

MUWEIDU L5028 Motor Mini Servo Motor 16V 150rpm 0.25N.m RS485/CAN Codificador de 15 bits/18 bits
MUWEIDU L5028 Motor Mini Servo Motor 16V 150rpm 0.25N.m RS485/CAN Codificador de 15 bits/18 bits
MUWEIDU
No se pudo cargar la disponibilidad de retiro
Descripción
MUWEIDU El motor L5028 es un mini motor servo diseñado para control de movimiento de baja velocidad y alta precisión. Soporta control de velocidad/posición y ofrece opciones de comunicación RS485 o CAN, con opciones de codificador de 15 bits o 18 bits para retroalimentación.
Características Clave
- Serie de motores de CC sin escobillas de baja velocidad & alta precisión (motores servo)
- Diseño de eje hueco
- Operación estable & suave
- Certificado CE
- Alta precisión integrada
- Estructura ligera, alto rendimiento de par
- Cumple con los requisitos de control de posición de baja velocidad y alta precisión
- Se utilizan láminas de acero silicio premium y imanes permanentes de alto rendimiento resistentes a altas temperaturas como materiales centrales del motor
- El diseño de rotor exterior aplanado en múltiples etapas proporciona un mayor par, ideal para aplicaciones con espacio limitado
- Estructura sin escobillas combinada con rodamientos de alto rendimiento asegura una rotación más suave y una vida útil más larga
- Resistencias de aleación de alta precisión y bajo desplazamiento de temperatura realizan un muestreo y control de corriente precisos
- Controlador de puente completo de tres fases N-channel con baja resistencia interna y alta salida de corriente
- Soporta conmutación sin interrupciones entre modos de control de par en bucle abierto, velocidad y posición
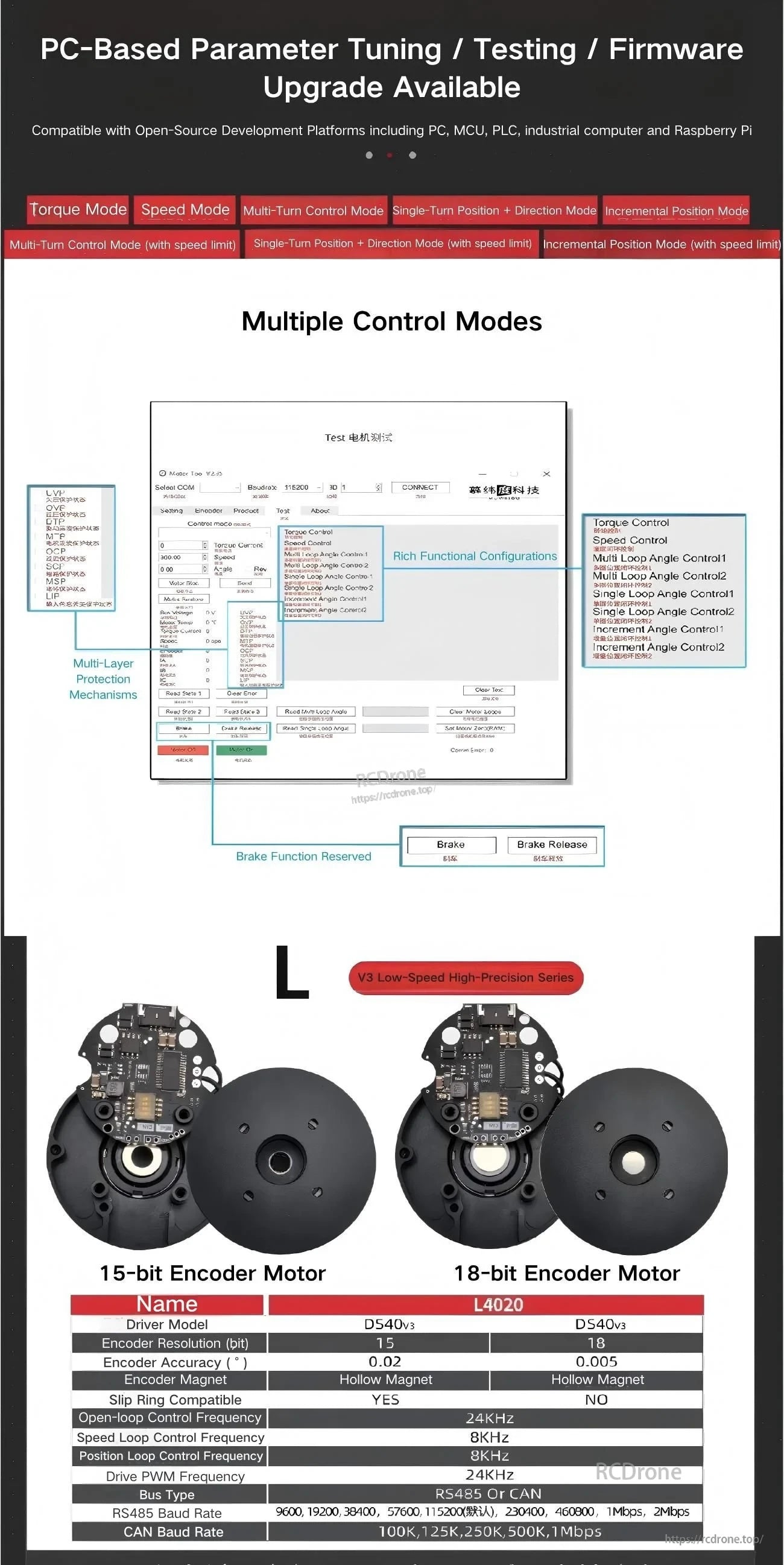
- Ajuste de parámetros / pruebas / actualización de firmware basado en PC disponible
- Compatible con plataformas de desarrollo de código abierto, incluyendo PC, MCU, PLC, computadora industrial y Raspberry Pi
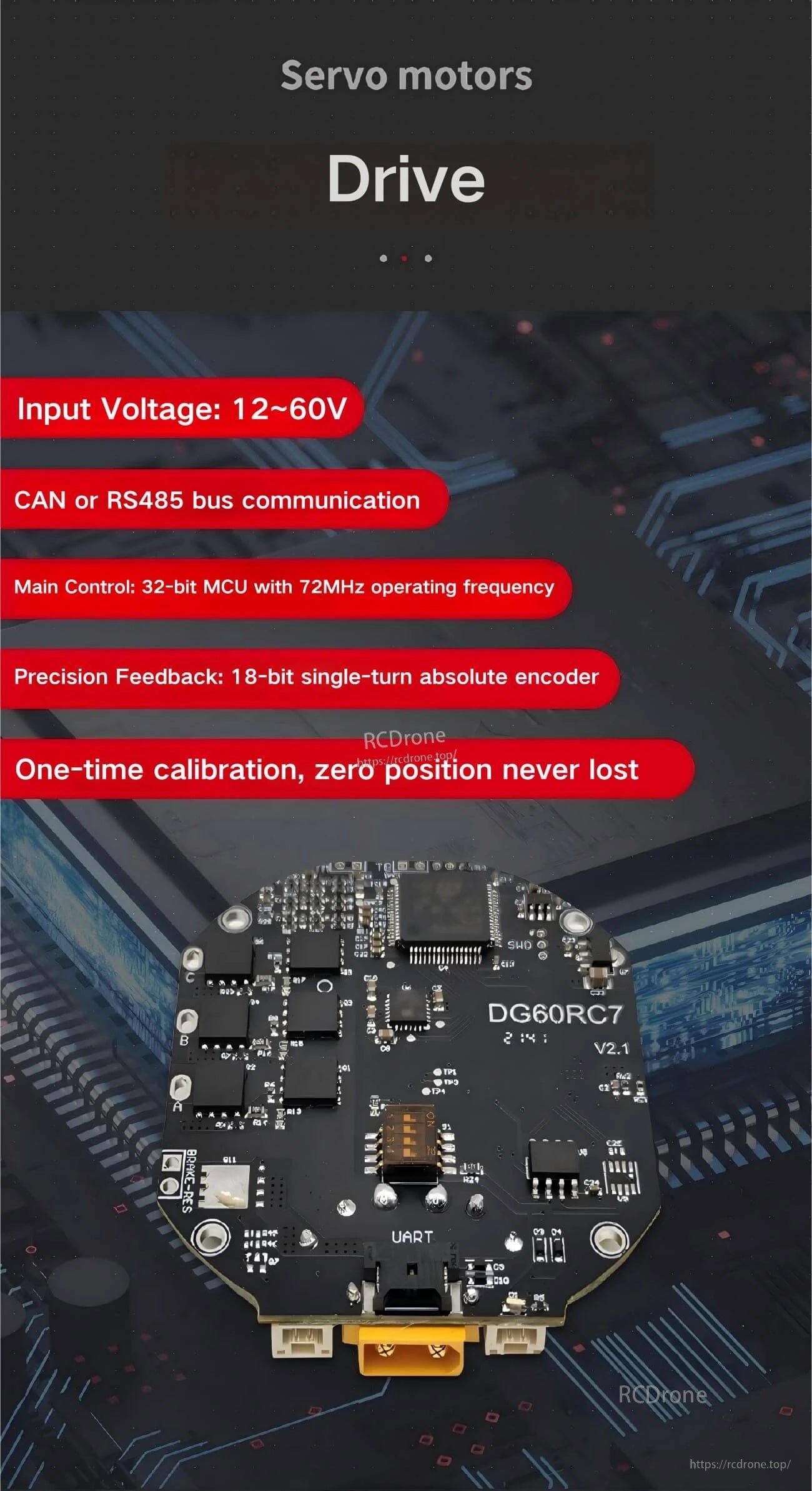
- Tensión de entrada: 12~60V
- Comunicación por bus CAN o RS485
- Control principal: MCU de 32 bits con frecuencia de operación de 72MHz
- Retroalimentación de precisión: codificador absoluto de una vuelta de 18 bits
- Calibración única, posición cero nunca perdida
