

Motor MUWEIDU K9040 Serie K sin escobillas DC FOC Servo 24V Encoder 18bit RS485/CAN Φ89×42mm
Motor MUWEIDU K9040 Serie K sin escobillas DC FOC Servo 24V Encoder 18bit RS485/CAN Φ89×42mm
MUWEIDU
No se pudo cargar la disponibilidad de retiro
Descripción
MUWEIDU K9040 Motor es un motor de corriente continua sin escobillas de la serie K, diseñado como un motor servo FOC de alto rendimiento. Presenta un diseño de accionamiento eléctrico integrado con un controlador incorporado y un encoder magnético, y admite control de velocidad/posición para aplicaciones de robótica y automatización.
Características Clave
- Motor DC sin escobillas de velocidad media a alta de la serie K (motores servo)
- Motor servo FOC de alto rendimiento
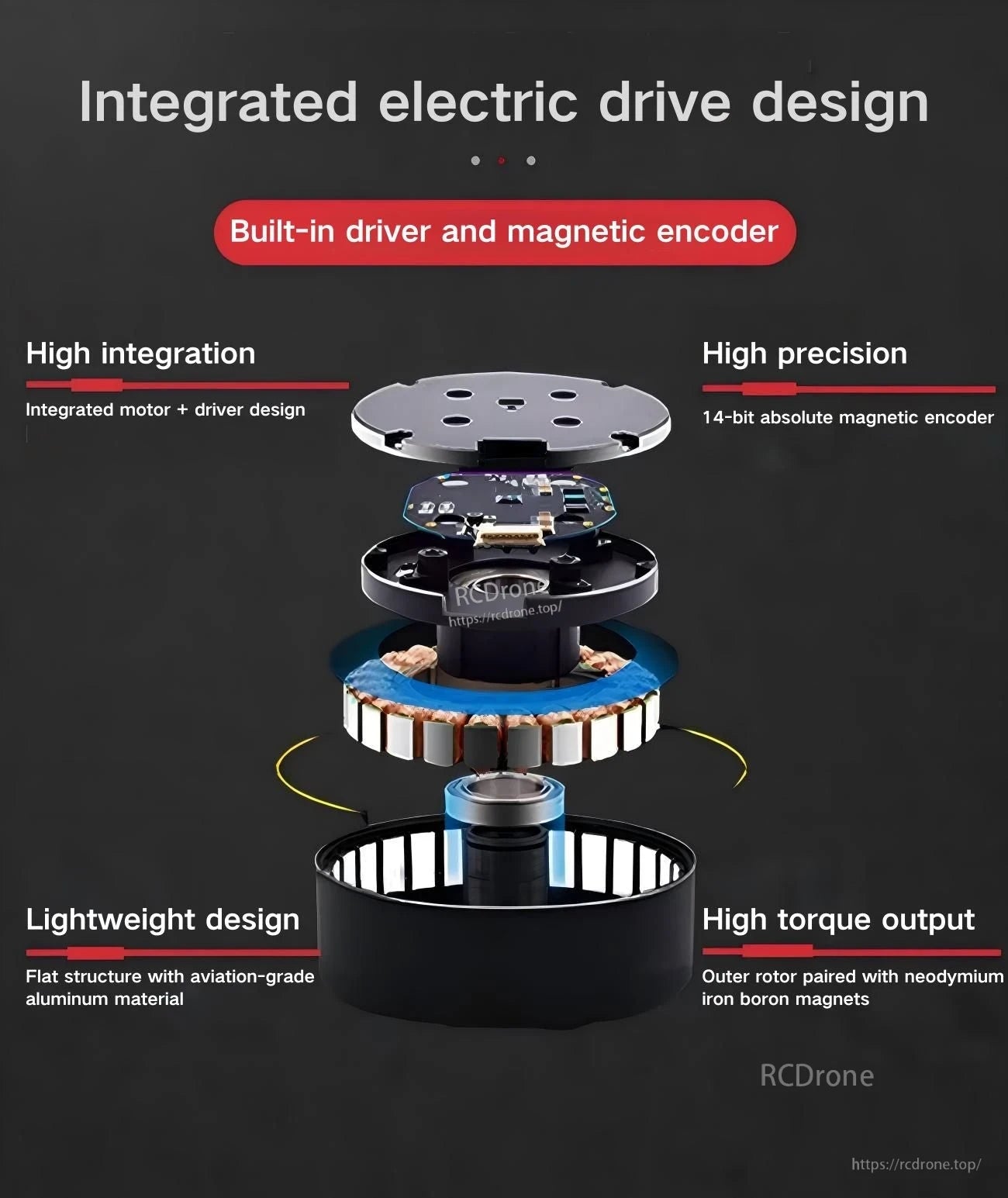
- Diseño de accionamiento eléctrico integrado: controlador y codificador magnético incorporados
