

Motor MUWEIDU K5030 (10/35T) 16V Encoder de 18 bits RS485/CAN Servo Motor de Conducción Integrada para Robots
Motor MUWEIDU K5030 (10/35T) 16V Encoder de 18 bits RS485/CAN Servo Motor de Conducción Integrada para Robots
MUWEIDU
No se pudo cargar la disponibilidad de retiro
Resumen
MUWEIDU El motor K5030 es un motor de corriente continua sin escobillas de velocidad media a alta de la serie K (motor servo) con un diseño de accionamiento eléctrico integrado (controlador y codificador magnético incorporados). Soporta control de velocidad/posición y está diseñado para sistemas de movimiento compactos e integrados en robótica y automatización.
Características Clave
- Motor servo FOC de alto rendimiento
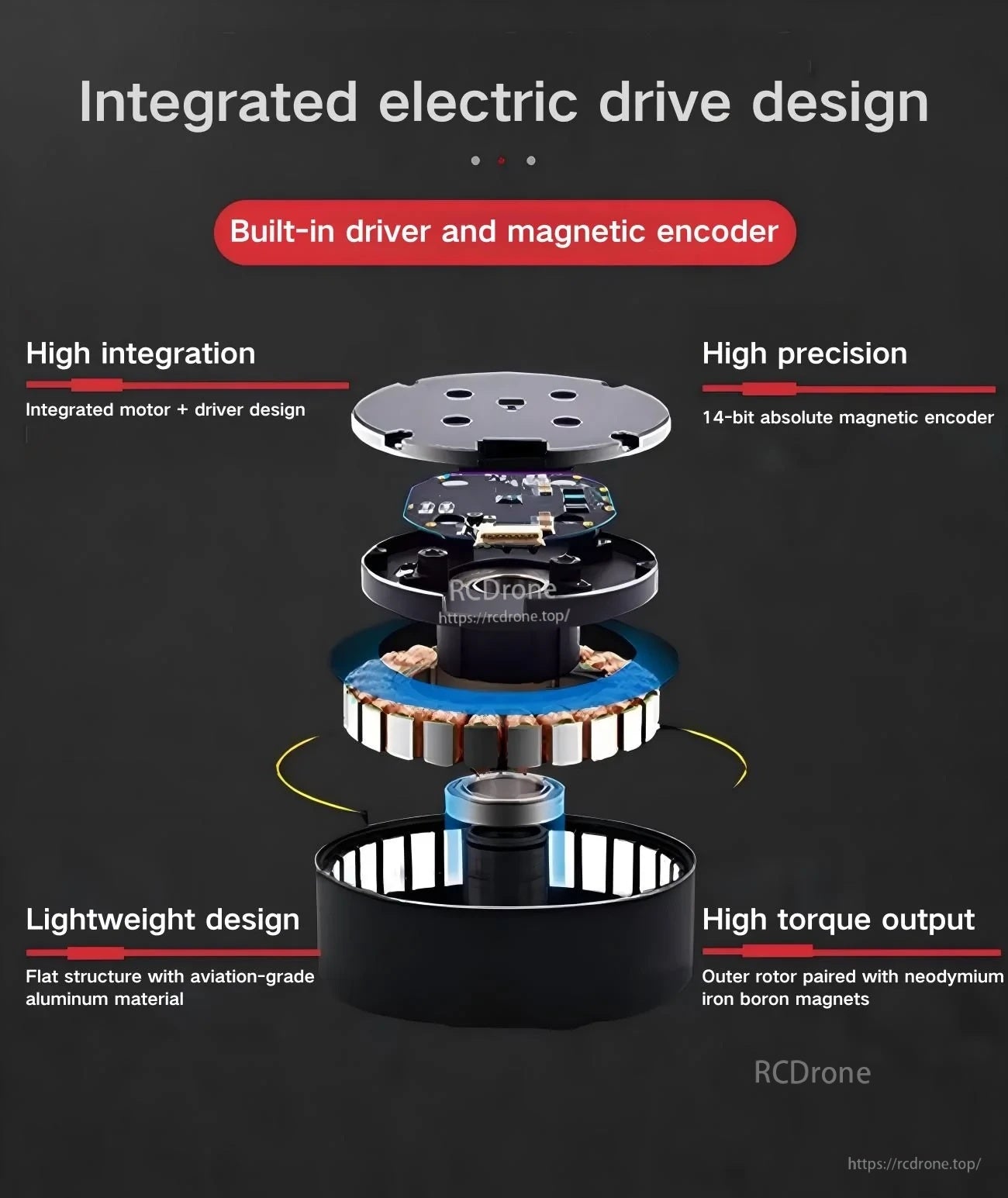
- Diseño de accionamiento eléctrico integrado: motor + controlador integrado
- Controlador y encoder magnético incorporados
- Precisión del encoder mejorada de 14 bits a 18 bits
- Par de arrastre del motor optimizado
- Entrada PWM soportada
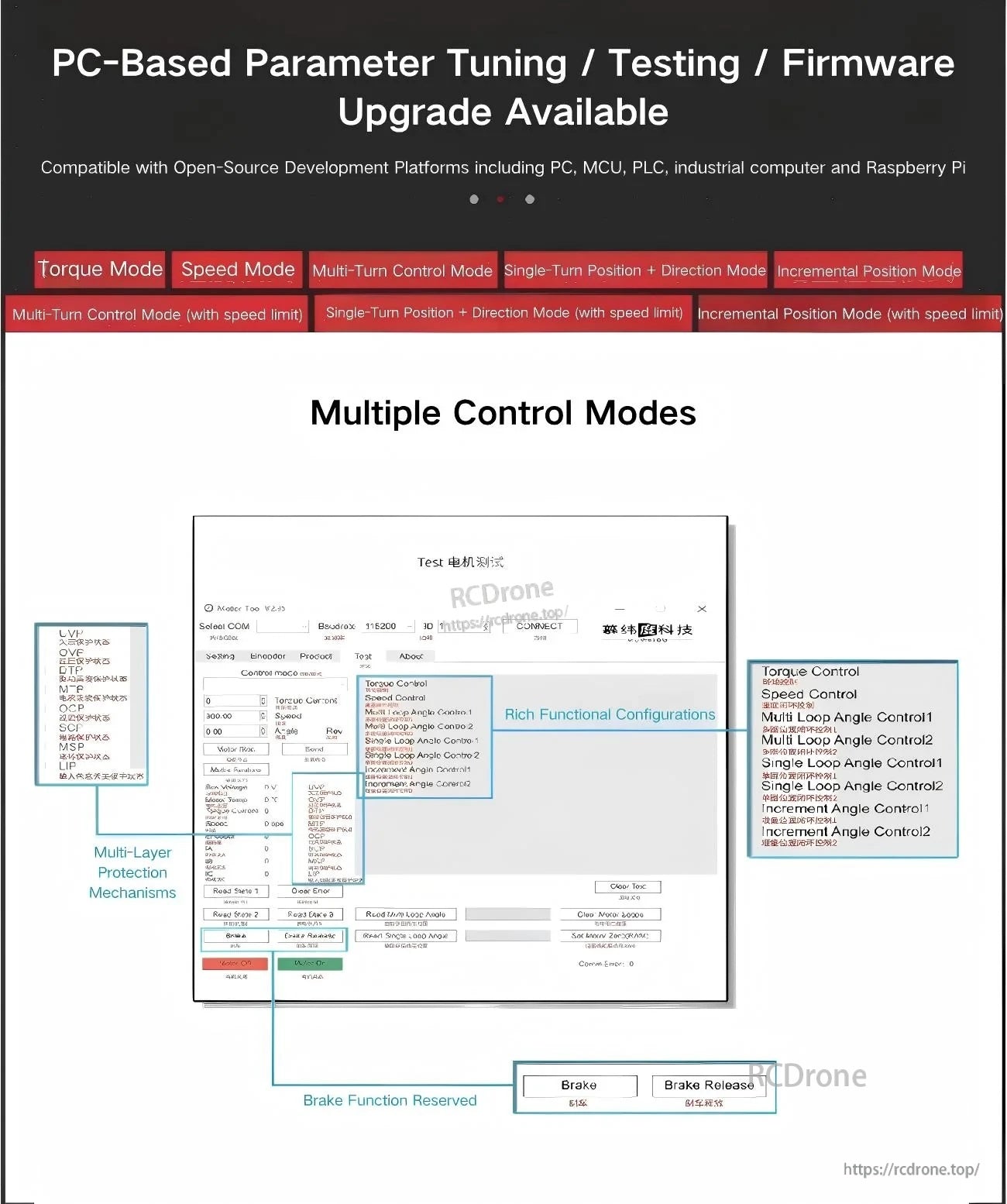
- Ajuste de parámetros / pruebas / actualización de firmware basado en PC disponible
- Compatible con plataformas de desarrollo de código abierto, incluyendo PC, MCU, PLC, computadora industrial y Raspberry Pi
- Múltiples modos de control mostrados: Modo de Par, Modo de Velocidad, Modo de Control de Múltiples Giros, Modo de Posición + Dirección de Un Solo Giro, Modo de Posición Incremental (modos mostrados con límite de velocidad)
- Mecanismos de protección de múltiples capas (como se indica)
- Función de freno reservada / Liberación de freno (como se indica)
Especificaciones
| Modelo | K5030 (10/35T) |
| Voltaje nominal | 16V |
| Corriente nominal | 4.9A / 1.22A |
| Potencia de pico | 104W / 8.8W |
