

Motor MUWEIDU K7050 24V DC sin escobillas FOC Servo, codificador 18bit, RS485/CAN, Φ69×46mm
Motor MUWEIDU K7050 24V DC sin escobillas FOC Servo, codificador 18bit, RS485/CAN, Φ69×46mm
MUWEIDU
No se pudo cargar la disponibilidad de retiro
Descripción
El MUWEIDU Motor K7050 es un motor de corriente continua sin escobillas de velocidad media a alta de la serie K, diseñado como un motor servo de alto rendimiento con un diseño de accionamiento eléctrico integrado. Cuenta con un controlador incorporado y un codificador magnético, soporta control de velocidad/posición y proporciona comunicación RS485 o CAN para proyectos de robótica y automatización.
Características Clave
- Motor servo FOC de alto rendimiento
- Diseño de accionamiento eléctrico integrado: controlador y codificador magnético incorporados
- Diseño integrado, ligero, de alta precisión y alto par
- Precisión del codificador mejorada de 14 bits a 18 bits
- Par de arrastre del motor optimizado
- Entrada PWM soportada
- Ajuste de parámetros / pruebas / actualización de firmware basado en PC disponible
- Compatible con plataformas de desarrollo de código abierto, incluyendo PC, MCU, PLC, computadora industrial y Raspberry Pi
- Múltiples modos de control mostrados: Modo de Par, Modo de Velocidad, Modo de Control de Múltiples Giros, Modo de Posición + Dirección de Un Solo Giro, Modo de Posición Incremental
- Mecanismos de protección de múltiples capas (mostrados)
- Función de freno reservada (mostrada); Freno / Liberación de Freno
Especificaciones
| Modelo | K7050 (10/28/45T) | Voltaje nominal | 24V |
| Corriente nominal | 8.9A / 3.36A / 2A |
| Potencia de pico | 278W / 44W / 17.5W |
| Par nominal | 1.6 N.m / 1.6 N.m / 1.5 N.m |
| Par de pico | 2.1 N.m / 2.9 N.m / 2.7 N.m |
| Velocidad Calificada | 970 rpm / 250 rpm / 100 rpm |
| Encoder | 18bit |
| Inercia del Rotor | 1040 gcm² |
| Monitoreo de Temperatura del Motor | SÍ |
| Modos de Control | Velocidad/Posición |
| Protocolo de Comunicación | RS485 o CAN |
| Dimensiones Generales | Φ69mm×46mm |
| Peso | 526g |
Definición de Interfaz
- SWITCH ID
- CAN/RS485
| B/L | RS485-B o CAN-L |
| A/H | RS485-A o CAN-H |
| V- | Fuente de Alimentación Negativa |
| V- | Fuente de Alimentación Negativa |
| V+ | Fuente de alimentación positiva |
| V+ | Fuente de alimentación positiva |
| T | Transmisor UART |
| R | Receptor UART |
| G | GND de señal |
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos
- Vehículos AGV
- Robots ARU
- Robot de inspección
- Cámara de mano
- LiDAR
- Soporte de cardán
Manuales
Para preguntas sobre cableado, integración o documentación, contacte con soporte en [email protected] or visite https://rcdrone.top/.
Detalles

Construido como un servo FOC compacto, el K7050 integra el controlador y el encoder para un control de movimiento limpio y de alta precisión.