- Múltiples modos de control: Modo de Par; Modo de Velocidad; Modo de Control de Múltiples Vueltas; Modo de Posición de Una Vuelta + Dirección; Modo de Posición Incremental
- Modos de control (con límite de velocidad): Modo de control de múltiples vueltas (con límite de velocidad); Modo de posición + dirección de una sola vuelta (con límite de velocidad); Modo de posición incremental (con límite de velocidad)
Especificaciones
| Modelo | L5028 |
| Tensión nominal | 16V |
| Corriente nominal | 0.82A |
| Potencia de pico | 4.7W |
| Par nominal | 0.25 N.m |
| Par de pico | 0.37 N.m |
| Velocidad nominal | 150 rpm |
| Encoder | 15-bit o 18-bit |
| Inercia del rotor | 192 gcm^2 |
| Monitoreo de temperatura del motor | Sí |
| Modos de control | Velocidad/Posición |
| Protocolo de comunicación | RS485 o CAN |
| Dimensiones generales | Phi49 mm x 28.9 mm |
| Peso | 135 g |
Definición de interfaz (CAN/RS485)
| Interfaz | Nota |
|---|---|
| B/L | RS485-B o CAN-L |
| A/H | RS485-A o CAN-H |
| V- | Fuente de alimentación negativa |
| V- | Fuente de alimentación negativa |
| V+ | Fuente de alimentación positiva |
| V+ | Fuente de alimentación positiva |
| T | Transmisor UART |
