

Motor Servo MUWEIDU L12060 24V 25rpm 3.5N.m (Pico 5N.m) Codificador 15/18 bits RS485/CAN Φ120x49mm
Motor Servo MUWEIDU L12060 24V 25rpm 3.5N.m (Pico 5N.m) Codificador 15/18 bits RS485/CAN Φ120x49mm
MUWEIDU
No se pudo cargar la disponibilidad de retiro
Resumen
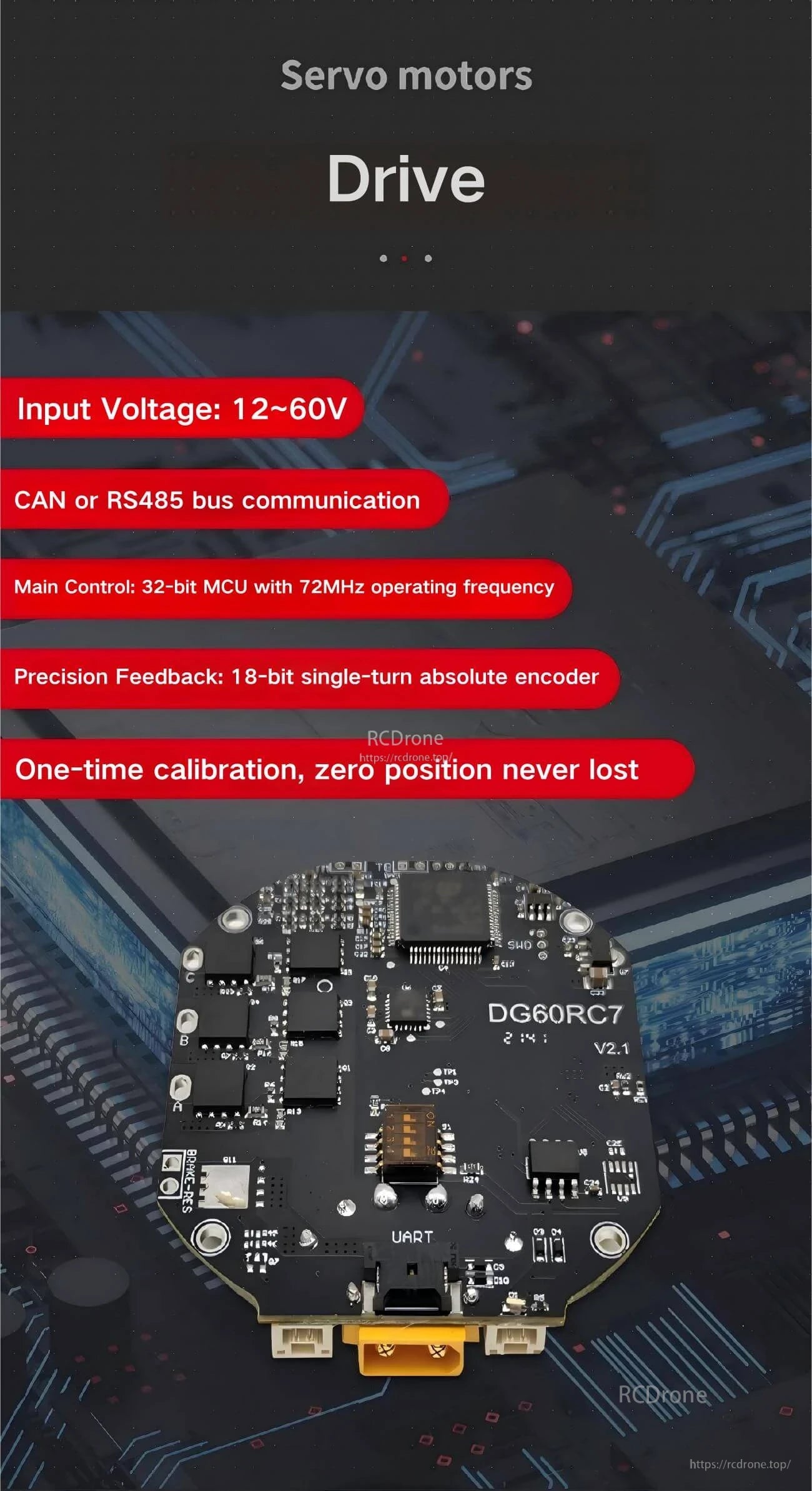
El MUWEIDU L12060 es un motor servo diseñado para el control de movimiento de alta precisión a baja velocidad. Soporta modos de control de velocidad/posición y ofrece comunicación RS485 o bus CAN. La serie L se presenta como una serie de & motores de CC sin escobillas de alta precisión y baja velocidad con un diseño de eje hueco, operación & suave y estable, y posicionamiento certificado por CE.
Características clave
- Control de posición de alta precisión a baja velocidad
- Diseño de eje hueco
- Operación estable y suave
- Sistema integrado de alta precisión; construcción ligera; alto rendimiento de par
- Características del sistema de accionamiento eléctrico integrado:
- El MCU de 32 bits de alto rendimiento permite que la serie MS sea completamente compatible con todos los comandos de control de la serie MF
- Se utilizan láminas de acero silicio de primera calidad y imanes permanentes de alto rendimiento resistentes a altas temperaturas como materiales principales del motor