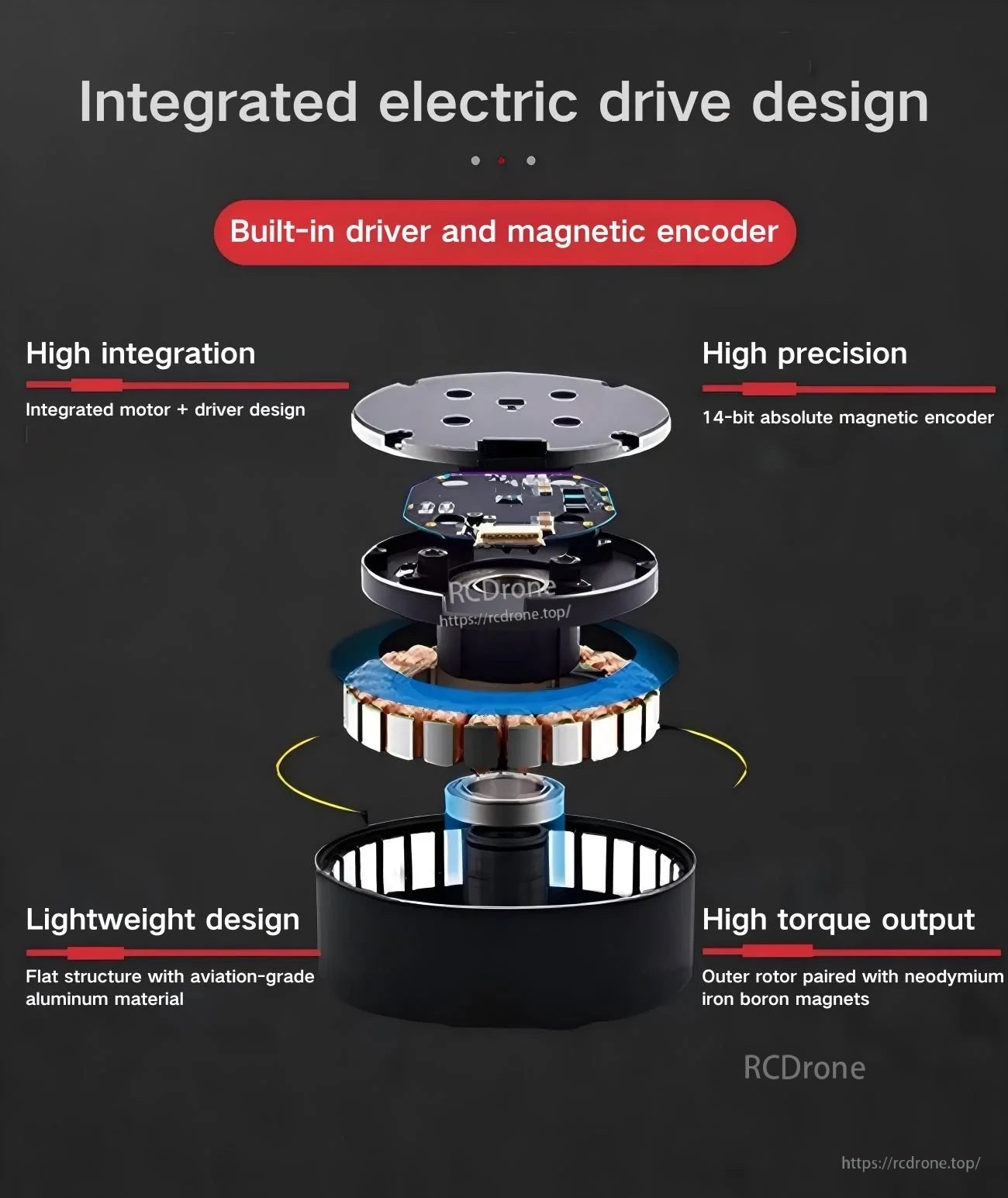
Una placa de controlador integrada y un encoder magnético reducen el cableado mientras mantienen el motor ligero y enfocado en el par.

El etiquetado claro de la interfaz facilita el cableado de la alimentación, la comunicación CAN/RS485 y las conexiones UART durante la integración.