| R | Receptor UART |
| G | GND de señal |
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos
- Vehículos AGV
- Robots ARU
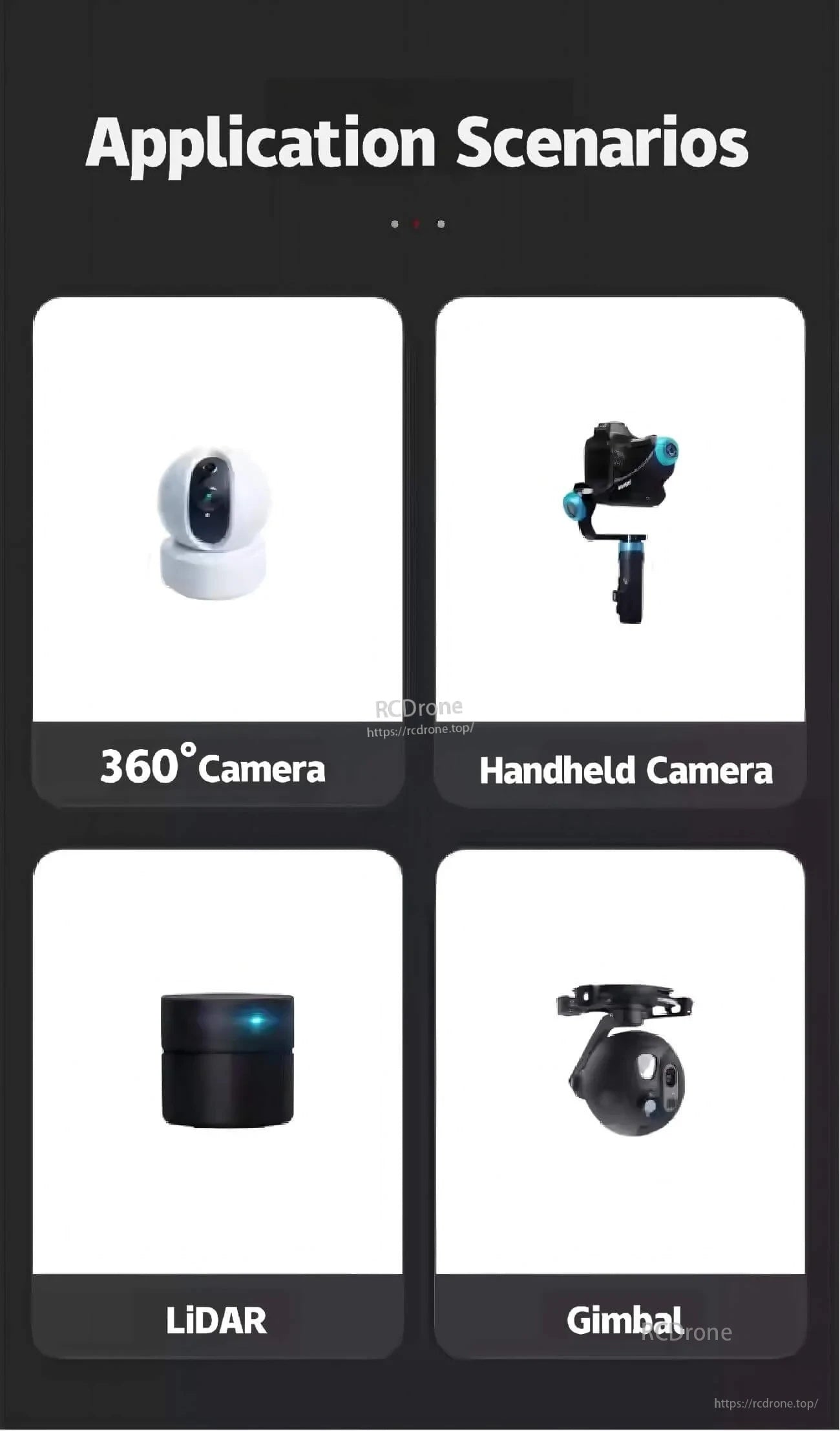
- Cámara 360°
- Cámara de mano
- LiDAR
- Gimbal
Para ayuda con la selección previa a la venta, confirmación de cableado o soporte de documentación, contacta [email protected] or visita https://rcdrone.top/.
Manuales / Documentos
Detalles

MUWEIDU L5028 es un motor servo mini compacto de baja velocidad con un factor de forma de eje hueco para construcciones con espacio limitado.

La electrónica de control integrada admite un amplio rango de entrada y comunicación CAN o RS485 para un control de movimiento preciso.

El etiquetado claro de la interfaz ayuda con el cableado de señales CAN/RS485, conexiones de alimentación y pines UART durante la integración.
La sintonización de parámetros basada en PC y múltiples modos de control facilitan la adaptación de la retroalimentación del encoder de 15 bits o 18 bits a la tarea.
Bien adecuado para proyectos de robótica compacta y estabilización, como sistemas de cámaras, ensamblajes de LiDAR y gimbals.
Related Collections

