

Motor Mini Servo MUWEIDU L5020 16V 500rpm 0.18N.m RS485/CAN Codificador 15-bit/18-bit 99g
Motor Mini Servo MUWEIDU L5020 16V 500rpm 0.18N.m RS485/CAN Codificador 15-bit/18-bit 99g
MUWEIDU
Precio habitual
$180.00 USD
Precio habitual
Precio de oferta
$180.00 USD
Precio unitario
por
Impuestos incluidos.
Los gastos de envío se calculan en la pantalla de pago.
No se pudo cargar la disponibilidad de retiro
Descripción
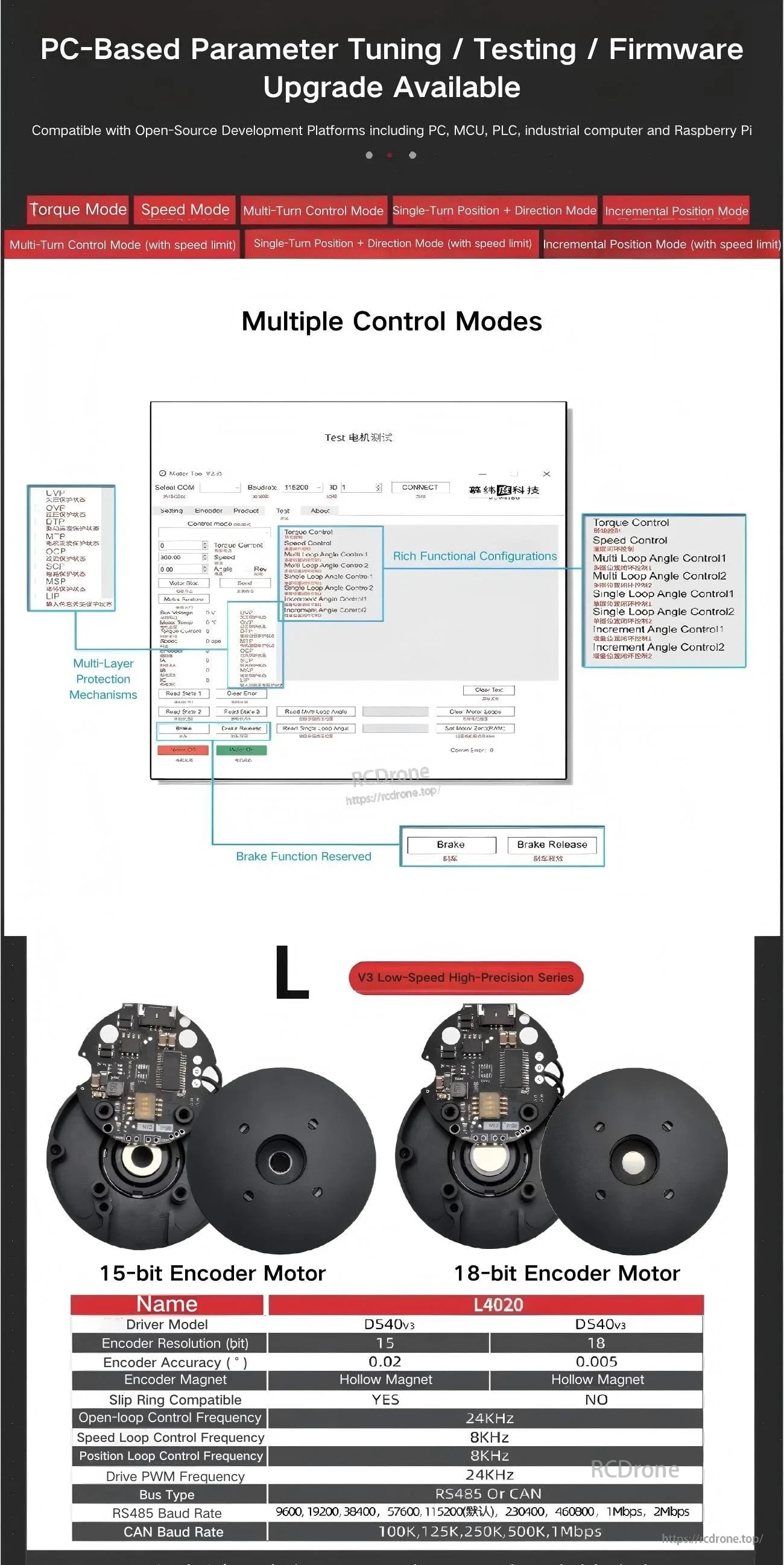
MUWEIDU El motor L5020 es un mini motor servo diseñado para el control de posición de baja velocidad y alta precisión. Soporta modos de control de velocidad/posición y proporciona comunicación RS485 o CAN, con retroalimentación de codificador opcional de 15 bits o 18 bits y monitoreo de temperatura del motor.