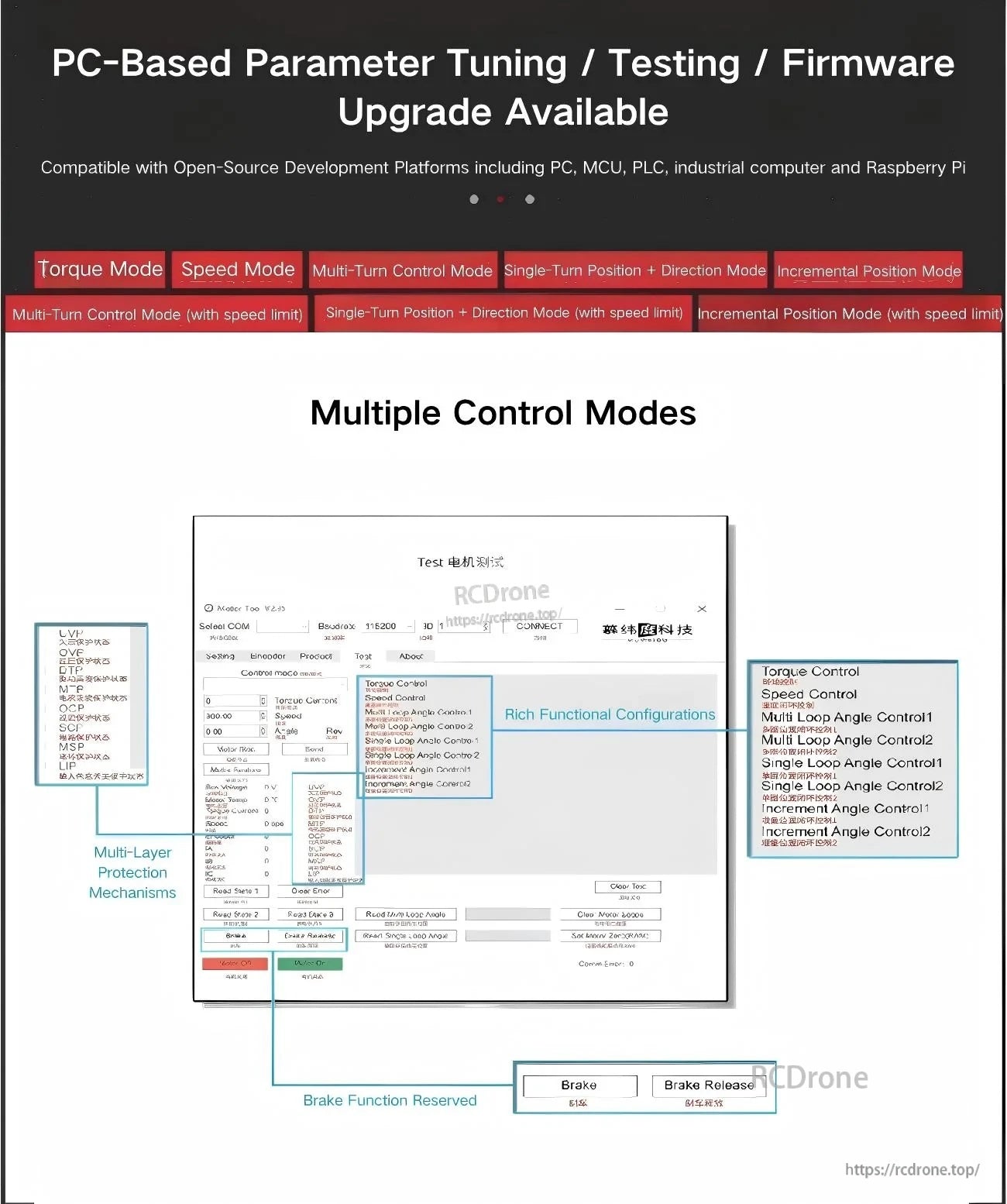
La sintonización basada en PC admite la configuración, las pruebas y las actualizaciones de firmware en los modos de control de par, velocidad y posición.