- Diseño integrado de motor + controlador (alta integración)
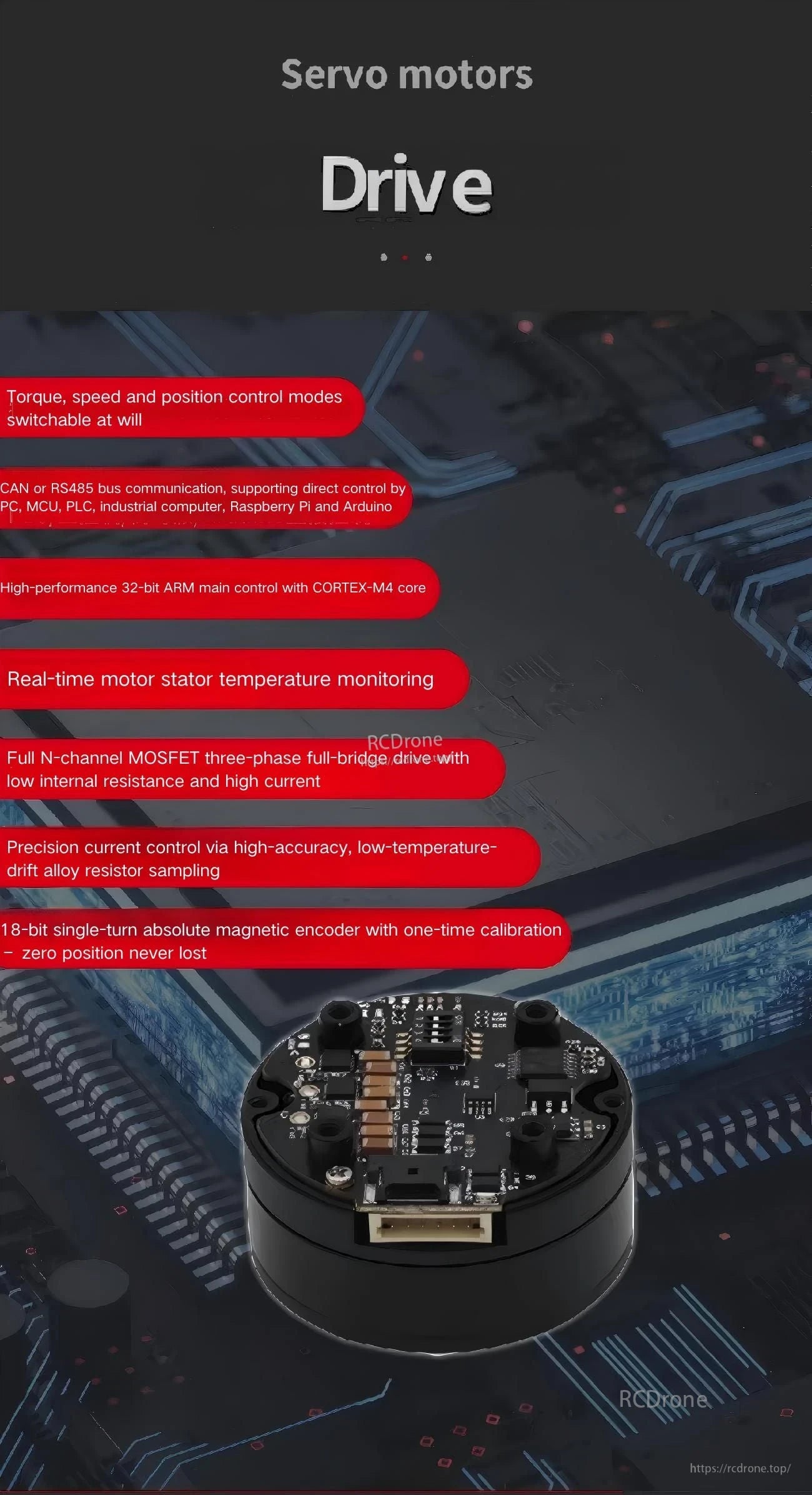
- Precisión del codificador mejorada de 14 bits a 18 bits; codificador magnético absoluto de 18 bits de una sola vuelta con calibración única (posición cero nunca perdida)
- Par de arrastre del motor optimizado
- Entrada PWM soportada
- Monitoreo de temperatura del estator del motor en tiempo real (monitoreo de temperatura del motor: SÍ)
- Comunicación por bus CAN o RS485; soporta control directo por PC, MCU, PLC, computadora industrial, Raspberry Pi y Arduino
- Control principal de alto rendimiento de 32 bits ARM con núcleo CORTEX-M4
- Conducción de puente completo trifásico N-channel MOSFET con baja resistencia interna y alta corriente
- Control de corriente de precisión a través de muestreo de resistores de aleación de alta precisión y bajo desplazamiento térmico
- Diseño ligero; estructura plana con material de aluminio de grado aeronáutico
