

Motor MUWEIDU L3526 12V Mini Servo, Codificador de 15 bits, Control de Velocidad/Posición RS485 para Robótica
Motor MUWEIDU L3526 12V Mini Servo, Codificador de 15 bits, Control de Velocidad/Posición RS485 para Robótica
MUWEIDU
No se pudo cargar la disponibilidad de retiro
Descripción
MUWEIDU L3526 Motor es un mini servo motor de una serie de motores de CC sin escobillas de baja velocidad y alta precisión, diseñado para aplicaciones de accionamiento eléctrico integrado que requieren un funcionamiento estable y suave. Soporta control de velocidad/posición y utiliza comunicación RS485.
Características Clave
- Serie de motores de CC sin escobillas de alta precisión y baja velocidad (mini servomotores)
- Operación estable & y suave
- Monitoreo de temperatura del motor: SÍ
- Cumple con los requisitos de control de posición de baja velocidad y alta precisión
- Diseño de rotor exterior aplanado en múltiples etapas que ofrece mayor par, ideal para aplicaciones con espacio limitado
- Estructura sin escobillas combinada con rodamientos de alto rendimiento que asegura una rotación más suave y una vida útil más larga
- Resistencias de aleación de alta precisión y bajo desplazamiento de temperatura que permiten un muestreo y control de corriente precisos
- Controlador de puente completo de tres fases N-channel que presenta baja resistencia interna y alta salida de corriente
- Soporta conmutación sin interrupciones entre modos de control de par en bucle abierto, velocidad y posición
Especificaciones
| Modelo | L3526 |
| Voltaje nominal | 12V |
| Corriente nominal | 0.79A |
| Potencia máxima | 6.4W |
| Par nominal | 0.05 N.m |
| Par máximo | 0.13 N.m |
| Velocidad Calificada | 1250 rpm |
| Codificador | 15 bits |
| Inercia del Rotor | 58 gcm² |
| Monitoreo de Temperatura del Motor | SÍ |
| Modos de Control | Velocidad/Posición |
| Protocolo de Comunicación | RS485 |
| Dimensiones Generales | Φ35 mm × 26 mm |
| Peso | 50 g |
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos
- Vehículos AGV
- Robots ARU
Manuales
Para orientación sobre selección, soporte de integración o preguntas sobre documentación, contacta [email protected] or visita https://rcdrone.top/.
Detalles

Los servomotores mini compactos están diseñados para movimientos de baja velocidad y alta precisión donde la operación suave y estable es importante.

Un diseño de accionamiento integrado combina una estructura de rotor exterior, rodamientos de calidad y detección de corriente precisa para un control de par de salida.
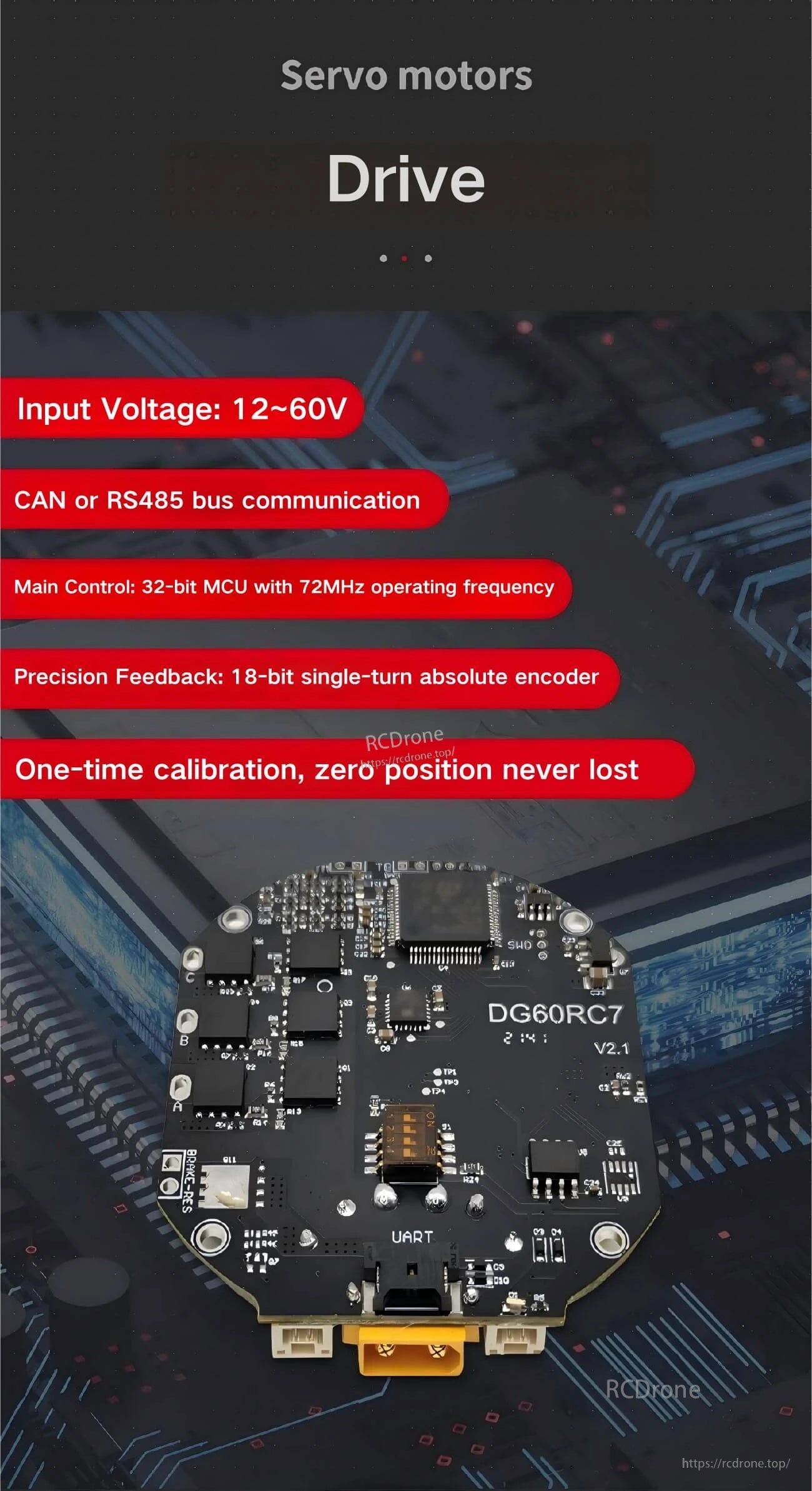
La comunicación RS485 y la electrónica de control a bordo soportan comandos de velocidad/posición con retroalimentación de encoder para control de movimiento en bucle cerrado.