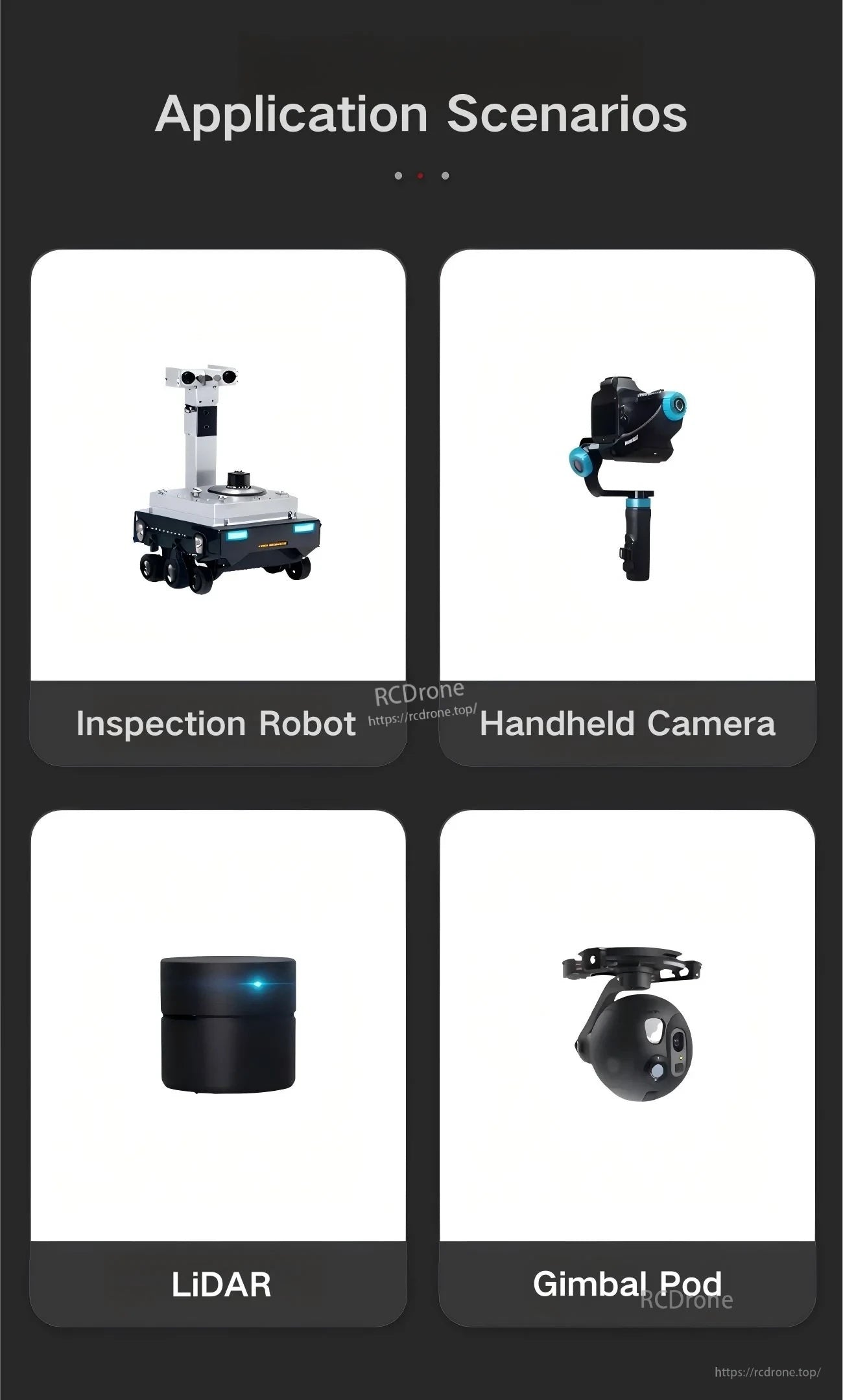
Los casos de uso comunes incluyen robots de inspección móviles, sistemas de cámaras estabilizadas, plataformas LiDAR y pods de cardán.
Related Collections