- Salida de alto par: rotor exterior emparejado con imanes de neodimio, hierro y boro
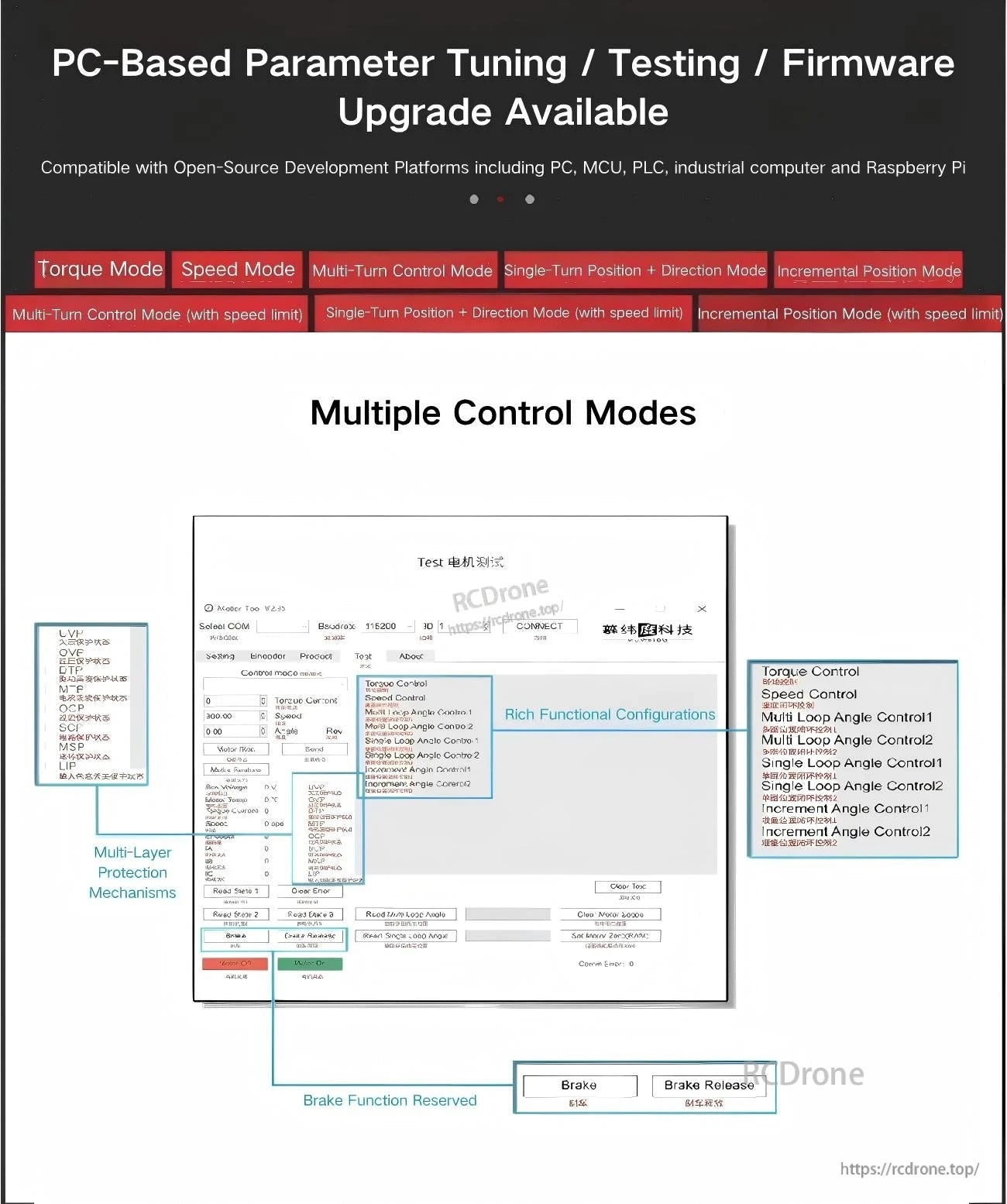
- Ajuste de parámetros / pruebas / actualización de firmware basado en PC disponible
- Múltiples modos de control mostrados: Modo de Par, Modo de Velocidad, Modo de Control de Múltiples Giros, Modo de Posición + Dirección de Un Solo Giro, Modo de Posición Incremental (incluyendo variantes con límite de velocidad)
- Función de freno reservada (como se muestra en la interfaz de la herramienta de PC)
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos
- Vehículos AGV
- Robots ARU
- Robot de inspección
- Cámara de mano
- LiDAR
- Soporte de cardán
Especificaciones
| Modelo | K9040 (16/35T) |
| Tensión nominal | 24V |
| Corriente nominal | 7.03A / 3.34A |
| Potencia de pico | 120W / 55W |
| Par nominal | 1.63 N.m / 1.67 N.m |