- El diseño de rotor exterior aplanado en múltiples etapas proporciona un mayor par, ideal para aplicaciones con espacio limitado
- Estructura sin escobillas combinada con rodamientos de alto rendimiento asegura una rotación más suave y una vida útil más larga
- Resistencias de aleación de alta precisión y bajo desplazamiento de temperatura logran un muestreo y control de corriente precisos
- Control de puente completo de tres fases N-channel presenta baja resistencia interna y alta salida de corriente
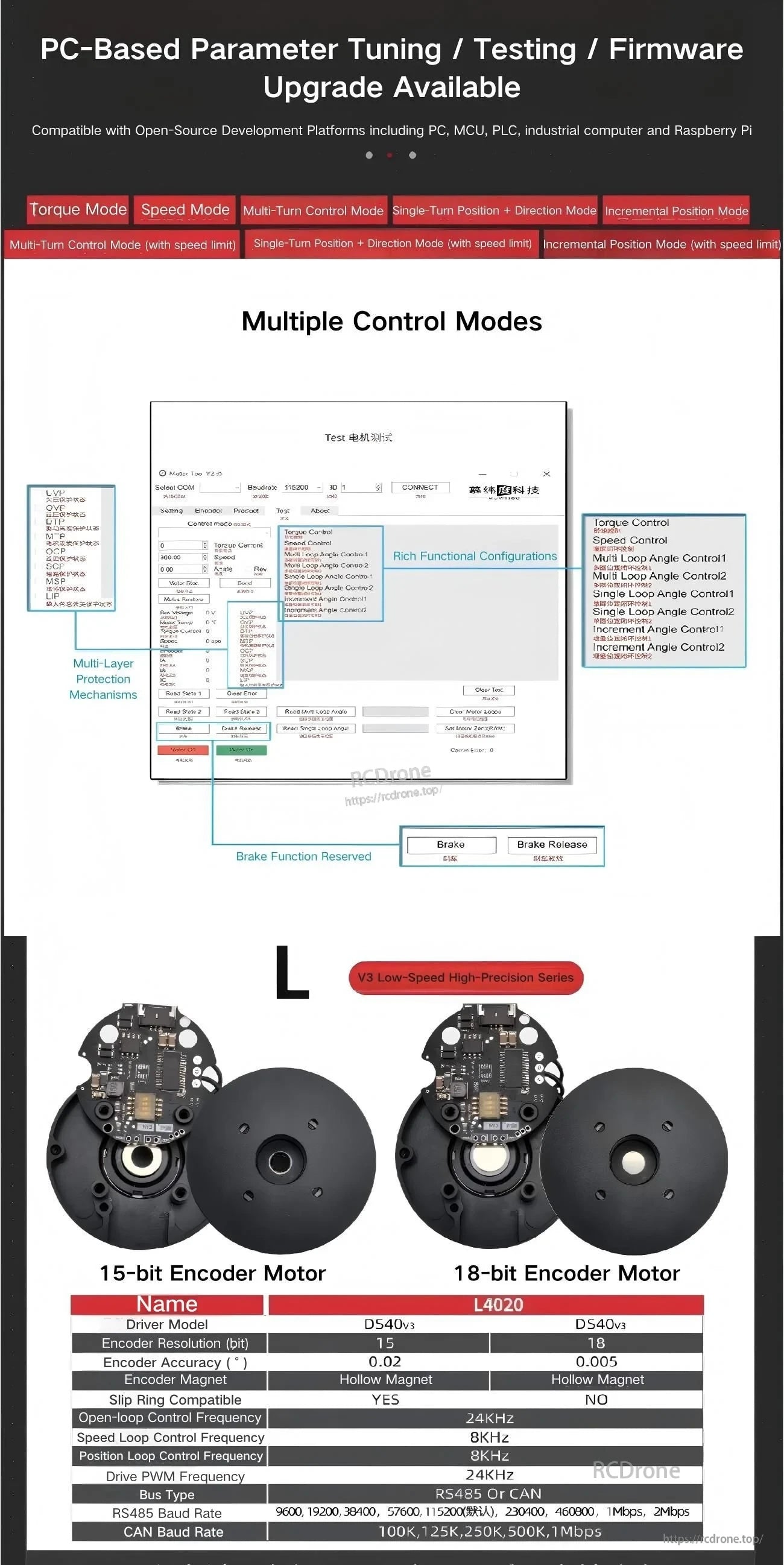
- Soporta conmutación sin interrupciones entre modos de control de par en bucle abierto, velocidad y posición
- Monitoreo de temperatura del motor: SÍ
- Calibración única; posición cero nunca perdida
- Certificado CE (como se indica)
Especificaciones
| Modelo | L12060 |
| Tensión nominal | 24V |
| Corriente nominal | 1.5A |
| Pico de Potencia | 10W |
| Par Nominal | 3.5 N.m |
| Par de pico | 5 N.m |
| Velocidad nominal | 25 rpm |
| Encoder | 15 bits o 18 bits |
| Inercia del rotor | 5500 gcm^2 |
| Monitoreo de temperatura del motor | SÍ |
| Modos de control | Velocidad/Posición |
| Protocolo de comunicación | RS485 o CAN |
| Dimensiones generales | Phi120mm x 49mm |
| Peso | 1173 g |
Notas de interfaz / cableado
- Interruptor ID (como se etiqueta)
- Interfaz CAN/RS485 (como se etiqueta)
- Definición de interfaz (como se etiqueta):
- B/L: RS485-B o CAN-L
- A/H: RS485-A o CAN-H
- V-: Fuente de alimentación negativa
- V+: Suministro de energía positivo
- T: Transmisor UART
- R: Receptor UART
- G: GND de señal
Para orientación sobre selección o soporte de integración, contacta [email protected] or visita https://rcdrone.top/.
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos
- Vehículos AGV
- Robots ARU
Manuales
Detalles

Diseñado para control de movimiento de alta precisión a baja velocidad, la serie L combina un formato de eje hueco con una operación estable y suave.

La electrónica de control integrada y una estructura de rotor externo están optimizadas para un alto par en instalaciones compactas.
La comunicación CAN/RS485 y la retroalimentación de codificador de alta resolución ayudan a simplificar el cableado mientras mantienen la repetibilidad de posicionamiento después de la calibración.

El etiquetado claro de los terminales apoya una rápida integración para conexiones de alimentación, UART y bus RS485/CAN.

Related Collections