Características Clave
- Serie de motores de CC sin escobillas de alta precisión y baja velocidad&
- Mini Motores Servo
- Diseño de eje hueco
- Operación estable y suave
- Certificado CE
- Alta precisión integrada
- Estructura ligera; alto rendimiento de par
- Diseñado con estándares ultra-altos
- Cumple con los requisitos de control de posición de baja velocidad y alta precisión
- Se utilizan láminas de acero silicio premium y imanes permanentes de alto rendimiento resistentes a altas temperaturas como materiales principales del motor
- El diseño de rotor exterior aplanado en múltiples etapas proporciona un mayor par, ideal para aplicaciones con espacio limitado
- Estructura sin escobillas combinada con rodamientos de alto rendimiento asegura una rotación más suave y una vida útil más larga
- Resistencias de aleación de alta precisión y bajo desplazamiento de temperatura permiten un muestreo y control de corriente precisos
- Controlador de puente completo de tres fases N-channel con características de baja resistencia interna y alta salida de corriente
- Soporta conmutación sin interrupciones entre modos de control de par en bucle abierto, velocidad y posición
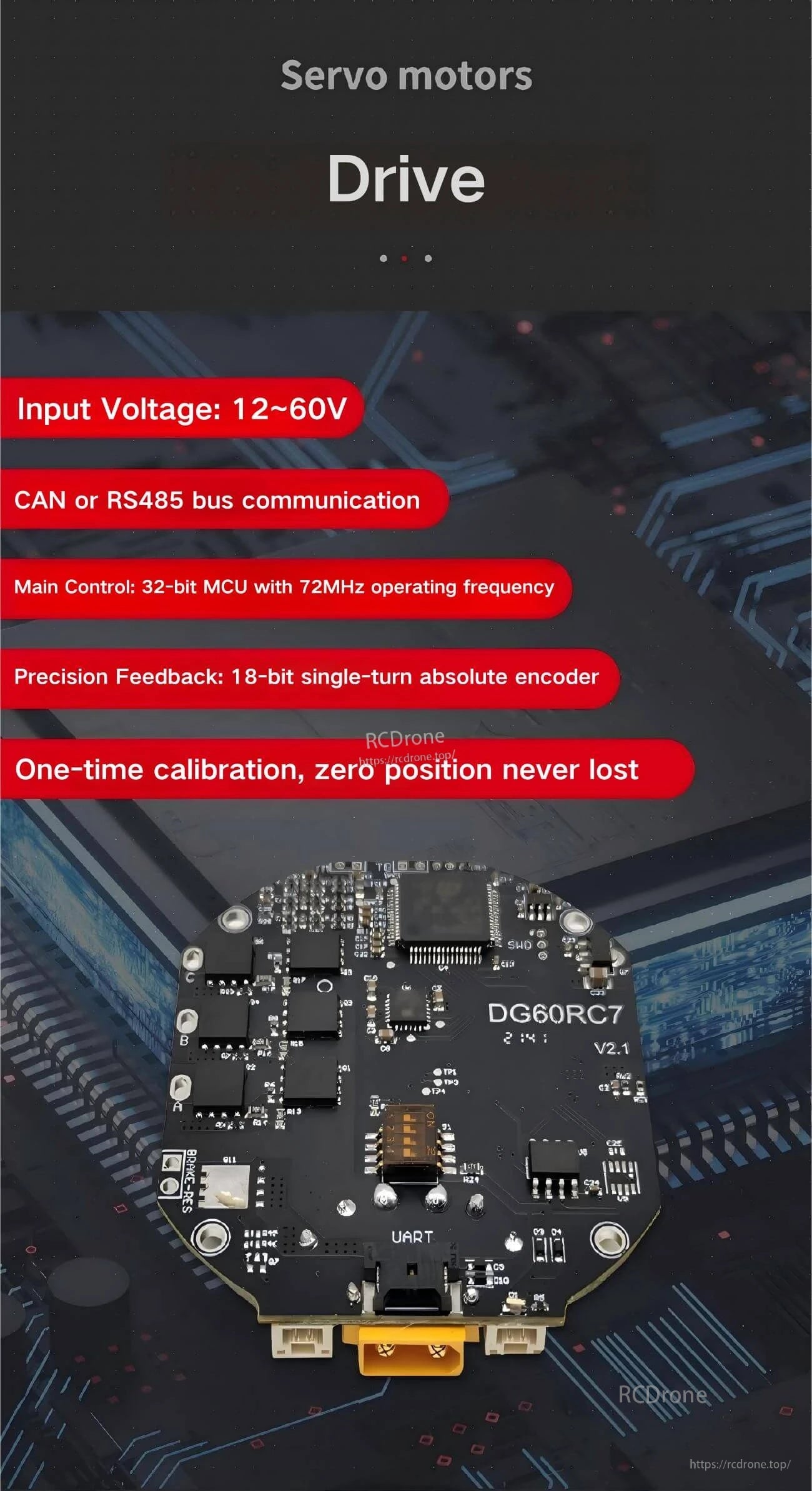