El cableado se mantiene sencillo con un puerto CAN/RS485 etiquetado, un interruptor de ID para la configuración del bus y definiciones de pines claras para alimentación y señal.
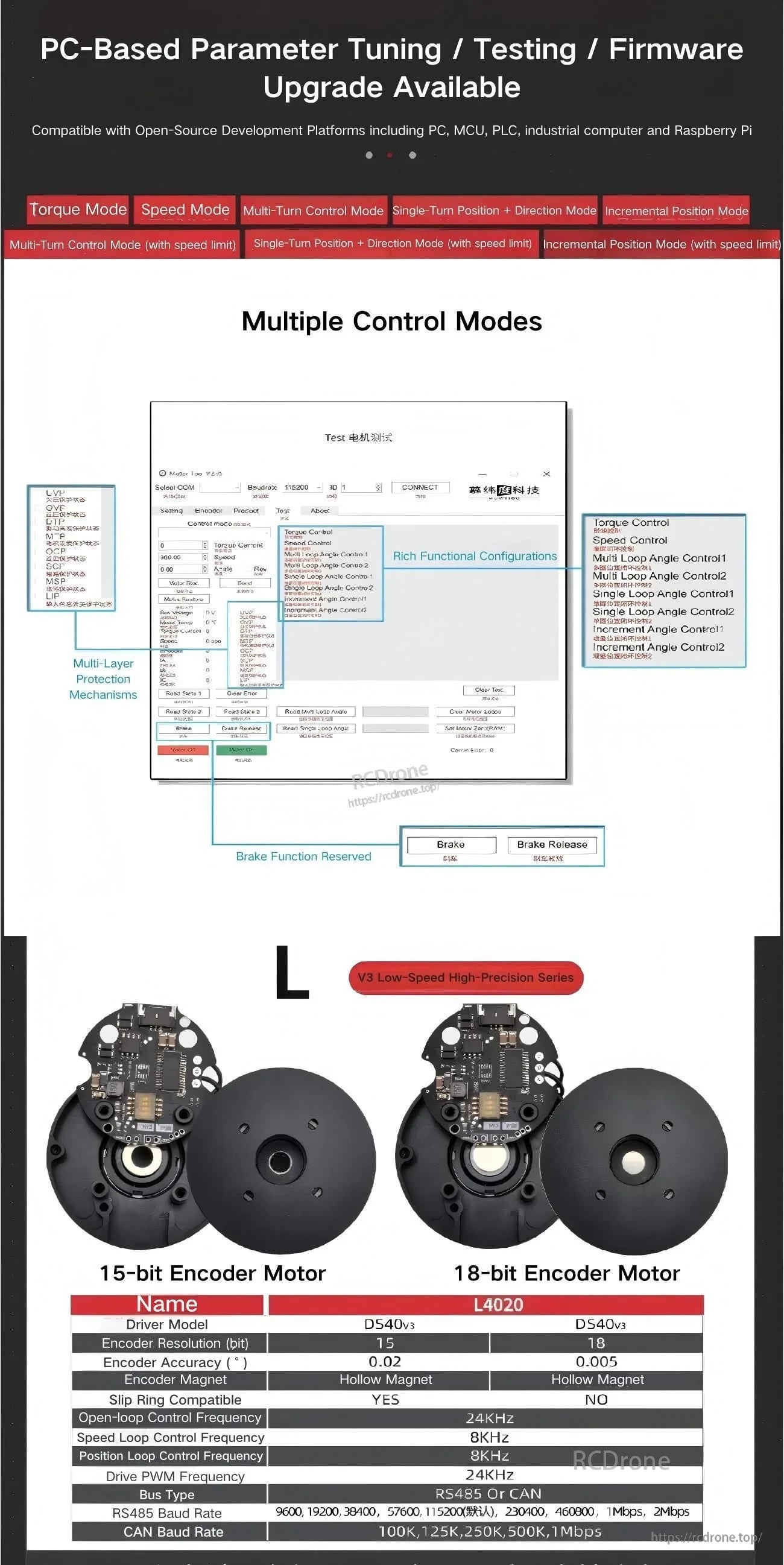
Las herramientas basadas en PC permiten la sintonización de parámetros, pruebas y actualizaciones de firmware, con múltiples modos de control disponibles para diferentes tareas de movimiento.

Related Collections

