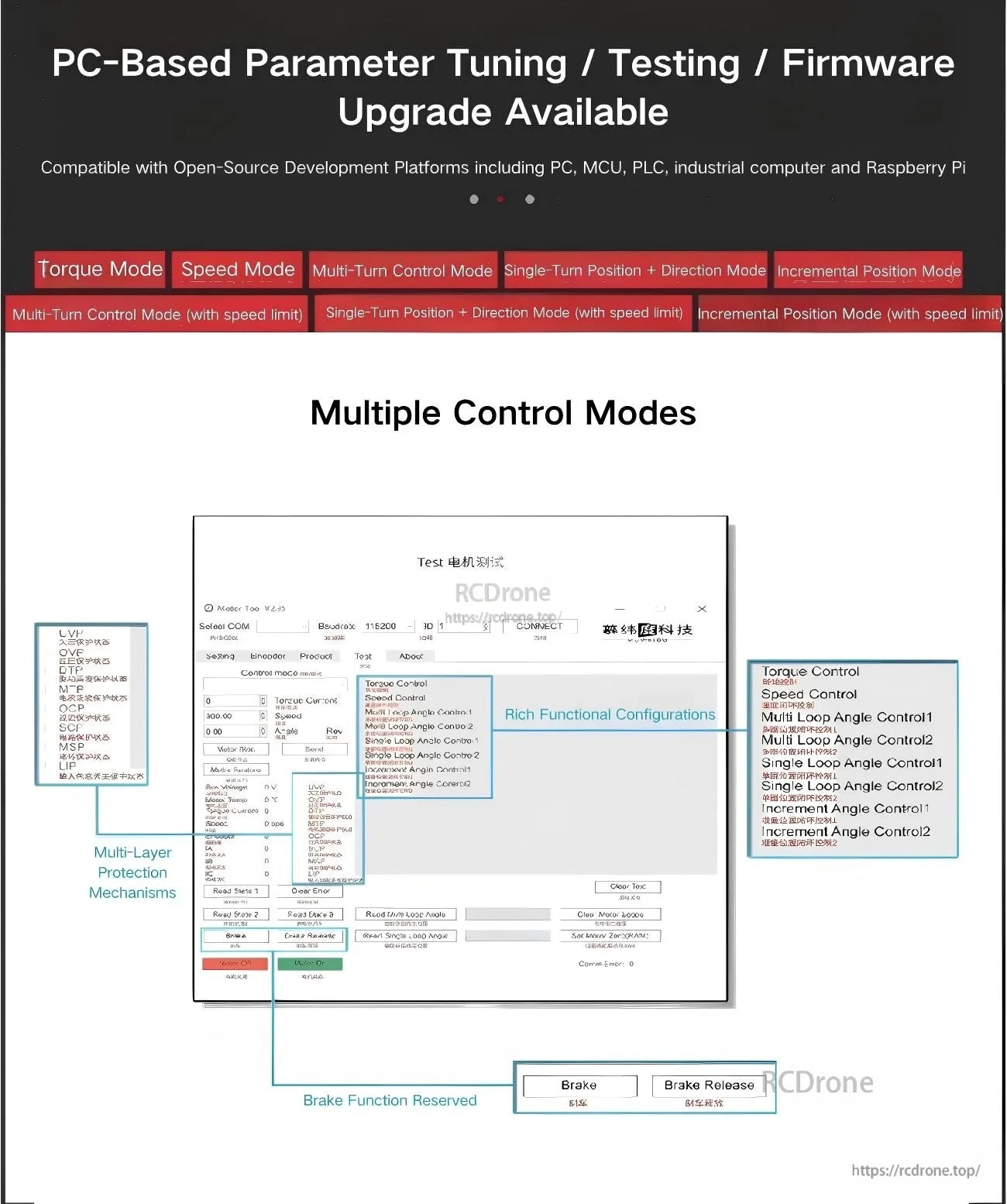
- Ajuste de parámetros / pruebas / actualización de firmware basado en PC disponible
- Compatible con plataformas de desarrollo de código abierto, incluyendo PC, MCU, PLC, computadora industrial y Raspberry Pi
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos
- Vehículos AGV
- Robots ARU
- Robots de inspección
- Sistemas de cámaras portátiles
- Sistemas LiDAR
- Soportes de cardán
Especificaciones
| Modelo | K4020 (25/40T) |
| Tensión nominal | 12V |
| Corriente nominal | 1.44A / 0.81A |
| Potencia de pico | 14W / 4.6W |
| Par nominal | 0.07 N.m / 0.06 N.m |
| Par de pico | 0.25 N.m / 0.12 N.m |
| Velocidad nominal | 1600 rpm / 700 rpm |
| Encoder | 18bit |
| Inercia del rotor | 56 gcm² |
| Monitoreo de temperatura del motor | SÍ |
| Modos de control | Velocidad/Posición |
| Protocolo de comunicación | RS485 o CAN |
| Dimensiones generales | Φ39.6 mm × 23 mm |
| Peso | 65 g |
Definición de interfaz
- Interruptor de ID
- Conector CAN/RS485
| B/L | RS485-B o CAN-L |
| A/H | RS485-A o CAN-H |
| V- | Fuente de alimentación negativa |
| V- | Fuente de alimentación negativa |
| V+ | Fuente de alimentación positiva |
| V+ | Fuente de alimentación positiva |
| T | Transmisor UART |
| R | Receptor UART |
| G | GND de señal |
Manuales / Documentos
Para preguntas de integración (cableado RS485/CAN, configuración del interruptor ID o configuración de software), contacte con soporte en [email protected] or visite https://rcdrone.top/.
Detalles

Un motor servo FOC de la serie K compacto diseñado para el control de velocidad/posición en robótica y construcciones de automatización.
La construcción integrada de motor + controlador ayuda a simplificar el cableado mientras mantiene el actuador ligero.

El etiquetado claro de pines para líneas CAN/RS485, de alimentación y UART facilita la configuración en banco y la dirección de múltiples nodos.

Related Collections