- Destacados del controlador: Voltaje de entrada 12~60V; Comunicación por bus CAN o RS485; Control principal: MCU de 32 bits con frecuencia de operación de 72MHz; Retroalimentación de precisión: codificador absoluto de una vuelta de 18 bits; Calibración única, posición cero nunca perdida
Escenarios de Aplicación
- Robots Humanoides
- Brazos Robóticos
- Exoesqueletos
- Robots Cuadrúpedos
- Vehículos AGV
- Robots ARU
Especificaciones
| Modelo | L5020 |
| Tensión Nominal | 16V |
| Corriente Nominal | 0.8A |
| Potencia Máxima | 6.7W |
| Par Nominal | 0.18N.m |
| Par Máximo | 0.28N.m |
| Velocidad Nominal | 500rpm |
| Encoder | 15bit o 18bit |
| Inercia del Rotor | 136gcm^2 |
| Monitoreo de Temperatura del Motor | SÍ |
| Modos de Control | Velocidad/Posición |
| Protocolo de Comunicación | RS485 o CAN |
| Dimensiones Generales | Φ49mm×23.9mm |
| Peso | 99g |
Interfaces
- SWITCH DE ID
- CAN/RS485
| B/L | RS485-B o CAN-L |
| A/H | RS485-A o CAN-H |
| V- | Fuente de Alimentación Negativa |
| V- | Fuente de Alimentación Negativa |
| V+ | Fuente de Alimentación Positiva |
| V+ | Fuente de Alimentación Positiva |
| T | Transmisor UART |
| R | Receptor UART |
| G | GND de Señal |
Para soporte de preventa e integración, contacte https://rcdrone.top/ o envíe un correo electrónico a [email protected].
Manuales
Detalles




Related Collections