| Par de pico | 3.4 N.m / 5 N.m |
| Velocidad Calificada | 780 rpm / 290 rpm |
| Encoder | 18bit |
| Inercia del Rotor | 3271 gcm² |
| Monitoreo de Temperatura del Motor | SÍ |
| Modos de Control | Velocidad/Posición |
| Protocolo de Comunicación | RS485 o CAN |
| Dimensiones Generales | Φ89mm × 42mm |
| Peso | 660g |
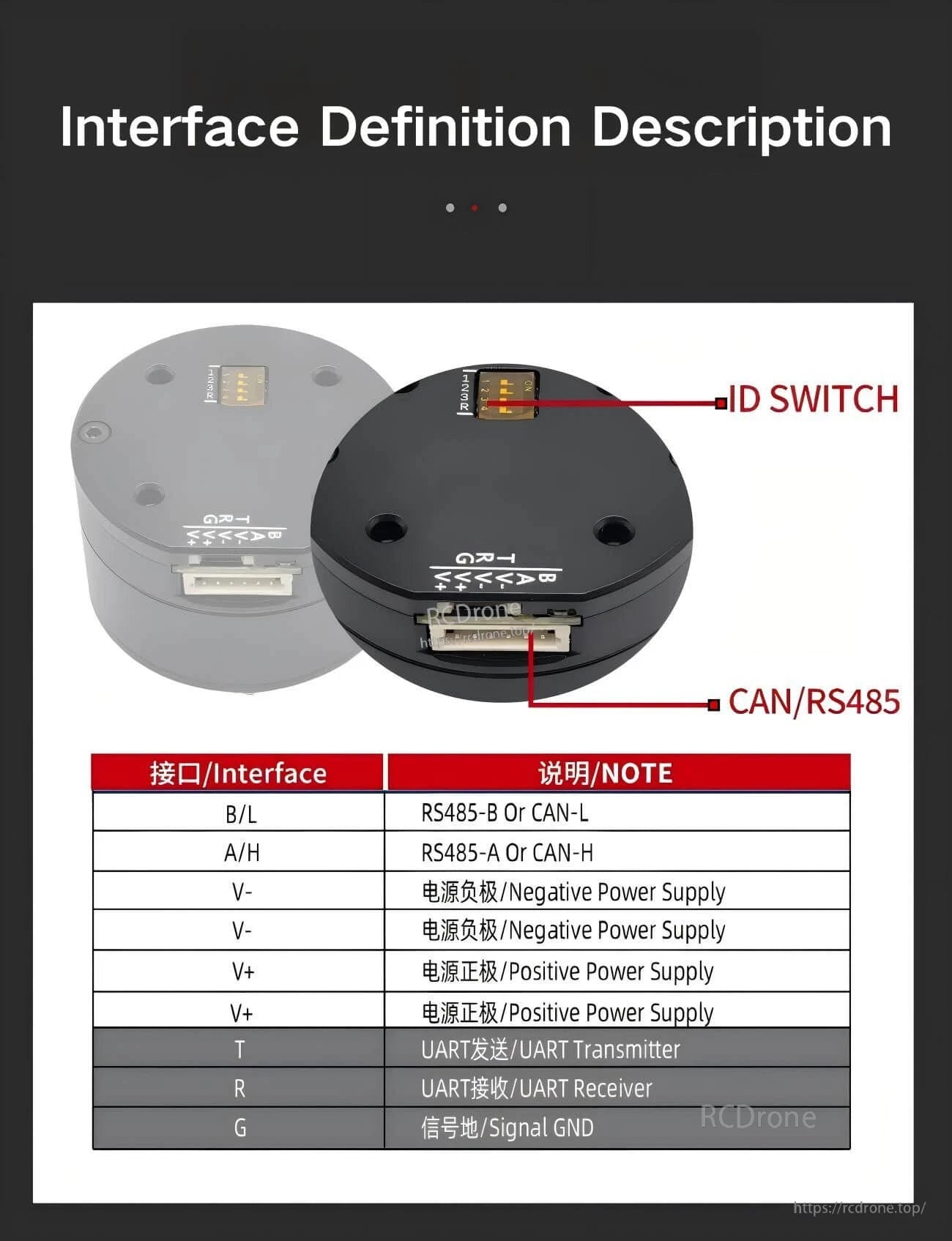
Definición de Interfaz
- SWITCH ID
- Notas del pin del conector CAN/RS485:
| B/L | RS485-B o CAN-L |
| A/H | RS485-A o CAN-H |
| V- | Fuente de alimentación negativa |
| V- | Fuente de alimentación negativa |
| V+ | Fuente de alimentación positiva |
| V+ | Fuente de alimentación positiva |
| T | Transmisor UART |
| R | Receptor UART |
| G | GND de señal |
Para selección de productos o soporte de integración, contacta [email protected] or visita https://rcdrone.top/.
Manuales
Detalles

Un motor servo de la serie K compacto FOC diseñado para robótica y automatización, con un controlador integrado y un encoder de alta precisión.
La construcción integrada de motor + controlador ayuda a simplificar el cableado y la disposición del sistema, manteniendo el paquete ligero.
Cambia entre modos de control de torque, velocidad y posición, con comunicación CAN/RS485 y monitoreo de temperatura del estator en tiempo real.
El etiquetado claro de la interfaz facilita la conexión de la alimentación y la comunicación CAN/RS485, con un interruptor de ID a bordo para configuraciones de múltiples nodos.
El software para PC soporta la sintonización de parámetros, pruebas y actualizaciones de firmware, con múltiples modos de control y opciones de protección integradas.

Bien adaptado para sistemas de control de movimiento compactos, como robots de inspección, estabilizadores de mano, plataformas LiDAR y pods de cardán.
Related Collections