| Par nominal | 0.38 N.m / 0.32 N.m |
| Par de pico | 0.7 N.m / 0.82 N.m |
| Velocidad nominal | 1550 rpm / 250 rpm |
| Encoder | 18 bits |
| Inercia del rotor | 202 gcm² |
| Monitoreo de temperatura del motor | SÍ |
| Modos de control | Velocidad/Posición |
| Protocolo de comunicación | RS485 o CAN |
| Dimensiones generales | Φ49mm×33.9mm |
| Peso | 175 g |
Definición de Interfaz
- SWITCH ID
- CAN/RS485
| B/L | RS485-B o CAN-L |
| A/H | RS485-A o CAN-H |
| V- | Fuente de Alimentación Negativa |
| V- | Fuente de Alimentación Negativa |
| V+ | Fuente de Alimentación Positiva |
| V+ | Fuente de Alimentación Positiva |
| T | Transmisor UART |
| R | Receptor UART |
| G | GND de Señal |
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos
- Vehículos AGV
- ARU robots
- Robot de inspección
- Cámara de mano
- LiDAR
- Soporte de cardán
Para soporte de integración y preguntas de pre-venta (selección de interfaz, cableado RS485/CAN y documentación), contacta [email protected] or visita https://rcdrone.top/ .
Manuales
Detalles

K5030 integra un motor servo sin escobillas de CC, controlador y codificador mejorado en un paquete compacto para juntas robóticas y ejes de automatización.
El diseño de accionamiento eléctrico integrado combina motor, electrónica del controlador y un codificador magnético para reducir el cableado y simplificar la instalación.

El etiquetado claro de los pines soporta conexiones CAN o RS485 sencillas, además de terminales UART TX/RX y de alimentación para la integración del sistema.
El soporte de software para PC permite la configuración de parámetros, pruebas y actualizaciones de firmware, con múltiples modos de control para diferentes tareas de movimiento.

Related Collections

